
COMBINING RUNTIME DIAGNOSIS AND AI-PLANNING IN A
MOBILE AUTONOMOUS ROBOT TO ACHIEVE A GRACEFUL
DEGRADATION AFTER SOFTWARE FAILURES
J¨org Weber and Franz Wotawa
Institute for Software Technology, Graz University of Technology, Inffeldgasse 16b/2, Graz, Austria
Keywords:
Model-based reasoning, Autonomous robots, Diagnosis, Repair, AI planning, Plan monitoring, Capability
model.
Abstract:
Our past work deals with model-based runtime diagnosis in the software system of a mobile autonomous
robot. Unfortunately, as an automated repair of failed software components at runtime is hardly possible, it
may happen that failed components must be removed from the control system. In this case, those capabilities
of the control system which depend on the removed components are lost. This paper focuses on the necessary
adaptions of the high-level decision making in order to achieve a graceful degradation. Assuming that those
decisions are made by an AI-planning system, we propose extensions which enable such a system to generate
only plans which can be executed and monitored despite the lost capabilities. Among others, we propose an
abstract model of software capabilities, and we show how to dynamically determine those capabilities which
are required for monitoring a plan.
1 INTRODUCTION
Enabling mobile robots to operate autonomously in
unknown, unpredictable and often harsh environ-
ments requires that the robots are equipped with on-
board diagnosis and repair/reconfiguration abilities.
Hardware may be damaged by unexpected interac-
tions with a rough environment, or it may fail due
to internal faults. Complex software systems, on the
other hand, cannot be exhaustively tested and thus
may contain bugs which may lead to runtime failures.
The robot should be able to autonomously detect and
locate failures of hardware or software components,
and it should also be able to properly deal with run-
time failures. This means that the robot should at-
tempt to repair/reconfigure the system in order to re-
store the full capabilities of the system. If this is not
possible, then the robot should try to achieve a grace-
ful degradation, i.e., we want the robot to continue its
mission, maybe at a lower performance.
Whereas most of the past research on runtime
diagnosis and repair/reconfiguration in autonomous
robots has focused on hardware aspects, our work
has tackled the issue of software failures at runtime
(Steinbauer and Wotawa, 2005; Weber, 2009). Typi-
cal failures are software crashes or deadlocks. We as-
This research was partially funded by the Austrian Sci-
ence Fund (FWF) under grant P20199-N15.
sume that the control system is composed of basically
independent components. We proposed to detect fail-
ures by monitoring properties of the control system at
runtime, and we apply model-based diagnosis tech-
niques (Reiter, 1987; de Kleer and Williams, 1987) to
locate the failed components.
We proposed to restart failed software compo-
nents, hoping that they work correctly afterwards.
However, as this is not a real repair which fixes
the root cause of the failure, it may happen that the
restarted component immediately fails again. In this
case, the failed component is aborted and perma-
nently removed from the control system. This leads
to a degradation of the capabilities (functionalities)
of the control system.
In this paper we focus on the adaption of the high-
level decision making after the loss of software ca-
pabilities. Of course, if the lost capabilities are vi-
tal for the operation of the robot, then the robot is no
longer able to do something meaningful. However,
if non-vital components are affected, the robot may
still be able to perform useful tasks, maybe in a de-
graded mode. It may happen that the planning system
can find an alternative plan which achieves the same
goal, or that the original goal can no longer be accom-
plished, but there are other (maybe less useful) goals
which can still be achieved.
We assume that the high-level decision making
127
Weber J. and Wotawa F. (2010).
COMBINING RUNTIME DIAGNOSIS AND AI-PLANNING IN A MOBILE AUTONOMOUS ROBOT TO ACHIEVE A GRACEFUL DEGRADATION AFTER
SOFTWARE FAILURES.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 127-134
DOI: 10.5220/0002752101270134
Copyright
c
SciTePress
of the robot is done by a classical AI-planning sys-
tem which performs a closed-loop control of the
robot. The planning is based on a representation
language similar to the well-known STRIPS repre-
sentation (Fikes and Nilsson, 1972). We propose to
augment the planning system with an abstract model
of the control system’s capabilities. This model is
utilized to derive the currently available capabilities,
based on the diagnostic results provided by the run-
time diagnosis and repair system. Moreover, we pro-
pose to enhance the action specifications with ca-
pability preconditions, stating which capabilities are
required for the low-level execution of the action.
Hence, based on the knowledge about available capa-
bilities, the planning system is now able to generate
plans whose actions can still be executed.
In Sec. 2 we give some background information
concerning our past work on model-based runtime di-
agnosis and repair in a robot control system. We also
outline a control system which serves as running ex-
ample throughout this paper. Thereafter, in Sec. 3
we propose an approach which ensures that the AI-
planning system computes only plans whose actions
are supported by the currently available capabilities.
In Sec. 4 we present a case study, executed on a real
robot control system, which shows that our proposal
can achieve a graceful degradation of the robot’s be-
havior after component failures. Afterwards, in Sec.
5 we discuss the issue that the plan monitoring also
relies on capabilities of the control system. In Sec.
5 and Sec. 6 we propose two alternative solutions to
this problem with the aim that the generated plans are
also monitorable. Sec. 7 contains a discussion of re-
lated research and open issues.
The utilization of diagnostic results in the deliber-
ative layer of mobile autonomous systems has gained
little attention in the past. In particular, we are not
aware of any work from other researchers which ad-
dresses AI-planning with degraded capabilities of the
software system.
2 BACKGROUND: DIAGNOSIS
AND REPAIR IN A ROBOT
CONTROL SYSTEM
In this section we briefly outline our past work on
model-based runtime diagnosis and repair in the soft-
ware system of mobile autonomous robots (Stein-
bauer and Wotawa, 2005; Weber, 2009). The goal of
this work is to detect and locate failed software com-
ponents at runtime without any human intervention.
Our approach mainly aims at severe failures like soft-
ware crashes, ”freezes” (e.g., non-terminating loops
or deadlocks), or major computing errors. We define
components as (largely) independent binary modules
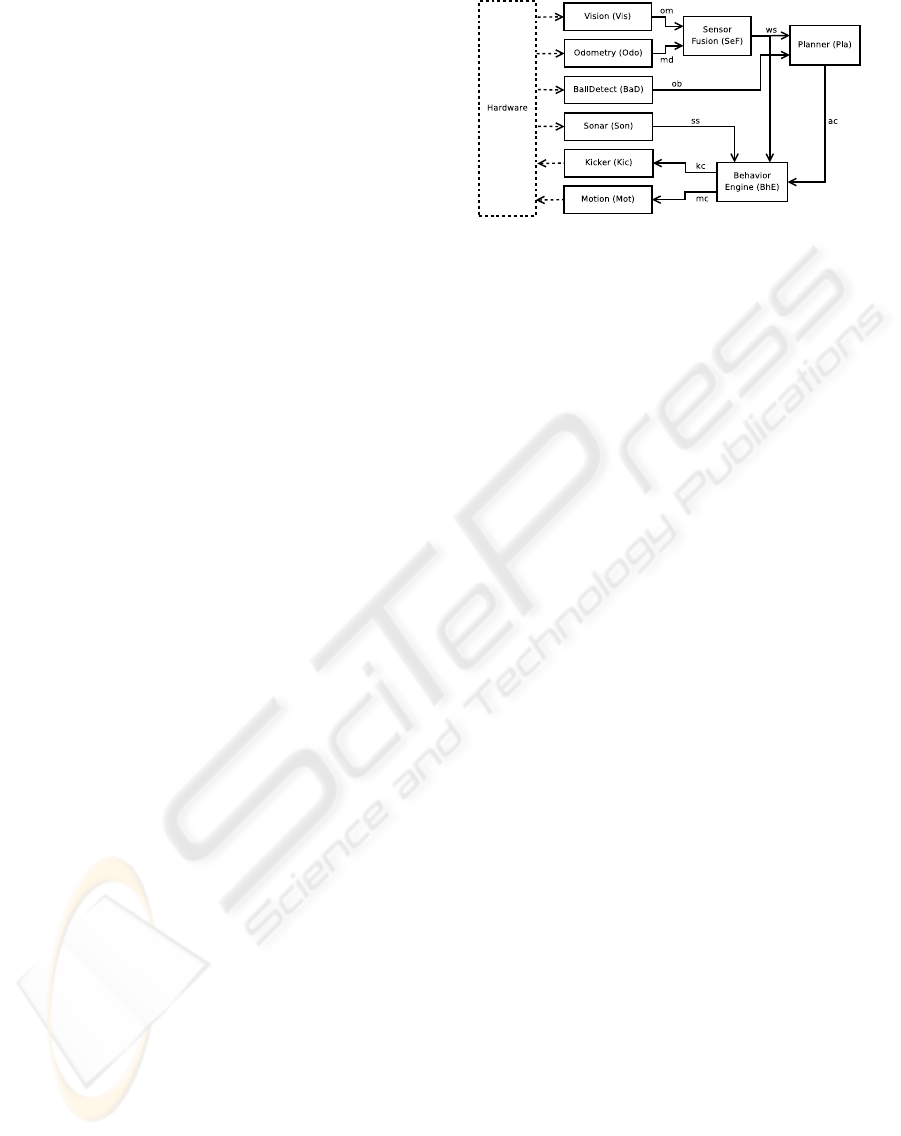
Figure 1: Architecture of a control system for an au-
tonomous soccer robot. Connections depict data flows.
which have no shared memory and which communi-
cate by exchanging events over communication chan-
nels which, in the ideal case, completely decouple the
components.
Figure 1 depicts an architectural view on a sub-
system of a control system of an autonomous soc-
cer robot. This example system will be used
throughout this paper. The components Vision,
Odometry, BallDetect, and Sonar process sensor
data. SensorFusion computes a continuous world
model, containing (among others) the estimated po-
sitions of environment objects. Sonar supplies data
which allows for the detection of obstacles, and
BallDetect, relying on an infrared sensor, states
whether or not the robot possesses the ball (this holds
when the ball is between the grabbers of the robot
s.t. the robot can kick the ball). The Planner is an
AI-planning system which represents the deliberative
layer of the system. It abstracts its continuous inputs
using landmarks, and the resulting qualitative world
state is stored as a set of atomic sentences in an inter-
nal knowledge base. The output of the planning sys-
tem are high-level actions whose low-level execution
is performed by component BehaviorEngine. Finally,
Kicker and Motion directly access the actuators of the
robot, namely the kicking device and the driving unit,
respectively.
For detecting software failures at runtime, we pro-
posed to assign properties to connections. Properties
capture invariant conditions which must hold in the
system. Properties relate to sequences of events on
one or more connections, and at runtime they are con-
tinuously evaluated by executable entities called mon-
itoring rules. Monitoring rules are responsible for de-
tecting property violations.
When a failure is detected by monitoring rules,
we employ the consistency-based diagnosis paradigm
(Reiter, 1987; de Kleer and Williams, 1987) for the
localization of the failed components. I.e., a logical
system description SD, a set of observations OBS, and
a set of componentsCOMP are used for the computa-
tion of diagnoses. SD is a set of first-order sentences
which is intended to describe the correct system be-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
128

havior using the literal ¬AB(c) (with c ∈ COMP)
which denotes ”not abnormal”. We rely on Reiter’s
definition of a diagnosis (Reiter, 1987):
Definition 1 A diagnosis ∆ is a set of components
(∆ ⊆ COMP) s.t.
SD∪OBS∪{¬AB(c)|c∈ COMP\∆}∪{AB(c)|c∈ ∆}
is consistent. A diagnosis is (subset-)minimal iff no
proper subset of it is a diagnosis.
In our approach, SD only captures the logical
dependencies between properties, whereas the prop-
erty conditions are not represented in SD. We illus-
trate this in the following intuitive example, which
considers only the subsystem with the components
{Vis, Odo, SeF}:
Both componentsVis and Odo are supposed to pe-
riodically produce new events at their output connec-
tions om and md, respectively, and SeF must produce
a new output for every incoming event. Hence, we in-
troduced the property type ξ.eo, where ξ is a connec-
tion and eo the name of the property (eo..”event oc-
curs”), which means that at least one event must occur
within a certain timespan at ξ. We assigned instances
of this property type to the connections om, md and
ws. SD expresses the dependencies between those
three properties, using the atomic sentence ok(ϕ) to
state that property ϕ holds:
¬AB(Vis) → ok(om.eo)
¬AB(Odo) → ok(md.eo)
¬AB(SeF)∧
ok(om.eo)∨ok(md.eo)
→ ok(ws.eo)
We assume here that only the property ws.eo
can be monitored at runtime. Now suppose that
ws.eo is violated, i.e., the observations are OBS =
{¬ok(ws.eo)}. By applying a diagnosis algorithm
like Reiter’s Hitting Set algorithm (Reiter, 1987) we
obtain two minimal diagnoses: ∆
1
= {SeF}, ∆
2
=
{Vis, Odo}. I.e., either SeF has failed, or both Vis
and Odo have failed (multiple failure).
As a real repair, which fixes the root causes of
failures by correcting the bugs in the source code,
is hardly possible at runtime, we proposed to restart
failed components, hoping that they do not fail again.
In cases when the diagnostic results are not unique,
i.e., when there are several minimal diagnoses, we
restart every component which occurs in one of the
minimal diagnoses. Although this method often
works in practice, it is not always successful: restarted
components may fail immediately again due to the
same root cause which has not been fixed.
When the repair is not successful, our diagnosis
and repair system removes this component from the
control system; i.e., the component is aborted and
not restarted afterwards, but the robot continuous to
operate, if possible. The runtime diagnosis system
then continuous to monitor the system, after certain
Figure 2: A capability graph. Rectangles are components,
and rounded rectangles are capabilities (6 basic and 3 com-
posed capabilities).
adaptions which we do not discuss here (see (Weber,
2009)). Note that software components can only be
removed if they are loosely coupled with the rest of
the system.
3 DEGRADED CAPABILITIES,
PLANNING
Let COMP
fail
be the set of all those components
which have so far been removed from the original
control system. Then we use
COMP
act
def
= COMP \COMP
fail
to denote those components which are currently ac-
tive (alive) and, according to the diagnosis system,
correctly working. Our approach demands that the di-
agnosis and repair system reports this set to the plan-
ning system at least after each repair session which
has removed components. Note that the handling of
ambiguous diagnoses is done by the diagnosis sys-
tem; i.e., if the diagnosis system is not able to come
up with a unique diagnosis, then it might be possible
that components of multiple diagnoses are removed
from the control system. The planning system always
receives a single set COMP
fail
, which may contain
several components which have been removed.
The planning system then employs a model of the
abstract capabilities of the control system to infer the
remaining capabilities. The proposed model is visu-
alized by the capability graph. A capability graph for
the system in Fig. 1 is depicted in Fig. 2. Note that,
for brevity, we introduced a componentVis Odo SeF
which subsumes the three components Vis, Odo and
SeF in Fig. 2, and the same applies analogously to
BhE Mot. Moreover, the component Pla is not in-
cluded, since we assume that the planning system has
not failed.
A capability graph CG is a directed acyclic graph
(DAG) with the following attributes:
• For each component c ∈ COMP there is exactly
one source node (a node without incoming edges)
in CG. It is called component node.
COMBINING RUNTIME DIAGNOSIS AND AI-PLANNING IN A MOBILE AUTONOMOUS ROBOT TO ACHIEVE
A GRACEFUL DEGRADATION AFTER SOFTWARE FAILURES
129

• All other nodes represent either basic capabilities
or composed capabilities.
• A basic capability has exactly one direct prede-
cessor in CG which must be a component node.
The involved edges indicate which capabilities
are provided by the components. E.g., both
can CmdMot and can CmdKick are provided by
BhE Mot.
• A composed capability has one or more di-
rect predecessors which represent (basic or com-
posed) capabilities. E.g., can CtlMot is com-
posed of has WS and can CmdMot, meaning
that can CtlMot is available if both has WS and
can CmdMot are available.
Note that we distinguish between sensing capa-
bilities (prefix has X) and acting capabilities (pre-
fix can X). The component Vis Odo SeF provides a
continuous world state (has WS), BaD provides ball
detection, Son provides obstacle data, BhE Mot pro-
vides the capabilities to command motions as well as
kicks, and Kic can access the kicking device. Capabil-
ity can CtlMot capturesthe followingfact: in order to
control a motion (in the sense of control theory), the
system needs not only to be able to command motions
(can CmdMot), but also to receive sensor feedback
indicating how the world changes (has WS). More-
over, if the system also has obstacle data, then the
motion control is augmented with a reactive obstacle
avoidance (can CtlMotOA).
The semantics of a capability graph CG is cap-
tured by the software capabilities description (SCD).
It is a set of Horn clauses using the predicate active(c)
which states that c ∈ COMP is active and correctly
working, and av(b) indicates that capability b is cur-
rently available. Moreover, let CAP denote the set of
all capabilities used in CG. SCD is automatically gen-
erated from CG as follows:
For every capability b ∈ CAP:
• if b is a basic capability provided by component
c: add active(c) → av(b) to SCD.
• otherwise, b is composed of the capabilities
b
1
, . . . , b
m
(m ≥ 1):
add av(b
1
)∧ . . . ∧ av(b
m
) → av(b) to SCD.
In our example, SCD contains the following sen-
tences:
active(Vis Odo SeF)→av(has WS)
active(BhE Mot) → av(can CmdMot)
active(BhE Mot) → av(can CmdKick)
av(has WS)∧av(can CmdMot) → av(can CtlMot)
. . .
With AVCAP we denote the set of currently avail-
able capabilities, and AVCAP comprises those capa-
bilities which are presumably not available. Based on
the set of remaining components COMP
act
, these sets
are computed as follows:
ACTCOMP
def
= {active(c) | c ∈ COMP
act
}
AVCAP
def
= {av(b) | b ∈ CAP and
ACTCOMP∪ SCD |= av(b)}
AVCAP
def
= {¬av(b) | b ∈ CAP and
ACTCOMP∪ SCD 6|= av(b)}
Clearly, AVCAP and AVCAP can be efficiently
computed by applying a simple Horn clause forward
chaining algorithm.
The important point is that the robot’s actions have
certain requirements concerning the available capa-
bilities: the low-level behaviors, which correspond to
a specific high-level action A , can only be executed if
certain sensing and acting capabilities are available.
In STRIPS (Fikes and Nilsson, 1972) and in similar
representation languages for classical AI-planning,
each action A is specified by a precondition pre(A )
and an effect ef f(A ). Note that we the planner re-
gards actions as deterministic; the handling of unex-
pected action outcomes and environment changes is
left to the plan executor which monitors the plans.
By integrating the required capabilities into the
action precondition we can ensure that a plan com-
prises only actions which are supported by the cur-
rently available capabilities. For this purpose we pro-
pose to split every action precondition into two parts:
pre(A )
def
= pre
E
(A )∧ pre
C
(A )
where pre
E
(A ) is the environment precondition,
which mainly contains conditions related to the phys-
ical environment, and pre
C
(A ) is the capability pre-
condition which relates to the state of health of the
robot. pre
C
(A ) is a conjunction of (positive or nega-
tive) literals of the form (¬)av(b).
An action A can only be executed when pre
C
(A )
is fulfilled, i.e., when the following holds:
AVCAP∪ AVCAP |= pre
C
(A )
Examples are presented in the subsequent section.
Note that if AVCAP ∪ AVCAP is added to the logi-
cal state descriptions, a classical STRIPS-like planner
can be used, as the splitting of the precondition into
two parts is irrelevant for the planning algorithm.
4 CASE STUDY: FINDING
ALTERNATIVE PLANS AFTER
SOFTWARE FAILURES
In this section we present a case study which we con-
ducted on a real robot control system whose (simpli-
fied) architecture was depicted in Fig. 1. The con-
trol system was running on a PC and interacted with a
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
130

Block(obj
1
, obj
2
):
pre
E
: −
pre
C
: av(can CtlMotOA)
eff: blocking(obj
1
, obj
2
)∧¬possBall
Goto(obj):
pre
E
: ¬ inReach(obj)
pre
C
: av(can CtlMotOA)
eff: inReach(obj)∧ ¬possBall
GrabBall:
pre
E
: ¬possBall ∧inReach(Ball)
pre
C
: av(can CtlMotOA)
eff: possBall
DribbleTo(obj):
pre
E
: possBall
pre
C
: av(can CtlMotOA)
eff: inKickPos(obj)
KickBallTo(obj):
pre
E
: possBall∧inKickPos(obj)
pre
C
: av(can CtlMotOA) ∧av(can Kick)
eff: ¬possBall ∧isAt(Ball, obj)
Figure 3: STRIPS-like action schemas. Block(obj
1
, obj
2
)
lets the robot move in-between those two objects. The other
actions have the expected meanings.
soccer robot simulator which simulates the hardware
and the physical environment. We implemented the
runtime diagnosis and repair system which we briefly
described in Section 2.
The planning system uses a planning algorithm
which supports a STRIPS-like language. The diag-
nosis system periodically transmits the set COMP
act
to the AI-planning system. Moreover, each time the
diagnosis system detects a failure, it notifies the plan-
ning system, which then aborts the current plan and
the robot becomes idle (i.e., it enters a safe state). Af-
ter the repair is finished, the planning system is noti-
fied again, and re-planning is performed. The diag-
nosis system continuous to monitor the control sys-
tem after certain adaptions to the system model in SD
which we do not describe here. More details concern-
ing this particular robot control system can be found
in (Weber, 2009).
In this case study we simulated the crashes of
three different components at three different times;
i.e., there were three consecutive single failures, all
of which led to a correct and unique single-fault di-
agnosis. In all of these three cases, the injected fault
also prevented a successful restart of the component,
hence the restarted components failed again during
startup and thus were automatically removed from
the control system. I.e., each failure led to a further
degradation of the control system’s capabilities.
Figure 3 depicts those actions which are relevant
for this case study. An interesting insight is that it
may be desirable to introduce additional actions with
lower capability requirements in order to achieve a
graceful degradation. All actions in Fig. 3 (indirectly)
require the capability has ObstData; i.e., their exe-
cution relies on the existance of an obstacle avoid-
ance (OA). Hence, if the component Son fails, then
none of those actions can be executed anymore. We
tackled this problem by adding new actions which
achieve a similar effect as the already existing ones,
albeit with lower efficiency: for each of the actions
in Fig. 3 we introduced corresponding actions which
are performed at a lower motion speed and thus can
be executed without obstacle avoidance, as the likeli-
hood of physical damage in case of a collision is much
smaller. These new actions have the suffix slow, e.g:
Block slow(obj
1
, obj
2
):
pre
E
: . . . [as in Fig. 3]
pre
C
: av(can ExecMotBeh)∧ ¬av(can ExecMotBehOA)
eff: . . . [as in Fig. 3]
In this case study, initially all components were
active and thus all capabilities were availble. The
planning system selected the planning goal
G
1
= isAt(Ball, OppGoal)
, i.e., the ball should be in the opponent goal. The
following plan was generated:
P
1
= hGoto(Ball), GrabBall,
DribbleTo(OppGoal), KickBallTo(OppGoal)i
During the execution of the first action
Goto(Ball) we triggered the failure of component
Son. After a failed restart, Son was removed from
the system: COMP
fail
= {Son} and so AVCAP =
{¬av(has ObstData), ¬av(can CtlMotOA)}.
The planning system performed re-planning, and
an alternative plan was found for the same goal G
1
:
P
2
= hGoto slow(Ball), GrabBall slow,
DribbleTo slow(OppGoal),
KickBallTo slow(OppGoal)i
During the execution of Goto slow(Ball),
component Kic failed, leading to COMP
fail
=
{Son, Kic} and AVCAP = {¬av(has ObstData),
¬av(can CtlMotOA), ¬av(can AccKick),
¬av(can Kick)}.
Again, the planning system selected the planning
goal G
1
, but this time no plan was found which
could achieve G
1
, because the loss of the capability
can Kick prevents that the ball can be kicked into the
opponent goal. Hence, another planning goal (which
has a lower utility) was selected:
G
2
= blocking(Ball, OwnGoal)
and the corresponding plan was
P
3
= hBlock slow(Ball, OwnGoal)i
I.e., the robot should act as a defender by block-
ing the area between the ball and the own goal.
During the execution of this action, component
COMBINING RUNTIME DIAGNOSIS AND AI-PLANNING IN A MOBILE AUTONOMOUS ROBOT TO ACHIEVE
A GRACEFUL DEGRADATION AFTER SOFTWARE FAILURES
131

SeF failed, and so AVCAP = {. . . , ¬av(can CtlMot),
¬av(can CtlMotOA)}. It can be seen that vital capa-
bilities had been lost, and so none of the predefined
planning goals could be accomplished anymore.
Nevertheless, this case study shows that it may
be possible to achieve the same planning goals de-
spite the loss of capabilities, although the perfor-
mance (e.g., the motion speed) may decline. More-
over, if it is no longer possible to pursue the origi-
nally selected goal, then it can be useful to choose
other goals, which can still be accomplished, in order
to achieve a graceful degradation.
5 PLAN MONITORING
A capability precondition pre
C
(A ) captures the ca-
pabilities which are required for the execution of the
low-level behaviors which correspond to an action
A . However, an important observation is that even
if pre
C
(A ) holds, this does not necessarily imply that
this plan can also be monitored by the plan executor,
because the monitoring of an action A may require
sensing capabilities which are not needed for the exe-
cution of the low-level behaviors.
As example we consider action GrabBall (Fig.
3). This action moves the robot to the ball with the
intended effect that the robot possesses the ball af-
terwards (i.e., possBall should become true, which
happens when an infrared sensor detects that the ball
is between the grabbers of the robot). The low-level
execution of this action does not require a ball de-
tection capability (has WS is sufficient); however, the
truth value of the effect possBall can only be evalu-
ated if has BallDet is available. In other words, with-
out this capability the plan executor can never detect
when this action is finished.
It follows that we should seek plans which can
also be monitored wrt the currently available capa-
bilities. This particularly concerns those predicates
used by the planning system which capture percep-
tions about the physical environmentand whose (truth
value) evaluation thus relies on sensing capabilities.
We introduce a function γ(p) which returns for each
predicate p the (possibly empty) set of those sensing
capabilities which are needed for the evaluation of p
(i.e., γ(p) ⊆ CAP). Furthermore, for any first-order
sentence Φ, let P (Φ) denote the set of all predicates
occurring in Φ, and we define:
Γ(Φ)
def
=
V
p∈P (Φ)
h
V
b∈γ(p)
av(b)
i
I.e., Γ(Φ) states all sensing capabilities required for
the evaluation of the predicates in Φ. Our aim to cre-
ate only plans which can also be monitored wrt the
available capabilities can be achieved by augmenting
each action precondition pre(A ) with a monitoring
precondition pre
M
(A ):
pre(A )
def
= pre
E
(A )∧ pre
C
(A )∧ pre
M
(A )
with: pre
M
(A )
def
= Γ
pre
E
(A )
∧ Γ
ef f (A )
For example:
γ(possBall) = {has BallDet}
γ(inReach) = {has WS}
pre
M
(GrabBall) = av(has BallDet)∧av(has WS)
This approach is simple and also efficient in the
sense that it has a low impact on the planning com-
plexity. However, it also has the severe drawback that
it may be too restrictive, because it takes every effect
of an action into account, although some effects may
be irrelevant in the current context and thus do not
need to be monitored:
E.g., let us consider the action Goto(obj). One
effect of this action is ¬possBall; i.e., even if the
robot possesses the ball when this action is started, the
ball will usually be lost during the movement (in con-
trast to DribbleTo). The monitoring precondition is
pre
M
Goto(obj)
= av(has BallDet)∧av(has WS).
Now suppose that component BaD fails and so
has BallDet is lost. This means that a planning goal
G = inReach(X) can no longer be achieved, since
pre
M
Goto(obj)
is not fulfilled. Clearly, this is an
undesired result, as Goto(X) does certainly not need
a ball detection to achieve inReach(X), and the action
effect ¬possBall is irrelevant here.
One attempt to resolve this issue would be to de-
fine ¬possBall as a side-effect of Goto(obj), mean-
ing that this part of the effect does not need to be
monitored. However, a static separation into primary-
effects and side-effects is problematic in general, be-
cause the relevance of effects often depends on the
context, i.e., it depends on the plan which contains
the action and on the goal to achieve. E.g., it may
well be the case that a subsequent action in a plan re-
quires that ¬possBall holds. Notice that side-effects
have been used before in AI-planning, but mainly for
reducing the search costs; e.g., see (Fink and Yang,
1993).
In the following section we propose an alternative
approach which relies on a plan execution technique
to ensure the monitorability of created plans.
6 DYNAMICALLY DETERMINE
THE MONITORABILITY OF A
PLAN
We propose to dynamically check the monitorability
of entire plans rather than only considering single ac-
tions regardless of the context. This has the advan-
tage that action effects, which are irrelevant in a given
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
132

Table 1: Kernels for the plan hGoto(X)i which achieves the
planning goal G = inReach(X).
Kernel / Action: Γ(K
i
):
K
1
¬inReach(X)∧av(can CtlMotOA) av(has WS)
A
1
Goto(X)
K
2
inReach(X) av(has WS)
plan, are ignored. For this purpose we employ kernel
models, an approved plan execution method that was
introduced for the monitoring of STRIPS plans (Fikes
et al., 1972). In the following we provide a brief in-
troduction to kernels.
For a STRIPS plan hA
1
, . . . , A
n
i, the correspond-
ing kernels are K
1
, . . . , K
n+1
. Table 1 depicts the ker-
nel for a very simple plan containing a single action.
A kernel K
i
occurs immediately before A
i
and K
i+1
immediately after A
i
. A kernel K
i
is a conjunction
of literals, and it has the property that, if K
i
holds
in the current world state, then the sequence of ac-
tions hA
i
, . . . , A
n
i can be executed and will achieve
the planning goal, provided that the action executions
lead to the desired results as indicated in the effects.
The kernels are usually computed by the plan execu-
tor before the execution of the plan starts. The com-
putation of kernels is done backwards, i.e., it starts
with the last kernel and then moves forward:
1. K
n+1
is equal to the STRIPS goal condition G.
2. For every other kernel K
i
with 1 ≤ i ≤ n: K
i
is a
conjunction of those literals which are contained
in the precondition of A
i
plus those literals in K
i+1
which are not part of the effect of A
i
.
The plan execution based on the kernels works as
follows: At each execution step, the plan executor it-
erates backwards through the kernels (i.e., in the or-
der K
n+1
, . . . , K
1
) and checks for each kernel K
i
if it is
satisfied in the current world state. As soon as such a
kernel K
i
is found, the action A
i
is executed. If no ker-
nel is satisfied, then replanning is necessary. A plan is
finished when K
n+1
is true in the current world state.
An important property of this monitoring ap-
proach is that those effects of an action A
i
which are
required neither for preconditions of subsequent ac-
tions (A
i+1
, . . . , A
n
) nor for the planning goal G are
not added to the kernels. E.g., in Tbl. 1 we can see
that the effect ¬possBall of Goto(obj) does not oc-
cur in any kernel, but it would be added if a subse-
quent action required ¬possBall in its precondition.
Hence, by relying on kernels we can resolve
the issue that only relevant action effects should be
considered when determining the monitorability of
a plan. For a given plan P = hA
1
, . . . , A
n
i, which
achieves a planning goal G, and the corresponding
kernels K
1
, . . . , K
n+1
, we say that P is monitorable wrt
the available software capabilities iff the following
holds:
AVCAP |=
V
i=1,..,n+1
Γ(K
i
)
For example, the plan hGoto(X)i for the goal
G = inReach(X) (Tbl. 1) is monitorable iff has WS
is available.
The monitorability can be checked after the en-
tire plan has been computed. However, if we want
to achieve that only monitorable plans are computed,
then a better approach is to check the monitorability
of (sub-)plans already during the planning. I.e., the
computation of the kernels can be interleaved with
the planning, and plans which are not monitorable
according to our definition above can already be dis-
carded during planning.
As the generation of kernels is done backwards
(i.e., starting with the planning goal), it will often
be straightforward to efficiently integrate the kernel
generation with planning algorithms which perform a
backwards search through the state-space. In fact, it
can be easily shown that the well-known regression
planner as described in (Weld, 1994) already com-
putes the kernels as a by-product of the search.
7 DISCUSSION AND RELATED
RESEARCH
The main goal behind our work is to enable an au-
tonomous robot to perform meaningful tasks despite
the failures of software components which cannot be
repaired. The contribution of this paper is threefold:
First, we proposed an approach which ensures
that the AI-planning system of the robot computes
only plans whose actions can still be executed de-
spite the degraded capabilities of the partly failed
software system. For this purpose we introduced an
abstract model of the capabilities of the control sys-
tem, and we formally described how to derive the
currently available capabilities. This self-awareness
is utilized by enhancing action specifications with ca-
pability preconditions. The main advantages of our
approach are that the available capabilities can be ef-
ficiently computed, and that classical planning algo-
rithms can be applied without modifications.
Second, we presented a case study which we exe-
cuted on a real robot control system. It shows that our
approach can achieve a graceful degradation of the
robot’s behavior after the loss of capabilities. Some-
times the same planning goals can be accomplished
by alternative actions, which may have a lower per-
formance. In other cases the original goals can no
longer be accomplished, but the robot may continue
to operate after the selection of alternative goals, even
though the new goals may have a lower utility.
Third, we discussed the issue that the plan mon-
itoring also requires the availability of certain ca-
COMBINING RUNTIME DIAGNOSIS AND AI-PLANNING IN A MOBILE AUTONOMOUS ROBOT TO ACHIEVE
A GRACEFUL DEGRADATION AFTER SOFTWARE FAILURES
133

pabilities. We proposed two approaches with the
aim to generate only plans which are also moni-
torable. The first approach enhances action specifica-
tions with monitoring preconditions. The second ap-
proach, which provides more flexibility, is to dynam-
ically determine the monitorability of entire plans.
We have also proposed to integrate the monitorabil-
ity checks into the planning algorithm. Such an in-
terleaved approach achieves that plans which are not
monitorable are already discarded at an early stage
during the planning process.
So far, the issue of utilizing diagnostic results
in high-level planning in autonomous systems has
gained little attention among researchers. In par-
ticular, we are not aware of any work from other
researchers which has addressed the issue of AI-
planning with degraded software capabilities in au-
tonomous systems. The Remote Agent architecture
(Williams et al., 1998) employs model-based diag-
nosis methods for the detection and localization of
hardware failures. If such a failure cannot be handled
locally, the degraded capabilities are reported to the
planning system and replanning is performed. How-
ever, the scope of that work is quite different from
ours: it deals with hardware rather than software, and
it does not specifically address the modelling of capa-
bilities or plan monitoring issues.
Model-based diagnosis techniques can also be em-
ployed for the execution monitoring of plans, see,
e.g., (Roos and Witteveen, 2005). The authors of (Mi-
calizio and Torasso, 2007) use model-based diagno-
sis techniques to monitor the execution of multi-agent
plans. One aim of this work is to provide the global
planner/scheduler with the assessed status of robots
and the explanations of failures. However, a deeper
discussion of the planning and plan monitoring issues
in this context is not provided.
The practical applicability of our approach to ex-
isting robot control systems is limited by the fact that
most components in such systems are vital, i.e., when
a vital component fails, then the robot is not able to
operate anyway. In our examplesystem in Fig. 1, only
3 out of 9 componentsare non-vital, namely BaD, Son
and Kic. This indicates that the architectural design
of robot control systems should accomodate runtime
reconfiguration; in particular, the number of compo-
nents should be higher, and non-vital functionality
should be encapsulated in separate components in or-
der to achieve that there are many components with
non-vital functionality.
An interesting direction for future research is the
question of how to extend our approach to hard-
ware failures. The modelling of hardware capabilities
could be challenging, in particular because hardware
components may degrade gradually. E.g., the driving
unit may no longer be able to perform specific move-
ments after the breakdown of a single wheel.
Another assumption behind our work is that the
selected set of leading diagnoses comprises the real
fault, hence removing all components in those diag-
noses switches the system to a safe state where all
remaining components work correctly. This may not
be the case in practice, thus a careful selection of the
leading diagnoses is necessary.
REFERENCES
de Kleer, J. and Williams, B. C. (1987). Diagnosing multi-
ple faults. Artificial Intelligence, 32(1):97–130.
Fikes, R. E., Hart, P. E., and Nilsson, N. J. (1972). Learn-
ing and executing generalized robot plans. Artificial
Intelligence, 3(4):251–288.
Fikes, R. E. and Nilsson, N. J. (1972). STRIPS: A New
Approach to the Application of Theorem Proving to
Problem Solving. Artificial Intelligence, 2(3-4):189–
208.
Fink, E. and Yang, Q. (1993). Characterizing and automat-
ically finding primary effects in planning. In IJCAI,
pages 1374–1379.
Micalizio, R. and Torasso, P. (2007). On-line monitoring of
plan execution: A distributed approach. Knowledge-
Based Systems, 20(2):134–142.
Reiter, R. (1987). A theory of diagnosis from first princi-
ples. Artificial Intelligence, 32(1):57–95.
Roos, N. and Witteveen, C. (2005). Diagnosis of plans and
agents. In Proceedings of the 4th International Cen-
tral and Eastern European Conference on Multi-Agent
Systems (CEEMAS).
Steinbauer, G. and Wotawa, F. (2005). Detecting and locat-
ing faults in the control software of autonomous mo-
bile robots. In Proc. IJCAI, pages 1742–1743, Edin-
burgh, UK.
Weber, J. (2009). Model-based Runtime Diagnosis of the
Control Software of Mobile Autonomous Robots. PhD
thesis, Institute for Software Technology, Graz Uni-
versity of Technology, Austria.
Weld, D. S. (1994). An introduction to least commitment
planning. AI Magazine, 15(4):27–61.
Williams, B. C., Nayak, P., and Muscettola, N. (1998). Re-
mote agent: To boldly go where no AI system has
gone before. Artificial Intelligence, 103(1-2):5–48.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
134
