
PRESELECTION OF NEUROSTIMULATION WAVEFORMS FOR
VISUAL PROSTHESES USING GENETIC ALGORITHMS
Samuel Romero, Alberto Guill
´
en, Crist
´
obal J. Carmona
Department of Computer Science, University of Jaen, Spain
C. Morillas, F. Pelayo, H. Pomares
Department of Computer Technology and Architecture, University of Granada, Spain
Keywords:
Visual prostheses, Electrical neurostimulation, Bioelectric waveform, Genetic algorithms.
Abstract:
Among the variety of approaches for developing therapies for the blind, electrical neurostimulation of the
visual pathways seems to be a promising choice. Delivering bi-phasic bioelectric pulses to the nerves implies
the selection of values for a number of parameters within a wide range. This needs to be done for every im-
planted electrode, and for every patient. Nowadays, electrode arrays can include up to one hundred channels,
and we expect to raise to thousands of them in a near future. This unavoidable task becomes extremely time-
consuming both for the researcher and for the patient. Therefore, in order to reduce the number of tests to be
carried out in vivo, we propose the use of multi-objective genetic algorithms that can provide a limited set of
candidate waveforms to be tried.
1 INTRODUCTION
According to estimations by the World Health Orga-
nization (WHO, 2005), 45 million people are legally
blind, and more than 135 million persons suffer from
low vision. The number of patients losing their visual
function is expected to rise in the next years, as many
of the illnesses causing blindness are related to aging.
Whenever a person gets blind, severe limitations
in a variety of aspects of his or her life arise. The
patient finds a number of handicaps in daily activity,
labor, autonomy, social interaction, etc. Additionally,
blindness imposes high costs to public health admin-
istrations.
The term blindness has a functional meaning.
However, a wide variety of traumas and illnesses can
be behind this condition: age-related macular degen-
eration (AMD), diabetic retinopathy, retinitis pigmen-
tosa (RP), cataracts, accidents, etc.
The plethora of resources under research for cur-
ing blindness is even more varied than the illnesses
behind it. Research groups are trying to find treat-
ments for visual deprivation from different perspec-
tives: pharmacology, surgery, gene therapy, or even
electrical neurostimulation.
This paper presents an approach to obtain a re-
duced set of stimulation parameters in order to limit
the range of possible combinations of possible values
for electrical neurostimulation. The optimization of
the parameters is done by means of a multiobjective
genetic algorithm which is able to find a balance be-
tween the different solutions.
2 VISUAL NEUROPROSTHESES
FOR BLINDNESS
This last bioengineering therapeutic research line tries
to restore a rudimentary, but functional form of visual
perception, by artificially stimulating part of the valid
remaining neural tissue in the visual pathway.
In this line, several research projects for creat-
ing a visual neuroprosthesis for the blind are cur-
rently under development. Thus, we can mention reti-
nal implants (Humayun, 2003), optic nerve implants
(Veraart, 1998), and cortical implants (Troyk, 2003;
Fern
´
andez et al., 2005a). All of them try to elicit vi-
sual perceptions by electrically inducing the activa-
tion of nerve cells in the visual pathway.
191
Romero S., Guillén A., J. Carmona C., Morillas C., Pelayo F. and Pomares H. (2010).
PRESELECTION OF NEUROSTIMULATION WAVEFORMS FOR VISUAL PROSTHESES USING GENETIC ALGORITHMS.
In Proceedings of the Third International Conference on Biomedical Electronics and Devices, pages 191-194
DOI: 10.5220/0002744301910194
Copyright
c
SciTePress

Some encouraging results from primitive attempts
can be found in the literature, demonstrating the proof
of concept for visual neuroprosthetic implants (Do-
belle, 2000; Schmidt et al., 1996). In these cases, pa-
tients related the perception of visual sensations when
an electrical pulse was delivered to the implant.
However, a long list of issues needs to be ad-
dressed in order to have a fully usable implant for
the blind: biocompatibility, information processing,
portability, and reliability (Normann et al., 2009).
One of the challenges in these neurostimulation sys-
tems is finding adequate values for a number of pa-
rameters of the stimulation waveform.
We present in this paper an approach to find a
set of candidate waveforms using a multiobjective ge-
netic algorithm. In this way it is possible to find a
balance between the different values to be optimized.
Then, the number of trials with patients in clin-
ical research can be significantly reduced, as only a
reduced set of specific neurostimulation waveforms
need to be tested in vivo.
3 ELECTRICAL
NEURO-STIMULATION
WAVEFORMS
In order to activate a neuron in a biological tissue, an
action potential can be generated by putting an elec-
trode in the neighborhood of the cell, and delivering
electrical charges in the medium (charge injection), or
using the same electrode to create an electrical field
that elicits the re-distribution of electrical charges in
the surroundings. The effect, under adequate condi-
tions, is the generation of a pulse along the axon of
the neuron, known as action potential. This pulse can
be transmitted to the rest of neurons in the visual path-
way, activating a percept in the visual field of the pa-
tient.
Traditionally, neurostimulation pulses are bi-
phasic square waveforms. A negative current at the
beginning induces the effect of the action poten-
tial (”cathodic-first stimulation”), while the positive
counter-phase restores electrochemically the neigh-
borhood of the active tip of the electrode. This way,
the amount of charge after the pulse is delivered re-
mains balanced.
Usually, a train of biphasic pulses is required to
elicit a visual percept or ”phosphene” (a perception
similar to a star in the sky).
The set of values for getting a patient seeing a
phosphene is unknown, and needs to be determined
experimentally. Moreover, these values can be differ-
ent for every electrode in an implant, and for every
implanted patient. This means, that testing all possi-
ble combinations of waveform parameter values, for
every electrode in an implant of 100 or even more
electrodes can take an excessive amount of time.
The set of parameters of the stimulation waveform
are the following:
• Current: amplitude of the negative and positive
phases).
• PD: pulse duration (pulse width in the positive or
negative phase).
• IPHI: inter-phase interval (time between negative
an positive phases).
• IPI: inter-pulse interval (time between two con-
secutive biphasic pulses).
• NPulses: number of pulses in a train.
Time parameters are usually expressed in mi-
croseconds, and current is expressed in microam-
peres.
Our objective is to minimize the amount of charge
injected in the neural tissue (to avoid undesirable
harmful effects), which should be over an unknown
threshold in order to elicit a phosphene. Additionally,
we want to maximize the duration of the phosphene
(”onset”), and the brightness of the percept.
In order to enhance the design of a visual pros-
thesis (Fern
´
andez et al., 2005b), we have developed
a simulator of visual prostheses, based on limited re-
sults of real human implants, from which the rules for
generating the outputs have been extracted.
4 GENETIC ALGORITHMS
APPLIED TO
NEUROSTIMULATION
OPTIMIZATION
Genetic algorithms (GAs) are general purpose search
algorithms which use the principles inspired by nat-
ural genetics to evolve problem solutions (Golberg,
1989). These algorithms have been succesfully ap-
plied to a wide range of real-world problems (Guillen
et al., 2009; Casillas and Carse, 2009; Cord
´
on et al.,
2007; Guill
´
en et al., 2006; Isibuchi, 2007) and are
well known in the computer science field.
A GA defines an initial population of individu-
als, each individual encodes a solution to the prob-
lem. The algorithm iterates until a stop criterium is
reached, the sequence of steps that is followed on each
iteration is:
1. evaluate each individual
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
192
2. select individuals to be crossed
3. apply the crossover operators to generate the off-
springs
4. select which offsprings and ancestors will form
the next population
5. apply mutation
The idea underneath these algorithms is that if two
good solutions are combined together, the resulting
solutions could be better. The literature regarding
GAs presents a large number of papers performing
studies to the different parameters and proposing new
crossover, mutation, selection policies, etc. Among
this vast variety of GAs, there is a special kind known
as MultiObjective Genetic Algorithms (MOGA). The
main feature of these is that they do not consider a
unique value to determine the quality of a solution (in-
dividual) but use a vector of values. Thus, for some
individuals, it is not possible to say that one individ-
ual is better than the other. A Pareto front is a set of
solutions where each solution is not better than the
others.
In a formal way, a multi-objective op-
timization problem can be defined in
the following way:min/max
−→
y = f (
−→
x ) =
f
1
(
−→
x ), f
2
(
−→
x ),· · · , f
n
(
−→
x ) where
−→
x = (x
1
,x
2
,· · · ,x
m
)
is a solution and
−→
y = (y
1
,y
2
,· · · ,y
n
) is the objective
vector (a tuple with n objectives). The aim of any
MOGA is to find all the solutions for which the
corresponding fitness value can not be improved in
a dimension without degrading another. Therefore,
these algorithms can be applied to set some guidelines
when adjusting the electrodes for neuroestimulation,
reducing the number of trials and saving time and
effort to both pacients and researchers.
4.1 Non-dominated Sorting GA-II
One of the most famous MOGAs is the Non-
dominated Sorting GA-II (NSGA2) (Deb et al.,
2002). This algorithm has been widely used in many
applications providing satisfactory results.
The main characteristic of this algorithm is the
way in which the population of the next generation is
obtained. It performs an efficient sorting of the origi-
nal population and the offsprings generated, obtaining
the different sub Paretos and adding them into the new
population until it is completed.
4.1.1 Encoding a Solution
The first step that should be done when applying a GA
is the determination of how an individual encodes a
solution. For the problem tackled in this paper, an in-
dividual consits in a vector of real values where each
gene encondes the three parameters to be optimized.
Figure 1 shows a parameter configuration and how
this is encoded in an individual (Cu=20; PD=60;
IPHI=180; IPI=90; NPulses=84).
Table 1: Representation of a chromosome.
Genotype
Cu PD IPHI IPI NPulses
20 60 180 90 84
4.1.2 Genetic Operators
In this work the standard genetic operators have been
used: Tournament Selection (Miller and Goldberg,
1995), BLX-α (α = 0.3) and Uniform Mutation. For
a real coded genetic algorithm, this type of operators
have shown an adequate performance reaching a bal-
ance between the exploration of the solution space
and the explotation of the good values intervals.
5 EXPERIMENTS
This section presents the results provided by the algo-
rithm for a simulated patient. The model that has to
be optimized was described previously, therefore, the
output of the implemented MOGA is a vector of three
values (Q,Brightness,Onset).
There is a wide research on how these parame-
ters could be tuned, nonetheless, those heuristic can
be always replaced by a manual adjustment based on
a set of experiments. Thus, the given values were the
most adequate after several tests. Due to the non-
deterministic nature of GAs, the algorithm was ex-
ecuted 10 times providing robust results with a few
variation in the results.
In this study the average values of the ten experi-
ments are shown in Table 2 for the objectives consid-
ered: Q, Brightness and onSet.
Table 2: Average values results of the objectives considered
in the algorithm.
Ob jective Value
Q 1.250 nC
Brightness 128 ∈ [0,255]
onSet 64800 µs
As the results showed, the ouput of the algorithm
sets the current in a fixed value, obtaining a wider va-
riety of solutions only for the other two objectives.
PRESELECTION OF NEUROSTIMULATION WAVEFORMS FOR VISUAL PROSTHESES USING GENETIC
ALGORITHMS
193
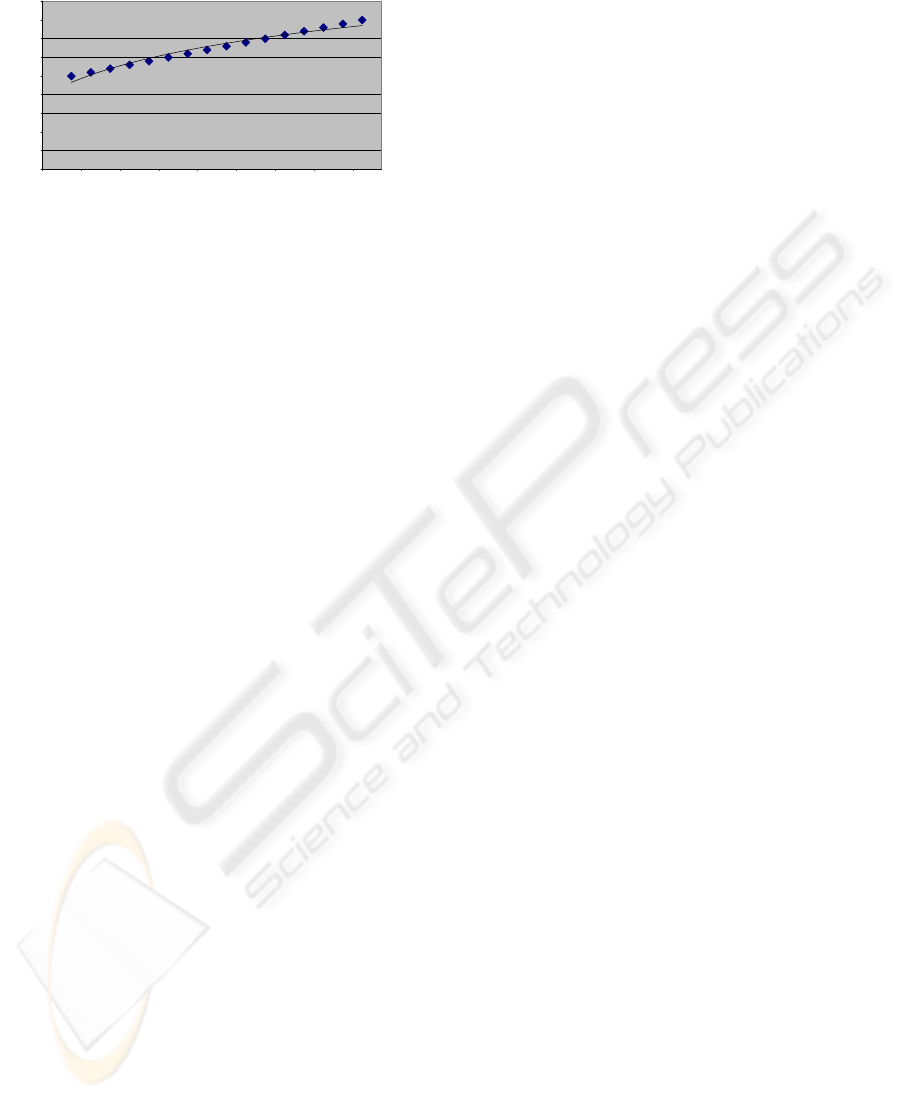
Optimal Pareto Set
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
350 550 750 950 1150 1350 1550 1750 1950
Q
onSet
Figure 1: Final Pareto obtained by the algorithm.(Units: on-
Set is expressed in microseconds, and Q is expressed in pC).
6 CONCLUSIONS
The tunning of stimulation parameters for visual neu-
roprostheses still remains as one of the most trou-
blesome issues to be faced due to the large num-
ber of parameters and the wide range of values.
This paper has presented an application of one of
the most famous optimization tools to this problem
such as Genetic Algorithms. These techniques al-
low the researchers to obtain a reduced set of pos-
sible solutions so the range of recommended values
to be tested in vivo is significantly reduced. For
the concrete case described in the paper, from the
15*15*15*15*100*255=1,290,937,500 possible so-
lutions, a reduced subset of 16 solutions was obtained.
The implementations were tested over a simulation
software providing satisfactory results, showing how
useful is to apply these techniques in order to improve
the adjustment of the neuroprostheses.
ACKNOWLEDGEMENTS
This work has been partially supported by the
Spanish CICYT Projects TIN2007-60587,TIN2008-
06893-C03-02, and Junta Andalucia Projects P07-
TIC-02768, P06-TIC-02007 and TIC-3928, and Uni-
versity of Jaen Project UJA-08-16-10.
REFERENCES
Casillas, J. and Carse, B. (2009). Special issue on Genetic
Fuzzy Systems: Recent Developments and Future Di-
rections. Soft Computing, 13(5):417–418.
Cord
´
on, O., Alcal
´
a, R., Alcal
´
a-Fdez, J., and Rojas, I.
(2007). Special Issue on Genetic Fuzzy Systems:
What’s Next? Editorial, IEEE Transactions on Fuzzy
Systems, 15(4):533–535.
Deb, K., Pratap, A., Agrawal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
NSGA-II. IEEE Transactions Evolutionary Compu-
tation, 6(2):182–197.
Dobelle, W. H. (2000). Artificial Vision for the Blind by
Connecting a Television Camera to the Visual Cortex.
Asaio J, 46:3–9.
Fern
´
andez, E., Pelayo, F., Romero, S., Bongard, M., Marin,
C., Alfaro, A., and Merabet, L. (2005a). Development
of a cortical visual neuroprosthesis for the blind: the
relevance of neuroplasticity. Journal of Neural Engi-
neering, 2(4).
Fern
´
andez, E., Pelayo, F., Romero, S., Bongard, M., Marin,
C., Alfaro, A., and Merabet, L. (2005b). Development
of a cortical visual neuroprosthesis for the blind: The
relevance of neuroplasticity. J. of Neural Eng, 4:R1–
R12.
Golberg, D. (1989). Genetic Algorithms in search, opti-
mization and machine learning. Addison-Wesley.
Guillen, A., Pomares, H., Rojas, I., Gonz
´
alez, J., Valen-
zuela, O., and Prieto, B. (2009). Parallel Multi-
objective Memetic RBFNNs Design and Feature Se-
lection for Function Approximation Problems. Neu-
rocomputing.
Guill
´
en, A., Rojas, I., Gonz
´
alez, J., Pomares, H., Her-
rera, L. J., and Fern
´
andez, F. (2006). Multiobjective
RBFNNs Designer for Function Approximation: An
Application for Mineral Reduction. Lecture Notes in
Computer Science, 4221:511–520.
Humayun, M. S. (2003). Visual perception in a blind sub-
ject with a chronic microelectronic retinal prosthesis.
Vision Res, 43(24):2573–2581.
Isibuchi, H. (2007). Multiobjective genetic fuzzy sys-
tems: review and future research directions. In FUZZ-
IEEE’07, pages 913–918, London.
Miller, B. L. and Goldberg, D. E. (1995). Genetic Al-
gorithms, Tournament Selection, and the Effects of
Noise. Complex System, 9:193–212.
Normann, R. A., Greger, B. A., House, P., Romero, S. F.,
Pelayo, F., and Fernandez, E. (2009). Toward the de-
velopment of a cortically based visual neuroprosthe-
sis. J. Neural Eng., 6(4):049802+.
Romero, S. F., Morillas, C. A., Pelayo, F. J., and Fern
´
andez,
E. (2008). Computer-controlled neurostimulation for
a visual implant. In BIODEVICES (1), pages 84–91.
Schmidt, E., Bak, M., Hambrecht, F., Kufta, C., O’Rourke,
D., and Vallabhanath, P. (1996). Feasibility of a visual
prosthesis for the blind based on intracortical micros-
timulation of the visual cortex. Brain, 119:507–522.
Troyk, P. e. a. (2003). A Model for Intracortical Visual Pros-
thesis Research. Artif. Organs, 11:1005–1015.
Veraart, C. (1998). Visual sensations produced by optic
nerve stimulation using an implanted self-sizing spi-
ral cuff electrode. Brain Res, 813:181–186.
WHO (2005). World health organization: Prevention of
avoidable blindness and visual impairment.
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
194
