
LIMITS OF HUMAN INTERACTION IN DYNAMICALLY SIMILAR
TELEOPERATION SYSTEMS
Under Unknown Constant Time Delay with Impedance Control
V. Parra-Vega, V. P. Garc´ıa-Alvizo, E. Olgu´ın-D´ıaz
Robotics and Advance Manufacturing Group, CINVESTAV, Carr. Saltillo-Monterrey, Km 13.5, Saltillo, M´exico
L. G. Garc´ıa-Valdovinos
Centro de Ingenier´ıa y Desarrollo Industrial, CIDESI, Quer´etaro, M´exico
Keywords:
Teleoperation, Haptic.
Abstract:
Bilateral teleoperation system are prone to instability coming out from the time-delay introduced by the inde-
terministic communication channel. This problem has been subject of intensive research under the assumption
of non-equal master-slave teleoperators, however, what are the implications of dynamically similar teleopera-
tion system (DSTS), is there simpler stability relationship and trade offs among several involved system and
feedback parameters? When we consider a linear DSTS system, there arises the question whether there is an-
alytically any advantage, as it was observed heuristically in several experiments (Cho and Park, 2002). In this
paper, the stability analysis of such system is reported under an impedance control scheme (Garcia-Valdovinos,
2006) when the delay is considered constant but unknown. by applying the Llewellyn’s and Raisbeck’s crite-
ria, it is found and explicit and straightforward relationships between the dynamic and kinematic scaling and
the stability of the system. This result explicitly suggests clearly guidelines among key factors, such as time
delay, desired velocities and feedback gains in terms of the scaling parameters, arises a clear advantage when
dealing with dynamically similar systems. This explains why the transparency of the teleoperation system
is improved by augmenting/reducing the dynamic/kinematic scaling factor, for given desired frequency, time
delay and feedback gains. Simulations and preliminary experimental results illustrate different cases subject
to a number of conditions, which can be very useful to design a physical teleoperation system. A preliminary
mechatronics design is presented.
1 INTRODUCTION
A bilateral teleoperation system is composed of a
master robot and a slave robot, with a human operator
commanding the master robot in order to produce the
desired position and contact force trajectories
1
for the
remotely located slave robot. In turns, the slave robot
follows these trajectories so as to produce contact
forces to be sent to the master robot as desired force
trajectories. In this way, a force/position-force con-
trol system is implemented in the master/slave station
with a communication channel introducing delayed
position and forces signals (Hokayem and Spong,
1984). It is well known that the source of instability
of bilateral teleoperation system appears because the
time-delay introduced by the indeterministic commu-
nication channel is not passive (Q.W. Deng, 2007).
1
Depending whether is in contact or not.
Then, the limits to achieve human operator stable in-
teraction with the slave robot, placed at a remote lo-
cation, through the master robot, becomes an issue, in
particular successful teleoperation requires a certain
degree of transparency
2
and/or telepresence
3
. Stable
interaction is intuitive and easier when mechanical
teleoperators are alike? What are the limits of sta-
ble interaction for dynamically similar teleoperation
system (DSTS) subject to time-delay in the commu-
nication channel?
Furthermore, when we consider a linear DSTS,
there arises the question whether there is analytically
any advantage for being the master and slave robot
dynamically similar, through the kinematic and dy-
2
Manipulation of the slave robot without any dynamics
involved in between.
3
Sensation of being physically in the remote environ-
ment.
102
García-Alvizo V., Parra-Vega V., Olguín-Díaz E. and García-Valdovinos L. (2009).
LIMITS OF HUMAN INTERACTION IN DYNAMICALLY SIMILAR TELEOPERATION SYSTEMS - Under Unknown Constant Time Delay with Impedance
Control.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 102-109
DOI: 10.5220/0002216201020109
Copyright
c
SciTePress

Figure 1: Basic Bilateral Teleoperation Scheme.
namic scaling parameters. It seems DSTS is preferred
to carry out over dissimilar teleoperation systems, as
it was observed heuristically in several experiments
(Cho and Park, 2002).
On one hand, telepresence depends of the degree
of transparency, which can be understood as the si-
multaneous convergence of the position and force er-
ror between the master and slave robot. However it
also depends on the subjective cognition of the hu-
man operator of being there, which depends, among
other aspects, on visual aids of the remote environ-
ment, kinesthetic coupling, the ability to deal with
delayed signals and the man-machine interface. How
does these factors are related in DSTS to guarantee
stable teleoperation?
In this paper, motivated by the empirical observa-
tion that a DSTS is easier to handle, it is argued that
dynamic and kinematic similarity introduce a clear
trade-off of some of these aspects, so it is reason-
able to expect a simpler a trade-off. Analytical re-
sults are found based on an impedance control scheme
(Garcia-Valdovinos, 2006), when the delay is consid-
ered constant but unknown.
1.1 Motivation
When the master and slave teleoperated robots are re-
lated linearly by scaling factors of position and force,
as well as scaling factors on dynamic and kinematic
parameters, a relationship between geometry, power
and perception arise to give to the operator a linear
relationship behavior. Such scaling factors might give
to humans the ability to increase their commanding,
perceptual and cognitive skills in different teleopera-
tion tasks, depending on the task undergoing. It has
been observed experimentally that by tuning prop-
erly these scaling factors a human operator improves
his ability to better teleoperate such system (Cho and
Park, 2002). Can DSTS yield teleoperation tasks with
greater dexterity? What are the trade-offs? It is of in-
terest to understand deeper this phenomena using for-
mal dynamical system tools to analyze properties of
stability of dynamically similar teleoperation system.
1.2 Contribution and Organization
Our basic hypothesis is that as long as the human per-
ceives linear correlated variations in both teleoperated
robots, he can improve the command of the closed-
loop bilateral teleoperation system since spatial and
temporal attributes of the visual remote location and
kinesthetic coupling will vary linearly without distor-
tion. So cognitively, the human can quickly learn to
command the task with greater dexterity. Addition-
ally in this paper we deal with unknown time delay
so we design a novel controller to deal with unknown
constant time delay (Garcia-Valdovinos, 2006), (Cho
and Park, 2002). A computed-torquecontroller is em-
ployed in the master station and a computed torque
second order sliding mode controller in the slave sta-
tion is proposed to produce a desired impedance in
closed loop. Then, absolute stability theory and pas-
sivity is used to analyze the closed-loop stability prop-
erties and therefore the limits of human-teleoperation
stability and thus we found the stability trade-offs. To
this end, a review is presented in Section 2. Then, in
Section 3 the dynamically similar coupled system is
presented, while controllers are explained in Section
4. With this result at hand, absolute stability using
Llewelyn criteria (Llewellyn, 1952), and passivity us-
ing Raisbeck criteria (Raisbeck, 1994), are analyzed
in Sections 5 and 6 respectively. The Llewellyn’s
analysis reveals that a good choice for dynamic scal-
ing factors give us the opportunity for greater bounds
on position and force scaling to execute tasks of high
performance. A quality criterium for transparency
analysis is also presented in Section 7. Simulations
on a 1 DoF teleoperation systems are shown to illus-
trate how this dynamic scaling factor improve the per-
formance of the system, shown in Section 8 to better
understand the numerical performance. Final conclu-
sions are given in Section 9.
LIMITS OF HUMAN INTERACTION IN DYNAMICALLY SIMILAR TELEOPERATION SYSTEMS - Under
Unknown Constant Time Delay with Impedance Control
103

2 DYNAMICALLY SIMILAR
DELAYED TELEOPERATION
SYSTEM
A dynamically similar teleoperation system has con-
stant scaling factors which relate kinematic and dy-
namic parameters of the master and slave robots
(Goldfarb, 1999). This similarity between the sys-
tems is poorly understood so far, since there is not
theoretical apparent evident advantage to work out
with bilateral system, despite some analysis reported
in (Li and Lee, 2003), where the advantages has not
been addressed properly in terms of explicit trade-
offs of feedback gains, system parameters, desired
trajectories and time delay. We surmise in this pa-
per that DSTS improvessignificantly the ability of hu-
mans operating the master teleoperator to carry out ef-
ficiently teleoperation tasks at remote environments,
when there is an unknown time delay involved in the
communication channel.
Impedance control has been explored in (Cho and
Park, 2002) to enforce a desired impedance dynam-
ics in closed loop in order to program arbitrarily the
desired impedance parameters. This closed-loop lin-
ear dynamic allows to model the entire system as a
2-port network to relate the force and flows of input
and output, respectively, by an impedance matrix or
an hybrid matrix. This matrix can be used to describe
the stability of the entire system using the Absolute
Stability Theory (K. Hashtrudi-Zaad, 2000), where a
tight relationship between output scaling factors and
impedance parameters can be found to give sufficient
conditions on stability. However, when dynamic scal-
ing factors are introduced, the master and slave robot
dynamics are related by constants, either in kinematic
and/or dynamic parameters, thus, a sort of advantages
can emerge from this relation since a single feedback
parameter appears. In this paper, we offer an analy-
sis in terms of both the Llewelyn’s criteria and Rais-
beck’s criteria, and verify its real time performance,
which demonstrates a clear and intuitive trade off in
terms of scaling factors of the DSTS.
3 DYNAMICALLY SIMILAR
SYSTEM
Consider the dynamics of a linear teleoperation sys-
tem consisting of two n-DoF manipulators decoupled
systems as follows
M
m
¨x
m
+ B
m
˙x
m
+ K
m
x
m
= F
mc
+ F
m
(1)
M
s
¨x
s
+ B
s
˙x
s
+ K
s
x
s
= F
sc
+ F
s
(2)
where ¨x
i
and ˙x
i
denote acceleration and velocity of the
robot i,respectively; F
mc
, F
sc
are the control force in-
puts and F
m
, F
s
are external forces to the master and
slave systems, respectively; and M
i
, B
i
and K
i
with
i = m, s are the inertia, dampness and stiffness pos-
itive coefficients of the systems. Let K > 0 be the
kinematic scaling factor that relates both master and
slave configuration spaces such that
x
s
=
x
m
K
(3)
This system is said dynamically similar after the co-
ordination (3) if there exists a scalar ζ > 0 such that
M
m
¨x
m
+ B
m
˙x
m
+ K
m
x
m
=
M
s
¨x
s
+ B
s
˙x
s
+ K
s
x
s
ζ
(4)
Thus, the dynamic parameters of (1)-(2) are related
linearly by
ζM
m
= M
s
, ζB
m
= B
s
, ζK
m
= K
s
(5)
The apparent advantage of this dynamic relationship
has not been well explored in the context of tele-
operation with unknown constant time delay, though
there are a lot of heuristical intuition which leads us
to conclude that these systems would allow greater
kinesthetic coupling with greater manipulability dex-
terity as consequence. To this end, it is introduced an
impedance control system (Garcia-Valdovinos, 2006)
to enforce a 2-port closed-loop desired linear system.
4 IMPEDANCE CONTROL LAW
4.1 1 DoF Teleoperation System
Similarly to (1)-(2), let a 1 DoF master/slave teleop-
eration system be modeled as a mass-spring-damper
system, where external master force F
m
on the master
is nothing but the human commanding force F
h
and
the external slave force force F
s
stands as the environ-
mental contact force F
e
, then (1)-(2) becomes
M
m
¨x
m
+ B
m
˙x
m
+ K
m
x
m
= F
mc
+ F
h
(6)
M
s
¨x
s
+ B
s
˙x
s
+ K
s
x
s
= F
sc
− F
e
(7)
where negative sign appears in F
e
due to the positive
convention of the inertial frame axis.
4.2 Impedance Control Law for the
Master
For completeness, the control law (Garcia-
Valdovinos, 2006) is introduced here. Consider
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
104

the following master controller
F
mc
= −F
h
+ B
m
˙x
m
+ K
m
x
m
+
M
m
¯
M
m
(F
h
−
K
f
F
dy
e
−
¯
B
m
˙x
m
−
¯
K
m
x
m
) (8)
Eq. (8) into (6) gives rise to the following desired
impedance equation for the master robot
¯
M
m
¨x
m
+
¯
B
m
˙x
m
+
¯
K
m
x
m
= F
h
− K
f
F
dy
e
(9)
where positive
¯
M
m
,
¯
B
m
,
¯
K
m
are the desired inertia,
dampness and stiffness for the master robot, respec-
tively, and F
dy
e
= F
e
(t − T
s
), being T
s
the delay from
the slave to the master station. That is, the master
impedance control law enforces a desired impedance
(9) in closed-loop, whose parameters are chosen by
the user depending of a specific task, such that:
• when the slave robot is not touching the environ-
ment, F
dy
e
= 0, then (9) becomes a mass-spring-
damper system driven solely by the human force
F
h
, notice that in this case the controller is in po-
sition impedance mode..
• when the slave robot is touching the environment,
F
dy
e
> 0, then (9) becomes a mass-spring-damper
system driven by force error F
h
− K
f
F
dy
e
. In this
case, actuators in the master station makes the
human perceives a contact force equal to K
f
F
dy
e
,
while the human virtually recreates, cognitively,
the surface of the object according to this vec-
tor, through kinesthetic sensations of the scaled
and delayed slave contact force, which arise nor-
mal at the contact slave point and the visual im-
age coming from the slave station. Notice that
when the slave is contact, the master control is in
impedance force control mode.
To achieve such effects, it is necessary to control the
slave robot in impedance position and force control
modes, according to the contact regime.
4.3 Impedance Control Law for the
Slave (Garcia-Valdovinos, 2006)
Similarly to the master controller, the objective in the
slave station is to impose a desired impedance to the
slave robot
¯
M
s
··
˜x
s
+
¯
B
s
·
˜x
s
+
¯
K
s
˜x
s
= −F
e
(10)
where positive
¯
M
s
,
¯
B
s
,
¯
K
s
are the desired inertia,
dampness and stiffness for the slave robot, respec-
tively. The position tracking error ˜x
s
is expressed as
follows
˜x
s
= x
s
− K
p
x
dy
m
(11)
where x
dy
m
= x
m
(t − T
m
), being T
m
the delay from the
master to the slave station. Now, let the following
control law for the slave robot be
F
sc
= −
M
s
¯
M
s
(
¯
B
s
˙x
s
+
¯
K
s
x
s
+ F
e
+ K
i
σ)
+M
s
K
p
¯
M
−1
m
F
dy
h
− K
f
F
dy
e
−
¯
B
m
˙x
dy
m
−
¯
K
m
x
dy
m
+ F
e
+ B
s
˙x
s
− K
g
Ω (12)
σ =
Z
t
0
sgn(I
e
(τ))dτ (13)
where F
dy
h
= F
h
(t − T
m
). Notice that the feedforward
term F
dy
e
allows control without any measurement of
the time delay. In any case, notice that F
dy
e
is available
for measurement at any time.
Notice that the gain K
g
is a new control variable
that weights the extended error variable Ω. The pro-
posed sliding surface I
e
is proposed naturally out of
(10), that is we want (10) to be the attractive conver-
gent manifold, then the extended error manifold is
I
e
=
¯
M
s
¨x
s
+
¯
B
s
˙x
s
+
¯
K
s
x
s
+ F
e
(14)
Then we can build a high order sliding surface Ω as a
function of the sliding surface I
e
as follows
4
Ω =
1
¯
M
m
t
Z
0
I
e
(τ)dτ +
t
Z
0
t
Z
0
sgn(I
e
(τ))dσdτ
(15)
Finally, substituting (12)-(13) into (7) gives rise to the
closed-loop error equation for the slave robot:
˙
Ω = −βΩ (16)
where β =
K
g
M
s
> 0 is Lipschitz. Consequently, all
closed-loop signals in the slave station are bounded,
enforcing exponential convergence of Ω → 0. There-
fore, this chain of implications means that a second
order sliding mode is enforced, and a sliding mode
arises, at I
e
= 0, which means that (10) arises in finite-
time.
A closer analysis shows that the slave impedance
control law enforces a desired impedance in closed-
loop whose parameters are chosen by the user de-
pending of a specific task, such that:
• when the slave robot is not touching the environ-
ment, F
dy
h
= 0, F
e
= 0 and (10) becomes an un-
forced mass-spring-damper system such that ˜x
s
→
0 and the slave tracks the desired delayed position
and velocities of the master. Notice that when the
slave is not in contact, the slave control is in posi-
tion impedance control mode.
4
Notice that if (14) converge to zero, then (9) appears
and the human would perceive the desired impedance to
control at will the slave robot.
LIMITS OF HUMAN INTERACTION IN DYNAMICALLY SIMILAR TELEOPERATION SYSTEMS - Under
Unknown Constant Time Delay with Impedance Control
105

• when the slave robot is touching the environment,
F
e
> 0 and (10) becomes a mass-spring-damper
system driven by the slave contact force F
e
. In
this case, actuators in the slave station make that
the slave robot maintains contact (| ˜x
s
|> 0) while
F
e
stays around F
dy
h
. Notice that when the slave is
in contact, the slave control is in impedance force-
position control mode.
With this result, it is now important to analyze the ab-
solute stability properties to find the conditions under
which this result is valid.
5 ABSOLUTE STABILITY
ANALYSIS
With the desired impedance imposed by the con-
trollers (8) and (12)-(13), the closed-loop dynamics
(9) and (10) can be modeled as a 2-port network.
Transforming this dynamic into the frequency domain
and doing some algebra, closed-loop system can be
represented as
F
h
V
s
= H
V
m
−F
e
(17)
where H is the so called Hybrid Matrix. Using the
relationship (5) the hybrid matrix is built from ele-
ments depending of function of the desired master
impedance parameter as follows
H =
"
¯
M
m
s
2
+
¯
B
m
s+
¯
K
m
s
K
f
e
−T
s
s
K
p
e
−T
m
s
ζ
s
¯
M
m
s
2
+
¯
B
m
s+
¯
K
m
#
(18)
which is fundamental to carry out the implications
of a unique dynamic scaling factor. To proceed, it
is useful to give the following definition on 2-port
systems:
Definition: Absolute Stability Criteria for 2-port
Systems: A two-port system (17)-(18) is absolute sta-
ble if it does not exist a set of impedances for which
the entire system become unstable. If the network is
not absolutely stable, it is potentially unstable. By the
conditions of the llewellyn’s criteria a 2-port network
is absolutely stable if and only if
1. h
11
and h
22
have no poles in the right half plane
2. Any poles of h
11
and h
22
on the imaginary axis are
simple with real and positives residues
3. For all real values of ω
• Re{h
11
} ≥ 0
• Re{h
22
} ≥ 0
• 2Re{h
11
}Re{h
22
} − Re{h
12
h
21
} − |h
12
h
21
| ≥ 0
Notice that since the human operator is physically
holding with his hand the master robot, it is imper-
ative to ensure stable behavior, thus it is required to
guarantee the fulfillment of previous Definition. To
this end, notice that conditions 1. and 2. are trivially
satisfied with positive impedance parameters. The
third condition, when using (18), becomes:
A. [cos(T
m
+ T
s
)ω− 1]K
p
K
f
+ 2ζν ≥ 0
B. K
p
K
f
≤ ζν
(19)
where
ν =
(
¯
B
m
ω)
2
(
¯
K
m
−
¯
M
m
ω
2
)
2
+ (
¯
B
m
ω)
2
(20)
Inequality (19), necessary for the absolute stabil-
ity of the system, shows that the scaling factors of
position, force, and dynamical similarity ζ are critical
for the design and performance of the teleoperation
system.
Therefore, the consequences of introducing a dy-
namic similar system in teleoperation, from the point
of view of Absolute Stability, are:
1. A unique similarity factor ζ is introduced, which
offers a simpler analysis and easy to tune system.
2. The similarity factor ζ allows to derive simpler
conditions of absolute stability.
3. The similarity factor ζ improves the design
methodology of teleoperators based in impedance
controllers. That is, there is a clear trade-off of all
important parameters of the system, depending on
the desired performance (ω), impedance parame-
ters
¯
M
m
,
¯
B
m
¯
K
m
, position scaling K
p
and force scal-
ing K
f
and time delays, a ζ can be found.
4. From (18), the scaling factor ζ allows bigger mar-
gin on other parameters, thus the opportunity to
improve performance based on the physical struc-
ture of the teleoperation system.
5. Due to the fact that both master and slave
impedance parameters are related by this factor,
the whole set of parameters can be expressed in
terms of each other, which minimize the number
of parameters implied in the design process mak-
ing it easier to establish a performance limit.
6 PASSIVITY ANALYSIS
Passivity is a powerful criteria to analysis the ener-
getic coupling of a closed loop system, a more conser-
vative implication in comparison to Lyapunov stabil-
ity criteria, however since the human operator is phys-
ically coupled with a typically mechanical system in
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
106

closed-loop, it is important to analyze the passivity of
the closed-loop system.
A two-port network is said to be passive if for
all inputs of energy, the output energy is equal
or less than the input energy. If the network is
not passive, it is active. Raisbeck’s passivity cri-
terion is used to determine the passivity of the system.
Definition: Raisbeck Passivity Criterion for 2-port
Systems: It is said that a 2 port-network is passive if
and only if
1. The parameters of the hybrid matrix H have no
poles in the right half plane
2. Any poles of the elements of the hybrid matrix on
the imaginary axis are simple and their residues
satisfy the following conditions, for all real values
of ω,
• r
11
≥ 0, r
22
≥ 0
• r
11
r
22
− r
12
r
21
≥ 0
• 4Re{h
11
}Re{h
22
} − [Re{h
12
} + Re{h
21
}]
2
−[Im{h
12
} − Im{h
21
}]
2
≥ 0
where r
ij
denotes the residue of h
ij
.
In a similar way, the first two items are satisfied
with positive impedance parameters, and the third is
satisfied if the following inequality is fulfilled
K
2
p
+ K
2
f
− 2K
p
K
f
cos(T
1
+ T
2
)ω ≤ 4ζν (21)
Then absolute stability is a more relaxed stability cri-
teria than passivity. The passivity condition is nec-
essary to assure a complete energetic stability per-
formance of the closed loop system. Thus, we can
choose the dynamic scaling factor in order to have
a greater upper and lower bounds to vary the other
factors of position and force without affect passivity,
because it is of primary interest to maintain passivity
since the human is physically holding the mechanical
master robot.
7 TRANSPARENCY ANALYSIS
In order to determine the transparency of the system,
a quality criterion in teleoperation systems based on
the impedance matrix is derived from equations (9)
and (10),
F
h
F
e
=
Z
11
Z
12
Z
21
Z
22
V
m
V
s
(22)
The elements of the impedance matrix are in function
of desired impedance parameters and scaling factors
as follows
Z
11
=
ξ
s
1+ ζK
p
K
f
e
−(T
m
+T
s
)s
Z
12
= −
ξ
s
K
f
e
−T
s
s
Z
21
=
ξ
s
K
p
e
−T
m
s
Z
22
= −
ξ
s
where
ξ =
¯
M
m
s
2
+
¯
B
m
s+
¯
K
m
The ideal transparency is reached by the system when
the (input) environmentalimpedance Z
e
is equal to the
output human impedance Z
h
, so that, we have
Z
h
= Z
e
(23)
From (22), we have
Z
h
= Z
11
+
Z
12
Z
21
Z
e
+ Z
22
(24)
where Z
11
, Z
22
, Z
12
, Z
21
are the elements of the
impedance matrix Z. Expressing the elements of Z in
terms of the master impedance and substituting them
in (24), it gives
Z
h
= ξ
1+ ζK
p
K
f
e
−(T
m
+T
s
)s
+
ξ
2
K
p
K
f
e
−(T
m
+T
s
)s
Z
e
s
2
− ξs
(25)
Now, we can analyze the transparency of the system
in terms of free motion regime, which means that Z
e
=
0 ideally, and constrained motion regime Z
e
= ∞, in
the worst case, then we have the following:
1. When Z
e
→ 0, Z
h
becomes (25), such that when
the dynamic scaling factor ζ is greater, Z
h
→ 0,
or smaller desired impedance parameters is tuned,
the higher transparency is obtained in free motion
due to
Z
e
→ 0 ⇒ Z
h
→
1
ζ
ξ
s
2. In contact tasks Z
e
→ ∞, ideally so does the output
impedance. In this case, the transparency relation
(24) becomes
Z
h
→ Z
11
=
ξ
s
1+ ζK
p
K
f
e
−(T
m
+T
s
)s
Notice that the dynamic scaling factor ζ is directly
proportional to Z
h
, hence, the greater it is the better
the transparency is.
LIMITS OF HUMAN INTERACTION IN DYNAMICALLY SIMILAR TELEOPERATION SYSTEMS - Under
Unknown Constant Time Delay with Impedance Control
107
8 SIMULATION
In this section the effect of the dynamic scaling is
shown for a 1 DoF teleoperation system. Simulations
were made in 3 cases:
1. All dynamic, kinematic and force scaling factors
are the unit.
2. The scaling factors of position and force are K
p
=
2 and K
f
= 0.01, respectively, and the dynamic
scaling factor is ζ = 0.1.
3. zeta is increased to 10 and the rest of the parame-
ters are preserved as in case 2.
A smooth force profile was introduced arbitrarily
as the force exerted by the human. This force trajec-
tory was designed in such a way that the teleoperator
goes from an initial position to the contact point arriv-
ing softly with null velocity. This is in order to avoid
large spikes due to hard contact. Once the slave robot
is in the contact point, the human begin to apply an
intermittently force on the constraint 3.
0 200 400 600 800 1000 1200
0
0.005
0.01
0.015
0.02
0.025
Time (mS)
Position (mts)
Slave robot position
Master robot position
Figure 2: Position error of the master (dashed line) and
slave (dotted line) for Case 1.
0 200 400 600 800 1000 1200
−0.02
0
0.02
0.04
0.06
0.08
0.1
Time (mS)
Force (N)
Human force
Enviroment force
Figure 3: Human force error (master/dashed line) and con-
straint force error (slave/dotted line) for Case 1.
In Case 1, the chosen scaling factors and the
impedance parameters give us an acceptable perfor-
mance and a stable behavior. The position error be-
tween master and slave in Figure 2 shows that both
robots follow the same constrained trajectory. Due
to the impedance programmed for the master robot
a slight movement toward the constraint is allowed.
However, the slave robot stands along the physi-
cal constraint. With this stable response under con-
0 200 400 600 800 1000 1200
−0.005
0
0.005
0.01
0.015
0.02
0.025
Time (mS)
Position (mts)
Slave robot position
Master robot position
Figure 4: Position error of the master (dashed line) and
slave (dotted line) for Case 2.
0 200 400 600 800 1000 1200
0
0.02
0.04
0.06
0.08
0.1
0.12
Time (mS)
Force (N)
Human force
Enviroment force
Figure 5: Human force error (master/dashed line) and con-
straint force error (slave/dotted line) for Case 2.
strained operation, the scaling factor of position is in-
creased to obtain a larger workspace with slave robot
and the force scaling factor is tuned in order to apply
a greater force profile on the constraint and protect the
human to receive a large reflected force that could be
potentially dangerous.
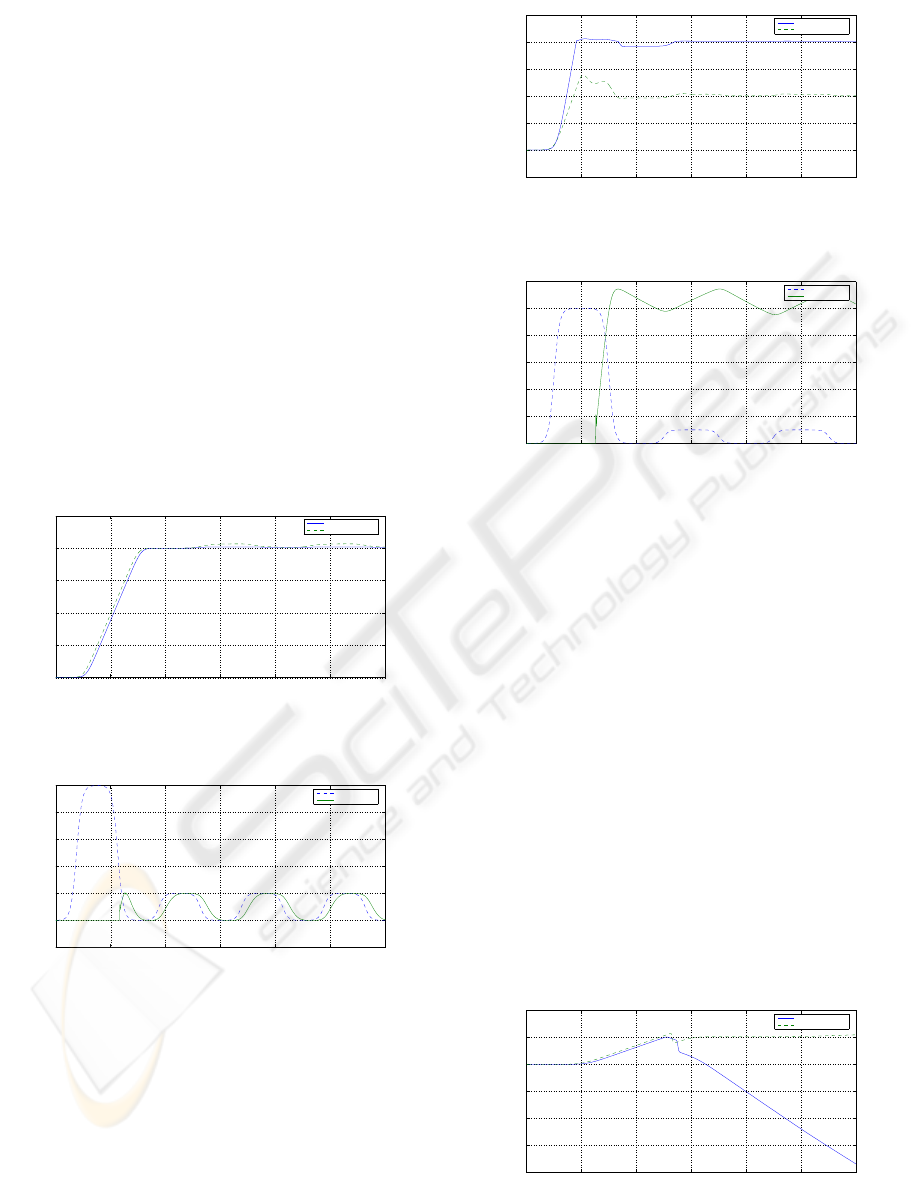
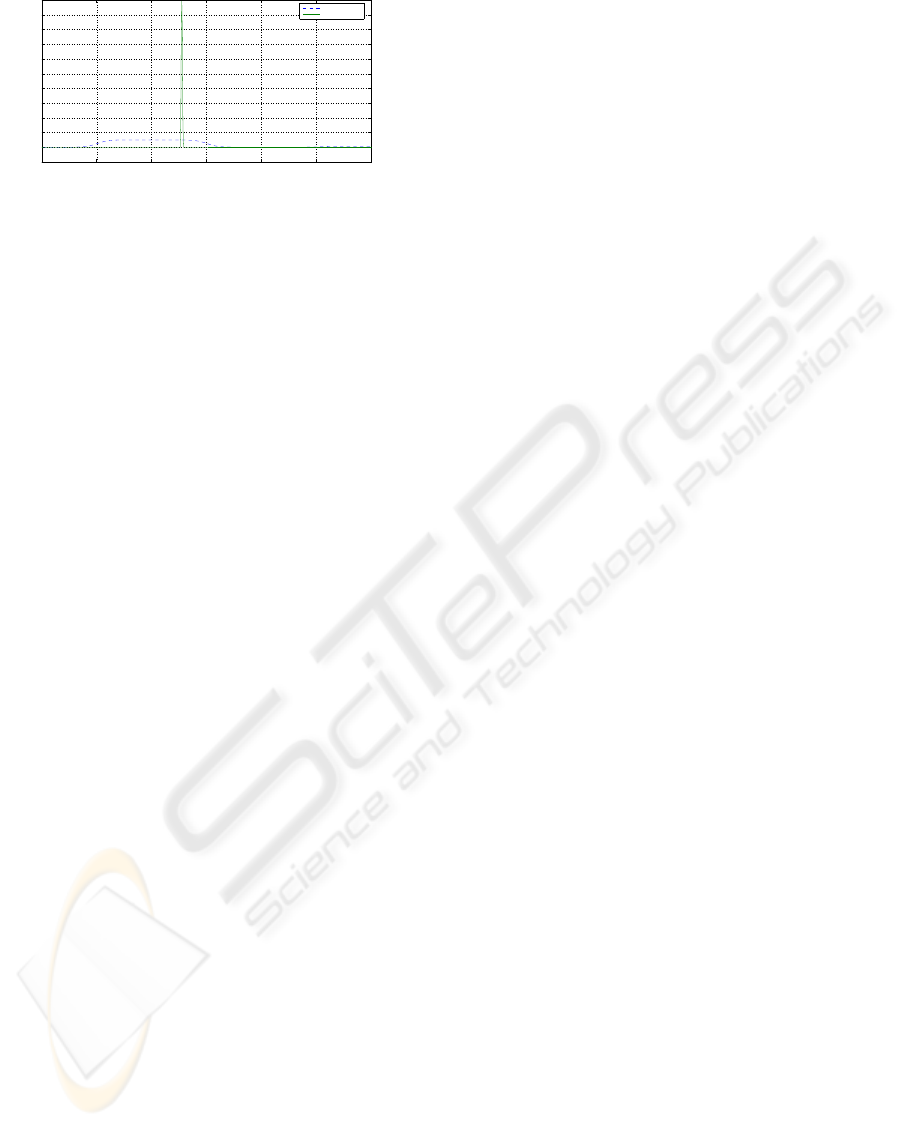
In Case 2, the change described in the scaling fac-
tors make the system unstable. The slave robot go
away from its position as can be seen in Figure 4,
while the force at the constraint (see Figure 5) dis-
appears.
In order to handle this behavior, the dynamic scal-
ing factor is increased (Case 3). Then the slave robot
can reach the scaled position and force as shown in
Figures 6 and 7.
The results in simulation show that in case 1, we
obtain a acceptable performance and a stable behavior
in the system but when we try to increase the perfor-
mance changing the values of the others factors the
0 100 200 300 400 500 600
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
Time (mS)
Position (mts)
Slave robot position
Master robot position
Figure 6: Position error of the master (dashed line) and
slave (dotted line) for Case 3.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
108
0 100 200 300 400 500 600
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time (mS)
Force (N)
Human force
Enviroment force
Figure 7: Human force error (master/dashed line) and con-
straint force error (slave/dotted line) for Case 3.
stability of the system is affected (Case 2). By mak-
ing a new choice on this dynamic scaling factor we
can preserve the scaling factors already chosen for an
specific task without affect the stability
9 CONCLUSIONS
Using a novel impedance controller and advanced sta-
bility tools, precise conditions to guarantee stability,
even in harsh conditions, is proposed for dynamically
similar bilateral teleoperation robotic system. In this
case, this system depends on a constant parameter,
which relates explicitly and clearly a trade off be-
tween stability, passivity and transparency. The con-
troller enforces convergence in finite time due to the
sliding surface, which is nothing but the impedance
equation, thus the closed-loop system dynamics is en-
tirely governed by the desired controlled equation.
This yields useful boundariesto varyimpedance, scal-
ing parameters and frequency,in terms of the bounded
ime delay, which in turn allows to introduce a desired
performance criteria in terms of surrounding physical
conditions. This result seemingly allows to establish
a simpler methodology to design dynamically simi-
lar teleoperators with a given desired performance in
realistic conditions.
REFERENCES
Cho, H. and Park, J. (2002). Impedance controller design
of internet-based teleoperation using absolute stability
concept. In IEEE Int.Conf. on Intelligent Robots and
Systems, pages 2256–2261.
Garcia-Valdovinos, L. G. (2006). Teleoperadores Bilat-
erales No Lineales de Impedancia Convergente con
Ambiente Semiestructurado. Phd. thesis, CINVES-
TAV.
Goldfarb, M. (1999). Similarity and invariance in scaled
bilateral telemanipulation. ASME J. Dynam. Syst.,
Meas., Contr., volume 121:79–87.
Hokayem, P. and Spong, M. (1984). Bilateral teleoperation:
An historical survey. IEEE Control System Magazine,
volumen 4:30–34.
K. Hashtrudi-Zaad, S. S. (2000). Analysis and evaluation of
stability and performance robustness for teleoperation
control architectures. In IEEE Int.Conf. on Intelligent
Robotics and Automation, pages 3107–3113.
Li, P. and Lee, D. (2003). Passive bilateral feedforward
control of linear dynamically similar teleoperated ma-
nipulators. In IEEE Transactions on Robotic and Au-
tomation, volume volume 19, pages 443–456.
Llewellyn, F. (1952). Some fundamental properties of trans-
mission systems. In Proc. IRE, volume volume 40,
pages 271–283.
Q.W. Deng, Q. Wei, Z. L. (2007). Analysis of absolute sta-
bility for time-delay teleoperation systems. The Inter-
national Journal of Automation and Computing, pages
203–207.
Raisbeck, G. (1994). A definition of passive linear met-
works in terms of time and energy. J. of Applied
Physics, volume 25.
LIMITS OF HUMAN INTERACTION IN DYNAMICALLY SIMILAR TELEOPERATION SYSTEMS - Under
Unknown Constant Time Delay with Impedance Control
109
