
ON THE STATE–SPACE REALIZATION OF VECTOR
AUTOREGRESSIVE STRUCTURES
An Assessment
Vasilis K. Dertimanis, Dimitris V. Koulocheris
Vehicles Laboratory, National Technical University of Athens, Iroon Politechniou 9, 157 80, Athens, Greece
Keywords:
Vector autoregressive, Time–series, State–space, Green function, Covariance matrix, Dispersion analysis, Es-
timation.
Abstract:
This study explores the interconnection between vector autoregressive (VAR) structures and state–space mod-
els and results in a compact framework for the representation of multivariate time–series, as well as the esti-
mation of structural information. The corresponding methodology that is developed, applies the fact that every
VAR process of order n may be described by an equivalent (non–unique) VAR model of first order, which is
identical to a state–space realization. The latter uncovers many ”hidden” information of the initial model, it
is more easy to manipulate and maintains significant second moments’ information that can be reflected back
to the original structure with no effort. The performance of the proposed framework is validated using vector
time–series signatures from a structural system with two degrees of freedom, which retains a pair of closely
spaced vibration modes and has been reported in the relevant literature.
1 INTRODUCTION
The analysis of vector time–series, generally referring
to the determination of the dynamics that govern the
performance of a system under unobservable excita-
tions, has been a subject of constant development for
more than two decades, as part of the broader system
identification framework. Relative applications are
extended from econometrics (Clements and Henry,
1998; L¨utkepohl, 2005), to dynamics (Ljung, 1999;
Koulocheris et al., 2008), vibration (Papakos and Fas-
sois, 2003), modal analysis (Huang, 2001) and fault
diagnosis (Dertimanis, 2006).
The study of vector time–series can be assessed
from a variety of viewpoints, with respect to the ap-
plication of interest. These include simulation, pre-
diction and extraction of structural information. Yet,
while in the first two areas the interrelation of the cor-
responding time–series structures, such as the VAR
one (or the VARX and the VARMAX, under the
availability of input information), to equivalent state–
space models has been studied extensively (Hannan,
1976; Brockwell and Davis, 2002; L¨utkepohl, 2005),
not much have been done in the third (Lardies, 2008),
from where it appears that state–space realizations
may provide significant advantages, regarding struc-
tural estimation, with respect to other approaches (He
and Fu, 2001).
This paper attempts to provide a unified frame-
work for the representation of vector time–series, by
means of VAR structures and their corresponding
state–space realizations. Based on the fact that ev-
ery VAR structure of order n (referred to from now on
as VAR(n) structure) can be expressed as an equiva-
lent (and non–unique) VAR(1) one, a corresponding
state–space model is developed. This specific model
qualifies, over other possible realizations, for having
a transition matrix that coincides with the VAR(n)
polynomial matrix. It turns out that the spectrum of
this transition matrix has all the structural information
about the system that generates the time–series ”hid-
den” in its spectrum. Consequently, by taking advan-
tage standard results of matrix algebra, closed form
expressions for the Green function and the covariance
matrix are derived. The latter, unlike other estimation
schemes, such as the Burg and the forward–backward
methods (Brockwell and Davis, 2002), is by definition
closely related to the energy distribution of the vec-
tor time–series. Thus, the corresponding expression
that is assessed, quantifies the impact of each specific
structural mode in the total energy of the system, a
technique that has been recorded in the literature as
20
K. Dertimanis V. and V. Koulocheris D. (2009).
ON THE STATE–SPACE REALIZATION OF VECTOR AUTOREGRESSIVE STRUCTURES: AN ASSESSMENT.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 20-27
DOI: 10.5220/0002188100200027
Copyright
c
SciTePress

dispersion analysis (Lee and Fassois, 1993).
The paper is organized as follows: in Sec. 2 the
VAR(n) structure is presented and the reduction to the
state–space realization is performed. Section 3 illus-
trates the properties of the state–space model, includ-
ing the development of closed form representations
for the Green function and the covariance matrix, and
how these are reflected to the original VAR(n) struc-
ture. Section 4 contains the least–squares estimation
of the state equation and Sec. 5 the validation of the
estimated model, as well as the extraction of the struc-
tural information that is ”hidden” in the transition ma-
trix. Section 6 displays an application of the proposed
framework to a simulated vibrating system that has
been already used in the past (Lee and Fassois, 1993;
Fassois and Lee, 1993) and in Sec. 7 the method is
concluded and some remarks for further research are
outlined.
2 THE VAR(n) STRUCTURE
2.1 The Model
Let Y[t] =
h
y
1
[t] y
2
[t] ... y
s
[t]
i
T
denote a s–
dimensional vector time–series of zero mean random
variables
1
. Under the stationarity assumption (Box
et al., 2008), Y[t] can be described by a finite order
VAR model of the following form:
Y[t] + A
1
·Y[t −1] + ... + A
n
·Y[t −n] = Z[t] (1)
In the above equation n is the order of the VAR pro-
cess, A
j
designate the [s×s] AR matrices and Z[t] de-
scribes a vector white noise process with zero mean,
µ
µ
µ
Z
≡ E
n
Z[t]
o
= 0 (2)
and covariance function,
Γ
Γ
Γ
Z
[h] ≡ E
n
Z[t + h]·Z
T
[t]
o
=
(
Σ
Σ
Σ
Z
h = 0
0 h 6= 0
(3)
where Σ
Σ
Σ is a non–singular (and generally non–
diagonal) matrix.
Taking advantage of the backshift operator q, de-
fined such that q
−k
·Y[t] = Y[t −k], the VAR(n) struc-
ture can be compactly written as,
A(q)·Y[t] = Z[t] (4)
where A(q) is the [s×s] AR polynomial matrix:
A(q) = I
s
+ A
1
·q
−1
+ ... + A
n
·q
−n
(5)
1
Throughout the paper, quantities in the brackets shall
notate discrete–time units (or time lags, in the case of co-
variance functions) and hats shall notate estimators / esti-
mates. E{·} shall notate expectation.
2.2 Reduction to State–space
Any VAR(n) process of Eq. 1 can be transformed to an
equivalent VAR(1) structure (L¨utkepohl, 2005). De-
fine the [n·s×1] vectors,
Ξ
Ξ
Ξ[t] =
Y[t −n + 1]
Y[t −n + 2]
.
.
.
Y[t −1]
Y[t]
N
N
N[t] =
0
0
.
.
.
0
Z[t]
(6)
and the [n·s×n·s] and [s×n·s] matrices,
F =
O
s
I
s
... O
s
O
s
O
s
... O
s
... ...
.
.
.
.
.
.
O
s
O
s
... I
s
−A
n
−A
n−1
... −A
1
(7)
C =
O
s
O
s
... I
s
(8)
respectively, Eq. 1 can take the following form:
Ξ
Ξ
Ξ[t] = F·Ξ
Ξ
Ξ[t −1] + N
N
N[t] (9)
Y
Y
Y[t] = C·Ξ
Ξ
Ξ[t] (10)
Equations 9–10 illustrate the state–space realization
of the VAR(n) structure of Eq. 1. Naturally, the state–
space model consists of a state equation (Eq. 9), in
which F is the state transition matrix, and an obser-
vation equation (Eq. 10) that relates the original s–
variate time–series Y[t] to the state vector, Ξ
Ξ
Ξ[t], by
means of the output matrix C. Obviously, the state
equation can be viewed as a VAR(1) model, in which
Ξ
Ξ
Ξ[t] is a well–defined stationary stochastic process
and N[t] has properties similar to that of Z[t], as it
will become clear at the following.
It must be noted that the state–space realization
of Eq. 1 is not unique (Lardies, 2008). In fact they
exist infinitely many pairs {F,C} that can describe
Y[t] in terms of Eqs. 9–10, since any transformation
of the state vector by a non–singular [n·s ×n·s] ma-
trix T leads to new state equation, in which the transi-
tion matrix T·F·T
−1
is similar to F and preserves its
eigenvalues (Meyer, 2000). Yet, Eq. 1 has a very im-
portant property: the transition matrix F, as defined
in Eq. 7, is the block companion matrix of the poly-
nomial matrix A(q) described by Eq. 5 and includes
all the structural information of interest, regarding the
process that generates the s–variate time–series Y[t].
ON THE STATE-SPACE REALIZATION OF VECTOR AUTOREGRESSIVE STRUCTURES: AN ASSESSMENT
21

3 PROPERTIES OF THE
STATE–SPACE REALIZATION
3.1 Noise
From Eqs. 6, 8, it holds that,
N[t] = C
T
·Z[t] (11)
so the mean value and the covariance matrix of N[t]
are given by,
µ
µ
µ
N
≡ E
n
N[t]
o
= C
T
·E
n
Z[t]
o
= 0 (12)
and,
Γ
Γ
Γ
N
[h] ≡ E
n
N[t + h]·N
T
[t]
o
= E
n
C
T
·Z[t + h]·Z
T
[t]·C
o
= C
T
·E
n
Z[t + h]·Z
T
[t]
o
·C
= C
T
·Γ
Γ
Γ
Z
[h]·C (13)
leading to,
Γ
Γ
Γ
N
[h] =
(
Σ
Σ
Σ
N
h = 0
0 h 6= 0
(14)
where Σ
Σ
Σ
N
= C
T
·Σ
Σ
Σ
Z
·C.
3.2 State Vector
Since the state transition equation reflects the prop-
erties of an observed dynamic system, the output of
which is the available s–variate time–series Y[t], it
is desirable to obtain corresponding mathematical ex-
pressions that assess and quantify the relative infor-
mation. Conventional time–series analysis usually is
led to infinite, or recursive expressions for the repre-
sentation / calculation of valuable quantities, such as
the weighting function (referred to also as Greenfunc-
tion, process generating function, or transfer func-
tion) and the covariance matrix. The analysis that
follows leads to closed form representations, which
reveal the spectral characteristics of the transition ma-
trix F.
3.2.1 The Green Function
Starting from the VAR(1) state equation,
Ξ
Ξ
Ξ[t] = F·Ξ
Ξ
Ξ[t −1] + N
N
N[t] (15)
it can be written as an infinite vector moving average,
Ξ
Ξ
Ξ[t] =
∞
∑
k=0
F
k
·N
N
N[t −k] (16)
which is a multivariate generalization of Wold’s the-
orem (Box et al., 2008). Without loss of generality,
assuming that F has a complete set of eigenvalues
λ
1
,λ
2
,...,λ
n·s
, it can be expressed as,
F =
n·s
∑
j=1
G
j
·λ
j
(17)
where G
k
are the spectral projectors of F (refer to
the Appendix for a brief introduction to the spectral
properties of square matrices). The substitution of
Eq. 17 to Eq. 16, using the fact that G
k
j
= G
j
and
G
i
·G
j
= 0, i 6= j, yields,
Ξ
Ξ
Ξ[t] =
∞
∑
k=0
h
n·s
∑
j=1
G
j
·λ
j
i
k
·N
N
N[t −k]
=
∞
∑
k=0
n·s
∑
j=1
G
j
·λ
k
j
·N
N
N[t −k]
=
∞
∑
k=0
H
Ξ
Ξ
Ξ
[k]·N
N
N[t −k] (18)
so that the coefficients of the weighting (Green) func-
tion can be expressed in a closed form as,
H
Ξ
Ξ
Ξ
[k] ≡ F
k
=
n·s
∑
j=1
G
j
·λ
k
j
(19)
in terms of the spectrum of F. Notice that by defi-
nition (Eq. 16), H
Ξ
Ξ
Ξ
[k] can be viewed as the impulse
response of the state difference equation, which gen-
erally has a decaying performance, characterized by
a mixture of damped exponentials and cosines, as for
example in vibrating systems, where the eigenvalues
λ
k
often appear in complex conjugate pairs. Further-
more it holds that (see Appendix):
H
Ξ
Ξ
Ξ
[0] =
n·s
∑
j=1
G
j
= I (20)
3.2.2 The Covariance Matrix
The covariance matrix related to the Wold decompo-
sition of the state equation is (Brockwell and Davis,
2002):
Γ
Γ
Γ
Ξ
Ξ
Ξ
[h] =
∞
∑
k=0
F
k+h
·Σ
Σ
Σ
N
·
F
k
T
(21)
Using Eq. 17, the following apply:
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
22

Γ
Γ
Γ
Ξ
Ξ
Ξ
[h] =
=
∞
∑
k=0
(
h
n·s
∑
j=1
G
j
·λ
j
i
k+h
·Σ
Σ
Σ
N
·
nh
n·s
∑
m=1
G
m
·λ
m
i
k
o
T
)
=
∞
∑
k=0
(
n·s
∑
j=1
G
j
·λ
k+h
j
·Σ
Σ
Σ
N
·
n·s
∑
m=1
G
T
m
·λ
k
m
)
=
∑
j
∑
m
G
j
·Σ
Σ
Σ
N
·G
T
m
·λ
h
j
·
∞
∑
k=0
λ
k
j
·λ
k
m
=
∑
j
∑
m
G
j
·Σ
Σ
Σ
N
·G
T
m
·λ
h
j
·
1
1−λ
j
·λ
m
=
n·s
∑
j=1
G
j
·Σ
Σ
Σ
N
·
n·s
∑
m=1
G
T
m
·
1−λ
j
·λ
m
·λ
h
j
(22)
Setting,
D
j
= G
j
·Σ
Σ
Σ
N
·
n·s
∑
m=1
G
T
m
·
1−λ
j
·λ
m
(23)
the covariance matrix can be expressed as:
Γ
Γ
Γ
Ξ
Ξ
Ξ
[h] =
n·s
∑
j=1
D
j
·λ
h
j
(24)
Equation 24 has some important features. First, as
become directly evident, it has the same form as the
Green function. Second, it describes the covariance
matrix in terms of the spectral properties of the tran-
sition matrix (plus the noise covariance), which, as
already mentioned, contains all the information about
the dynamics that produce the state vector and, thus,
Y[t]. This fact leads to a third crucial feature: for
h = 0, Eq. 24 yields:
Γ
Γ
Γ
Ξ
Ξ
Ξ
[0] = D
1
+ D
2
+ ···+ D
n·s
(25)
Recalling that Γ
Γ
Γ
Ξ
Ξ
Ξ
[0] can be treated as the multivari-
ate equivalent of the variance (in fact its diagonal ele-
ments are the variances of each entry of Ξ
Ξ
Ξ[t]), Eq. 25
can be used as a direct measure of the significance that
every eigenvalue has, in the total energy of the vector
time–series. This leads to the notion of dispersion
analysis, originated in the work of (Lee and Fassois,
1993), in which the estimated modal characteristics
of a vibrating system are qualified against some pre-
defined thresholds. In the next section, a more practi-
cal version of Eq. 25 is presented, with respect to the
estimation problem.
In the case that the correlation matrix is of interest,
it can be calculated from (Box et al., 2008),
R
Ξ
Ξ
Ξ
[h] = V
−1/2
Ξ
Ξ
Ξ
·Γ
Γ
Γ
Ξ
Ξ
Ξ
[h] ·V
−1/2
Ξ
Ξ
Ξ
(26)
where V
Ξ
Ξ
Ξ
is a diagonal matrix that contains the auto-
correlations at zero lag:
V
−1/2
Ξ
Ξ
Ξ
= diag
γ
−1/2
11
[0],...,γ
−1/2
n·s
[0]
(27)
3.3 Output Time–series
The previous analysis explored the advantages of the
state equation and led to closed form representations
for the coefficients of the Green function and the co-
variance matrix, which are exclusively depend on the
spectrum of the transition matrix F. Naturally, there
exist strong connections between these quantities and
the corresponding ones of the s–variate time–series
Y[t]. The link is just the output equation of the state–
space model. The substitution of Eq. 16 to Eq. 10,
under the result of Eq. 19, yields,
Y[t] = C·Ξ
Ξ
Ξ[t] = C·
∞
∑
k=1
F
k
·N
N
N[t −k]
=
∞
∑
k=0
C·H
Ξ
Ξ
Ξ
[k]·C
T
·Z
Z
Z[t −k]
=
∞
∑
k=0
H
Y
[k] ·Z
Z
Z[t −k] (28)
where:
H
Y
[k] = C·H
Ξ
Ξ
Ξ
[k]·C
T
=
n·s
∑
j=1
C·G
j
·C
T
·λ
k
j
=
n·s
∑
j=1
Ω
Ω
Ω
j
·λ
k
j
(29)
The covariance matrix of Y[t] is:
Γ
Γ
Γ
Y
[h] ≡ E
n
Y[t + h]·Y
T
[t]
o
=
=
∞
∑
k=0
H
Y
[k+ h] ·Σ
Σ
Σ
Z
·H
T
Y
[k] (30)
Recalling that,
Σ
Σ
Σ
N
= C
T
·Σ
Σ
Σ
Z
·C (31)
and
H
Y
[k] = C·H
Ξ
Ξ
Ξ
[k]·C
T
(32)
the following apply:
Γ
Γ
Γ
Y
[h] =
∞
∑
k=0
C·H
Ξ
Ξ
Ξ
[k+ h]·C
T
·Σ
Σ
Σ
Z
·C·H
T
Ξ
Ξ
Ξ
[k]·C
T
= C·
(
∞
∑
k=0
H
Ξ
Ξ
Ξ
[k+ h]·Σ
Σ
Σ
N
·H
T
Ξ
Ξ
Ξ
[k]
)
·C
T
= C·Γ
Γ
Γ
Ξ
Ξ
Ξ
[h] ·C
T
(33)
Thus, from Eq. 24,
Γ
Γ
Γ
Y
[h] =
n·s
∑
j=1
Q
j
·λ
h
j
(34)
ON THE STATE-SPACE REALIZATION OF VECTOR AUTOREGRESSIVE STRUCTURES: AN ASSESSMENT
23

where,
Q
j
= C·D
j
·C
T
(35)
while if the correlation matrix R
Y
[h] is needed, corre-
sponding versions of Eqs. 26– 27 apply to Eq. 34 as
well.
Equations 29 and 34 show how the properties of
the s–variate time–series Y[t] are related to the transi-
tion matrix. It is important to observe that the above
analysis is strictly depended on the spectrum of F. In-
deed, when the VAR(n) structure described by Eq. 1
is available, all the information about the dynamics
of the system that produces Y[t] can be assessed by
the eigenvalue problem of F, the state transition ma-
trix of the state–space realization, which is identical to
the block companion matrix of the polynomial matrix
A(q). Of course, no VAR structure exists a–priori for
an available data set and it rather has to be estimated.
This is the topic of the next Section.
4 ESTIMATION
The estimation of VAR(n) structures pertains to the
identification of the polynomial matrix order and co-
efficients, as well as the covariance matrix of the vec-
tor noise sequence, given observations of a s–variate
times–series Y[t], t = 1,...,N, that has been sampled
at a period T
s
. To this, the state–space realization may
again be utilized, noting that, regardless the selected
order n of the original VAR structure, the state equa-
tion retains the first order VAR form. In addition,
Eq. 15 can be written as a linear regression,
Ξ
Ξ
Ξ[t] = Φ
Φ
Φ[t]·f
f
f + N[t] (36)
with,
Φ
Φ
Φ[t] = −Ξ
Ξ
Ξ
T
[t −1] ⊗I
n·s
[n·s×n·s
2
] (37)
f
f
f = vec
F
[n·s
2
×1] (38)
where ⊗ denotes Kronecker’s product and vec{·} the
vector that is produced by stacking the columns of the
relative matrix, one underneath the other. Introduc-
ing,
Ξ
Ξ
Ξ =
h
Ξ
Ξ
Ξ
T
[1] ... Ξ
Ξ
Ξ
T
[N]
i
T
[N·n·s×1] (39)
Φ
Φ
Φ =
h
Φ
Φ
Φ[1] ... Φ
Φ
Φ[N]
i
T
[N·n·s×n·s
2
] (40)
N =
h
N
T
[1] ... N
T
[N]
i
T
[N·n·s×1] (41)
the minimization of the quadratic norm,
V( f
f
f) =
1
2
·N
T
·Λ
Λ
Λ·N (42)
where N = Ξ
Ξ
Ξ −Φ
Φ
Φ·f
f
f and Λ
Λ
Λ any arbitrary weight-
ing matrix (the covariance of the residual vector N
is presently utilized, calculated as I
N
⊗
b
Σ
Σ
Σ
−1
N
), leads
to the well-known normal equations for the least–
squares estimation of f
f
f,
Φ
Φ
Φ
T
·Φ
Φ
Φ·
b
f
f
f = Φ
Φ
Φ
T
·Ξ
Ξ
Ξ (43)
whereas the covariance matrix associated with the es-
timate of Eq. 43 is:
P =
Φ
Φ
Φ
T
·Λ
Λ
Λ·Φ
Φ
Φ
−1
(44)
The diagonal entries of P are the variances of the pa-
rameter vector f
f
f. Thus, assuming normality (pro-
vided that N ≫ n·s
2
), the 95% confidence limits are
derived from
ˆ
f
j
±1.96·σ
j
for j = 1,... , n·s
2
. Note
that if the zero value is contained in this interval, the
relative parameter can be regarded as zero.
Having the state equation estimated, the transition
to the original VAR(n) structure is designated by the
matrix C of the state–space realization’s output equa-
tion. To this, the transformation methods that were
implied in Sec. 3 are applied.
5 VALIDATION
The vector time–series fitting strategy consists of
finding an appropriate estimate of the order n, as
well as of exploring the properties of the innovations,
Z[t]. Both may be qualified via minimization of the
Bayesian Information Criterion (BIC), defined as,
BIC = ln det |
b
Σ
Σ
Σ
Z
|+ n·s
2
ln N
N
(45)
while the innovations can be further tested for white-
ness, using standard hypothesis tests. See (Papakos
and Fassois, 2003) for details.
Once the final model has been available, com-
plete structural information can be assessed in terms
of the estimated transition matrix. Towards this, the
spectrum of
b
F is calculated, namely the eigenvalues
and the eigenvectors, while using Eq. 34, the relative
importance of each structural mode, within the total
energy of the system is evaluated. With respect to
the discussion that took place in Sec. 3.2.2, regarding
the notion of the dispersion analysis, setting h = 0 in
Eq. 34 yields:
Γ
Γ
Γ
Y
[0] = Q
1
+ Q
2
+ ···+ Q
n·s
(46)
Let γ
ij
be the [i, j] element of Γ
Γ
Γ
Y
[0]. Then,
γ
ij
= q
1 ij
+ q
2 ij
+ ···+ q
n·s ij
(47)
and since the eigenvalues of the transition matrix usu-
ally come as a mixture of real and complex conjugate
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
24

Figure 1: A structural system with two degrees of free-
dom: m
1
= m
2
= 4.5 kg, c
1
= 45 Ns/m, c
2
= 35 Ns/m,
c
3
= 15 Ns/m, k
1
= k
3
= 17500 N/m, k
2
= 100 N/m
numbers, the structural dispersions within the content
of the [i, j] covariance estimate are defined as:
Real mode:
δ
ij k
= q
ij k
(48)
Complex mode:
δ
ij k
= q
ij k
+ q
∗
ij k
(49)
Thus, the relative importance of each dispersion in the
[i, j] covariance estimate is:
∆
ij k
=
δ
ij k
γ
ij
×100% (50)
This procedure allows the determination of the contri-
bution of the k
th
identified mode in every element of
the covariance matrix, by building corresponding ∆
∆
∆
k
,
which store the relative normalized dispersions ∆
ij k
.
6 EXPERIMENTAL VALIDATION
The method’s performance was examined through the
structural identification problem of a vibrating system
with two degrees of freedom, presented in Fig. 1. The
system is characterized by a pair of closely spaced
modes, as indicated in Tab. and the vector time–series
used for the identification tasks was the vibration dis-
placement of the masses. The statistical consistency
of the method was investigated via Monte Carlo anal-
ysis that consisted of 20 data records of vibration dis-
placement time–series (with each such record having
1000 samples, see Fig. 2 for a single realization and
Fig. 3 for its covariance matrix), obtained with dif-
ferent white excitations and noise–corrupted at 5%
noise to signal (N/S) ratio. Regarding the simula-
tion, the continuous system was discretized using the
impulse–invariant transformation, at a sampling pe-
riod T
s
= 0.025 s.
0 5 10 15 20 25
−2
−1
0
1
2
Time (s)
x
1
[t]
Vibration displacement time−series
0 5 10 15 20 25
−2
−1
0
1
2
Time (s)
x
2
[t]
Figure 2: A realization of the noise corrupted (at 5% N/S
ratio) vibration displacement time–series.
0 20 40
−1
−0.5
0
0.5
1
TS 1
lag τ
ACF
0 20 40
−1
−0.5
0
0.5
1
TS 1 x TS 2
lag τ
CCF
0 20 40
−1
−0.5
0
0.5
1
TS 2 x TS 1
lag τ
CCF
0 20 40
−1
−0.5
0
0.5
1
TS 2
lag τ
ACF
Figure 3: The correlation matrix of the series in Fig. 2 for
50 lags. TS1: x
1
[t], TS2: x
2
[t], ACF: autocorrelation, CCF:
cross–correlation.
Following the estimation procedure described in
Sec. 5, a VAR(2) structure was found adequate to de-
scribe system dynamics. Table 1 illustrates the esti-
mates of the natural frequencies and the damping ra-
tios (in fact the corresponding mean values and the
standard deviations of the Monte Carlo simulation),
together with the theoretical ones, from where it is
clear that the method performed satisfactory and iden-
tified the relative quantities, even in the absence of the
input excitations. Table 1 further displays the percent-
age dispersion matrices for each mode of vibration,
showing that the second mode is a heavier contributor
in the total energy of the system. This result coincides
with the previous assessment of the specific simulated
system, reported in (Fassois and Lee, 1993).
For further validation of the results, Figs. 4–5 dis-
play the theoretical correlationmatrix of the estimated
model for the vector time–series of Fig. 1 and the
sample correlation matrix of the innovations, for the
ON THE STATE-SPACE REALIZATION OF VECTOR AUTOREGRESSIVE STRUCTURES: AN ASSESSMENT
25
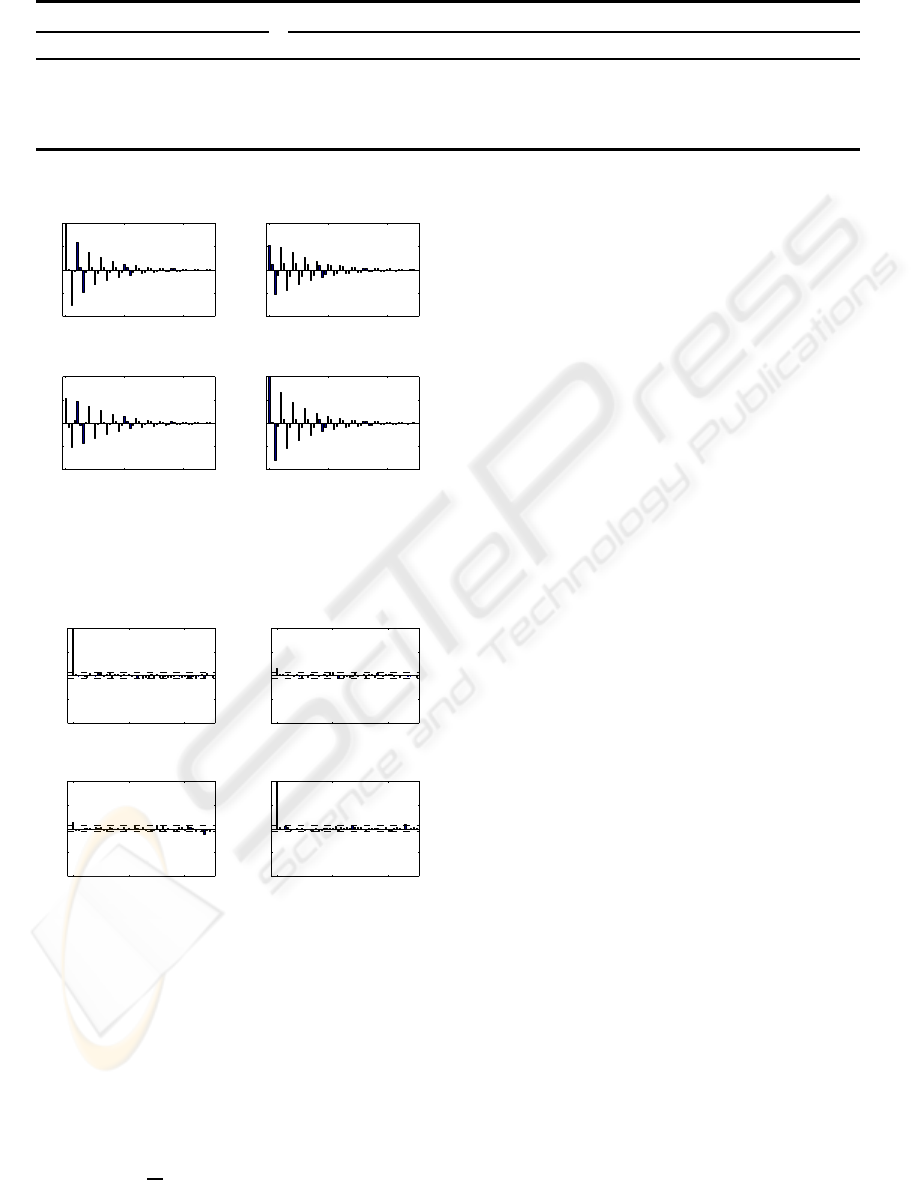
Table 1: Theoretical / identified natural frequencies (Hz) and damping ratios and dispersions of the identified VAR(n) struc-
ture.
Dispersion matrices (%)
Theoretical Identified 1
st
Mode
2
nd
Mode
w
n
9.9793 9.9903±0.1446
37.68±5.06 −32.95±8.82
−37.01±10.18 9.58±2.73
62.32±5.06 132.95±8.82
137.01±10.18 90.42±2.73
9.9274 9.9307±0.0636
ζ 0.1826 0.1848±0.0174
0.0480 0.0477±0.0073
0 20 40
−1
−0.5
0
0.5
1
TS 1
lag τ
ACF
0 20 40
−1
−0.5
0
0.5
1
TS 1 x TS 2
lag τ
CCF
0 20 40
−1
−0.5
0
0.5
1
TS 2 x TS 1
lag τ
CCF
0 20 40
−1
−0.5
0
0.5
1
TS 2
lag τ
ACF
Figure 4: Theoretical correlation matrix: estimated model
for the series in Fig. 2 (50 lags). Notation is the same as in
Fig. 3.
0 20 40
−1
−0.5
0
0.5
1
TS 1
lag τ
ACF
0 20 40
−1
−0.5
0
0.5
1
TS 1 x TS 2
lag τ
CCF
0 20 40
−1
−0.5
0
0.5
1
TS 2 x TS 1
lag τ
CCF
0 20 40
−1
−0.5
0
0.5
1
TS 2
lag τ
ACF
Figure 5: Sample correlation matrix: innovations of the es-
timated model for the series in Fig. 2 (50 lags). Notation is
the same as in Fig. 3.
same model. The estimated theoretical correlation is
very accurate, it follows its sample counterpart and
exhibits a damped sinusoidal behavior, as a result of
the identified complex conjugate eigenvalues of the
transition matrix. In addition, the sample correlations
of the innovations satisfy the whiteness hypothesis
test, at a 95% level of significance, since they are kept
within the 1.96/
√
N thresholds (Fig. 5, dash lines).
7 CONCLUSIONS
A novel method for the representation of vector time–
series, by means of VAR(n) structures, was presented
in this paper. Focusing on the estimation of struc-
tural information, the method takes advantage of the
fact that every VAR(n) structure can be turn into a
VAR(1) counterpartand is led to a state–space realiza-
tion, whose transition matrix coincides with the block
companion matrix of the VAR polynomial. Conse-
quently, it is shown how important quantities of the
original VAR(n) structure, such as the Green function
and the covariance matrix, can be qualified and as-
sessed only in terms of the spectrum of the transition
matrix. This fact provides the user with the ability
to accurately evaluate the significance of every struc-
tural mode in the total vector time–series energy (a
technique referred to as dispersion analysis). Of the
advantages of the method is the avoidance of itera-
tive iteration schemes and the estimation of a unique
structure for a given data set.
The encouraging results (reduced data acquisition,
statistical consistency, accurate structural identifica-
tion, no overdetermination, unique estimate) suggest
the further research into this field. Extension of the
method to vector time–series with structural indices
governed by multiple eigenvalues, probably by means
of Jordan canonical forms, as well as the investiga-
tion of VARMA models, ensues straightly. Of main
interest is also the application of the method under
the availability of input excitation and the expansion
of its framework to non–stationaryvector time–series,
to closed–loop operations, as well as to fault diagno-
sis schemes.
REFERENCES
Box, G., Jenkins, G., and Reinsel, G. (2008). Time Series
Analysis, Forecasting and Control. Prentice–Hall In-
ternational, New Jersey, 4
th
edition.
Brockwell, P. and Davis, R. (2002). Introduction to Time
Series and Forecasting. Springer–Verlag, New York.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
26

Clements, M. and Henry, D. (1998). Forecasting Economic
Time Series. Cambridge University Press, Cam-
bridge.
Dertimanis, V. (2006). Fault Modeling and Identification
in Mechanical Systems. PhD thesis, School of Me-
chanical Engineering, GR 157 80 Zografou, Athens,
Greece. In greek.
Fassois, S. and Lee, J. (1993). On the problem of stochas-
tic experimental modal analysis based on multiple–
excitation multiple–response data, Part II: The modal
analysis approach. Journal of Sound and Vibration,
161(1):57–87.
Hannan, E. (1976). The identification and parameterization
of ARMAX and state space forms. Econometrica,
44(4):713–723.
He, J. and Fu, Z.-F. (2001). Modal Analysis. Butterworth–
Heinemann, Oxford.
Huang, C. (2001). Structural identification from ambient
vibration using the multivariate AR model. Journal
of Sound and Vibration, 241(3):337–359.
Koulocheris, D., Dertimanis, V., and Spentzas, C. (2008).
Parametric identification of vehicle structural charac-
teristics. Forschung im Ingenieurwesen, 72(1):39–51.
Lardies, J. (2008). Relationship between state–space and
ARMAV approaches to modal parameter identifica-
tion. Mechanical Systems and Signal Processing,
22(3):611–616.
Lee, J. and Fassois, S. (1993). On the problem of stochas-
tic experimental modal analysis based on multiple–
excitation multiple–response data, Part I: Dispersion
analysis of continuous–time systems. Journal of
Sound and Vibration, 161(1):57–87.
Ljung, L. (1999). System Identification: Theory for the
User. Prentice–Hall International, New Jersey, 2
nd
edition.
L¨utkepohl, H. (2005). New Introduction to Multiple Time
Series Analysis. Springer–Verlag, Berlin.
Meyer, C. (2000). Matrix Analysis and Applied Linear
Algebra. Society for Industrial and Applied Mathe-
matics, Philadelphia.
Papakos, V. and Fassois, S. (2003). Multichannel identifica-
tion of aircraft skeleton structures under unobservable
excitations: A vector AR/ARMA framework. Me-
chanical Systems and Signal Processing, 17(6):1271–
1290.
APPENDIX: MATRIX SPECTRUM
Every [n×n] matrix A with spectrum,
σ(A) = {λ
1
,λ
2
,...,λ
k
}, k ≤ n (51)
has the following properties (Meyer, 2000):
- It is similar to a diagonal matrix.
- It retains a complete linearly independent set of
eigenvectors.
- Every λ
j
is semi–simple.
Any such matrix can be written as,
A = λ
1
·G
1
+ λ
2
·G
2
+ ... + λ
k
·G
k
(52)
where the G
j
’s are the, so called, spectral projectors,
for which the following properties hold:
⊲ G
1
+ G
2
+ ... + G
k
= I
⊲ G
i
·G
j
= 0, i 6= j
⊲ G
m
i
= G
i
There are various ways to calculate the spectral pro-
jectors. Among them, the one that is presently utilized
uses only the matrix A and its eigenvalues λ
j
to com-
pute G
j
:
G
j
=
k
∏
i=1
i6= j
A−λ
i
·I
k
∏
i=1
i6= j
λ
j
−λ
i
(53)
ON THE STATE-SPACE REALIZATION OF VECTOR AUTOREGRESSIVE STRUCTURES: AN ASSESSMENT
27
