
GENERATING HIGH-SPEED THREE-DIMENSIONAL DYNAMIC
QUADRUPED WALKING USING AN EVOLUTIONARY SEARCH
Di He, Qining Wang, Chunxia Rong and Guangming Xie
Intelligent Control Laboratory, College of Engineering, Peking University, Beijing 100871, China
Keywords:
Quadruped walking, Three-dimensional gaits, Evolutionary search, Legged robots, Locomotion.
Abstract:
This paper presents an evolutionary computation approach to generate three-dimensional fast forward gaits
for quadruped robots with three motor-driven joints on each limb. We use linear constraints to reduce the
high-dimensional space of parameters in order to generate the speed effectively. Real robot experiments show
that the evolutionary approach is effective in developing quadruped gaits. Satisfactory results are obtained in
about an hour by the autonomous learning process, which starts with a set of hand-tuned parameters.
1 INTRODUCTION
Over the past years, plenty of publications have been
presented in the biomechanics literature which ex-
plained and compared the dynamics of different high-
speed gaits including gallop, canter, bound, and fast
trot (e.g. (Alexander and Jayes, 1983), (Alexander
et al., 1980)). To study and implement legged lo-
comotion, various robot systems that achieve high-
speed and efficient walking gaits have been created
(e.g. (Holmes et al., 2006), (Raibert, 1986), (Collins
et al., 2005)). Since the walking speed of the robots is
one of the most important factors in determining the
success of a team in the RoboCup Four-Legged com-
petitions with the standard platform using Sony AIBO
ERS-7 robots, there has been significant incentive in
the RoboCup community to develop gaits with better
performance on the speed (e.g. (Hornby et al., 1999),
(R
¨
ofer et al., 2004), (Quinlan et al., 2003)).
Theoretically, high-speed gait design can be
achieved by dynamics analysis, if it can be simplified
into dynamics models. However, quadruped robots’
dynamics state are complex with the ground con-
straints. Especially when dealing with the whole
robot, the problem becomes nonlinear and high-
dimensional. Therefore, current methods that dealt
with gait optimization often resort to Inverse Kine-
matics Model, which convert the optimizing prob-
lem into a gait locus design (e.g. (Quinlan et al.,
2003), (R
¨
ofer et al., 2004), (R
¨
ofer et al., 2005), (Rong
et al., 2009)). In previous work, researchers have
designed several locus shapes, e.g. rectangular, el-
liptical, trapezoidal and three-dimensional polygon
to describe the walking patterns for AIBO robots.
With different machine learning algorithms, the gait
locus can be improved. For example, the sharP-
KUngfu Team proposed an Adaptive Particle Swarm
Optimization (APSO) based approach to generate
fast two-dimensional gaits and reaches a speed of
425mm/s (Rong et al., 2009). The team from the
University Newcastle generated fast gaits which is
420mm/s using Genetic Algorithm (GA) and plane
loci of arbitrary shape (Quinlan et al., 2003). How-
ever, these methods only deal with the generation
of two-dimensional quadruped walking. The three-
dimensional walking gaits are more close to real
walking patterns of the quadruped animals. Only
a few studies have been made in the generation of
three-dimensional walking gaits. For example, the
German Team created a flexible gait implementation
that controls the feet on a path described by a three-
dimensional polygon and get a speed of 451mm/s fi-
nally (R
¨
ofer et al., 2005). The results indicated that
gait optimization with a three-dimensional polygon
can obtain stable gaits with higher walking speed.
However, as the complexity of the polygon increases,
the learning procedure is time consuming and may
damage the motor-driven joints of the robots during
the optimization process of the high dimensional pa-
rameters.
As a matter of fact, the performance of optimiza-
tion is not the same by using different gait locus
shapes or machine learning algorithms. Generally,
optimizing with a model of more degrees of freedom
167
He D., Wang Q., Rong C. and Xie G. (2009).
GENERATING HIGH-SPEED THREE-DIMENSIONAL DYNAMIC QUADRUPED WALKING USING AN EVOLUTIONARY SEARCH.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 167-172
DOI: 10.5220/0002184301670172
Copyright
c
SciTePress

is likely to generate a better gait, but it takes more
time. And an algorithm which has a better global
search capability always converges slowly. In this
paper, we use three-dimensional polygon as the gait
model for the locus shape. To solve the problem
of slow convergence of the optimization using three-
dimensional polygon, we propose a method based on
linear constraints to reduce the degrees of freedom of
the model. The whole learning process is running au-
tomatically by the robot with onboard processor. In
real robot experiments, we achieved an effective gait
which speed is higher than the previous known gaits,
using AIBO as the test platform.
The remainder of this paper is organized as fol-
lows. Section II introduces the parameterization and
kinematics for the Sony AIBO ERS-7 robot platform,
and the general methods for quadruped gait planning.
Section III presents our evolutionary search based on
linear constraints. Section IV specifies the evaluation
of gait optimization based on the proposed evolution
and others. Section V presents the conclusion and dis-
cussion.
2 DYNAMIC MODEL FOR AIBO
ROBOT
2.1 Inverse Kinematics Model
The high-level parameters that we adopt to represent
the gait need to be transferred to joint angles of legs
before they can be implemented by the robot. An
inverse kinematics model can be used to solve this
problem. For a linked structure with several straight
parts connecting with each other, the position of the
end of this structure relative to the starting point can
be decided by all angles of linked parts and only one
position results from the same angle values. The def-
inition of the kinematics model is the process of cal-
culating the position of the end of a linked structure
when given the angles and length of all linked parts.
For the AIBO robots, Given the position of the
end of the structure, inverse kinematics calculates out
what angles the joints need to be in to reach that end
point. In this study, the inverse kinematics is used
to calculate necessary joint angles to reach the paw
position determined by gait parameters. Fig. 1 shows
the inverse kinematics model and the coordinates for
AIBO.
The shoulder or hip joint is the origin of the co-
ordinate system. l
1
is the length of the upper limb,
while l
2
is the length of the lower limb. Paw position
is represented by point (x, y, z). The figures and equa-
(a) (b)
Figure 1: The inverse kinematics model and coordinates for
Aibo. (a) is the front view of left fore leg. (b) is the side
view of left fore leg.
tions here only give the view and algorithm to get the
solution for left fore leg of robot. According to the
symmetrical characteristic of legs, all other legs can
use the same equations with some signs changing.
The following equations shows the inverse kine-
matics model:
x = l
2
cosθ
1
sinθ
3
+ l
2
sinθ
1
cosθ
2
cosθ
3
+ l
1
sinθ
1
cosθ
2
y = l
1
sinθ
2
+ l
2
sinθ
2
cosθ
3
(1)
z = l
2
sinθ
1
sinθ
3
− l
2
cosθ
1
cosθ
2
cosθ
3
− l
1
cosθ
1
cosθ
2
The inverse kinematics equation to get θ
1
, θ
2
, θ
3
by
the already known paw position (x, y, z) is as follows:
θ
3
= cos
−1
x
2
+ y
2
+ z
2
− l
2
1
− l
2
2
2l
1
l
2
θ
2
= sin
−1
y
l
2
cosθ
3
+ l
1
θ
1
= − tan
−1
a
b
± cos −1
x
a
2
+ b
2
(2)
where a = l
2
sinθ
3
, b = −l
2
cosθ
2
cosθ
3
− l
1
cosθ
2
.
One problem of the inverse kinematics is that it
always has more than one solution for the same end
point position. However, as to AIBO, only one so-
lution is feasible due to the restriction on the joint
structure. As a result, when using inverse kinematics
to calculate joint angles, it is necessary to take joint
structure limitation into consideration to get the right
solution. Otherwise, it will possibly cause some phys-
ical damage to the robot platform.
2.2 Control Parameters
Before we run the learning gait procedure, the control
parameters representing a gait need to be decided. For
the stance parameters, as shown in Section 2.1, point
(x, y, z) can be translated into (θ
1
, θ
2
, θ
3
). Therefore,
we use coordinates of the paw positions relative to
the shoulders to describe the posture, which is called
FootZeroPosition. As to locus, we choose an arbi-
trary three-dimensional polygon with n vertices (P
1
,
P
2
, .. ., P
n
) as the shape. Additionally, n timing pa-
rameters which we call p length, are needed to spec-
ify the amount of time needed for the foot to travel
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
168

Figure 2: The end of a foot travels as a 3-dimensional poly-
gon.
from vertex P
i
to P
i+1
, where 1 < i < n, and from P
n
to P
1
, the total time needs for one cycle is the step
length, which we assume here is an integral number,
in 0.008 second units. In this way, a total number of
parameters for a single leg of 4n +4. And we suppose
the two diagonally feet are traveling at the same time
while the other two delay for half a period. Thus, the
total number of parameters for the AIBO robot during
the proposed gait optimization process is 8n + 8.
2.3 Evolution of the Parameters
We can calculate the walking posture from point to
point and moment to moment by the model above.
However, because of the constraint of the ground, the
end of the foot in fact will not travel exactly as the
polygons we design, the relation between gait param-
eters and speed is impossible to acquire, and there is
no sufficiently accurate simulator for AIBO due to the
dynamics complexity. As a result, we have to perform
the learning procedure on real robots.
In order to automatically acquiring speed for each
parameter set, the robot has to be able to localize it-
self. Since the low resolution of AIBO’s camera and
limited processing ability, it is faster and more ac-
curate to detect black-white edge than other things.
Thus we use a white board with parallel black bars on
the field for AIBO to localize (see Fig. 3).
During evaluation procedure, the robot walks to a
Figure 3: The white board with parallel black bars for body
adjusting of the AIBO robots.
fixed initial position relative to the board, then loads
the parameter set needed to be evaluated, walks for a
fixed time, e.g. 6s, stops and calculates the forward
speed. After that, the robot walked back and started
another trial. The total time for testing one set of pa-
rameter is usually less than 15s.
3 GAIT OPTIMIZATION WITH
LINEAR CONSTRAINTS
Since the paw of one foot travels a smooth curve in
space, the more complex the polygon that we use to
describe the locus shape, the more close the walking
gait to that of the real robot. However, in practice, the
optimization with a higher dimensional model is more
easily to damage the robot in the gait evolution and
is time-consuming. Here, we propose a new strategy
which reduces the degree of freedom of the model by
linear constraints.
Assume that the paw of one foot travels as a
three-dimensional polygon with 2n-vertices Q
1
, Q
2
,
... Q
2n
. The paw travels from Q
i
to Q
i+1
while
i = 1, 2,.. .,2n − 1 and Q
2n
to Q
1
. Let t
1
, t
2
, ..., t
2n
be
the run-through-time for the edges relative to the time
for the whole polygon, which is under the constraint:
2n
∑
i=1
t
i
= 1 (3)
Given the polygons for the front and rear legs respec-
tively, it produces a 16n dimensional space of the lo-
cus for the whole robot. Then the linear constraint is
as follows:
Q
2k+1
= (Q
2k
+ Q
2k+2
)/2, k = 1, 2,... ,n − 1
Q
1
= (Q
2
+ Q
2n
)/2,
t
2k−1
= t
2k
, k = 1, 2,... ,n.
(4)
Under the linear constraint, the dimension of locus re-
duces by half. Furthermore, since the vertex Q
2k+1
is
the midpoint of Q
2k
and Q
2k+2
, a 2n vertex polygon
changes into an n vertex polygon in fact. It means
the gait optimization can begin with a simple locus
shape first, such as a three-dimensional polygon with
4-vertices. When the speed approaches to a certain
level, change the locus shape into a polygon with 8-
vertices by linear interpolation and continue the pro-
cedure.
The optimization process can be divided into two
parts. In the first part, the optimization process fo-
cuses on global search by using linear constraints.
When approaches the optimal solution, the optimiza-
tion process moves to the second part, where the lin-
ear constraints will be removed and the local search
GENERATING HIGH-SPEED THREE-DIMENSIONAL DYNAMIC QUADRUPED WALKING USING AN
EVOLUTIONARY SEARCH
169
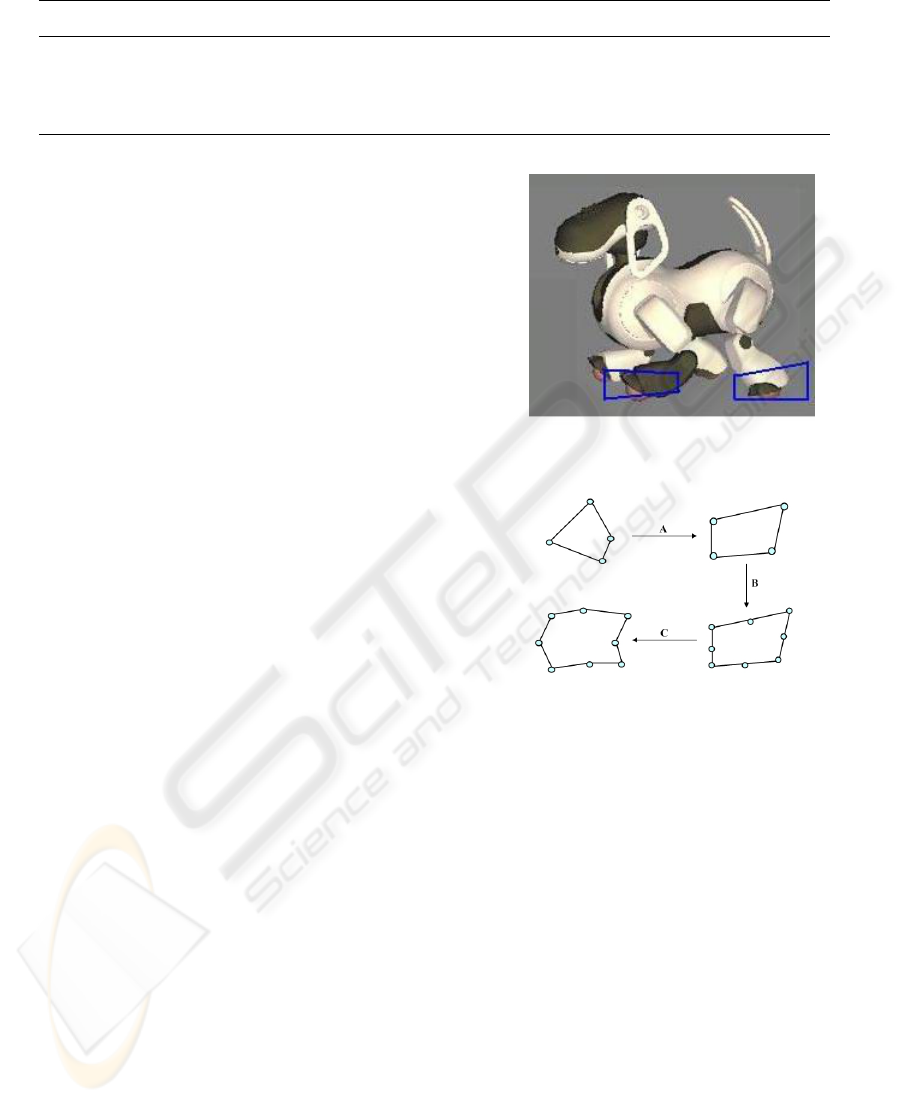
Table 1: Control parameters in gait evolution.
Parameter Description
foot zero position relative position of paws and shoulders
points of the polygon relative position of the locus and Foot Zero Position
p-length run-through-time for the edge relative to the time for the whole polygon
step length time for one complete step in 0.008 second units
will be emphasized. We can apply different optimiza-
tion approaches, e.g. APSO, GA, to different parts of
the optimization process.
4 EXPERIMENTAL RESULTS
Using the method described above, we carried out
two separate experiments and evaluate the walking re-
sults. In the first experiment, since different machine
learning algorithms perform differently during opti-
mizations, we evaluate the performance of using GA
or APSO. Similar to (Rong et al., 2009), the inertial
weight of APSO is determined by the equation:
w = 1.2 − 0.02 × k, (k ≤ 10)
w = 1 − 0.085 × (k − 10), (10 < k ≤ 20)
w = 0.15 − 0.03 × (k − 20), (20 < k ≤ 25)
w = 0, (k > 25) (5)
where k is the iteration. Three-dimensional poly-
gon with 4-vertices (40-dimensional search space)
is chose as the locus shape for the low-dimensional
search section. We begin the optimization with a
hand-tuned gait which is 250mm/s as initial state. Af-
ter the speed rising to about 400mm/s, we change the
optimized locus into an 8-vertices polygon by linear
interpolation and continue the evolution. The process
is shown in Fig. 4.
For both of the optimization algorithms, the num-
ber of individuals for one population is chosen to be
10. And in the genetic algorithm we use five better
individuals to generate the other five by crossover op-
erator and mutation operator.
Fig. 5 shows the best result of each generation in
different strategies. We can see that the strategy of
using APSO first and optimizing with GA after lin-
ear interpolation achieved better result than the other
three. Moreover, We can note that there are both ad-
vantages and disadvantages comparing these experi-
ments with different algorithms. Fig. 5 indicate that
APSO can find the optimal solution area during the
early period of the global search.
The optimized speed of the 15th generation
reaches about 400mm/s. However, the ability of lo-
cal search is weak and the convergence is relatively
(a)
(b)
Figure 4: (a) shows the initial locus for the robot, (b) shows
the optimization process: in procedure A, we optimize the
locus shape of 8-vertices polygon with linear constraint,
which is equal to optimize a gait of 4-vertices polygon. In
procedure B, we change the locus shape by linear interpola-
tion. In procedure C, we optimize with the high dimensional
locus shape of 8-vertices polygon.
slow. Contrarily, GA grows slowly during the early
period of global search, the optimized speed reaches
about 400mm/s until the optimization process runs to
the 25th generation. However, if given a relatively
optimal solution, GA can find the best result within a
short time period. Thus, we select the strategy which
integrates APSO and GA to inherit the advantages of
them.
In the second experiment, we compare our method
with the existing methods (see Fig. 6).
It indicates that during learning, GA performs
slowly with speed result 403mm/s after 30 genera-
tions. APSO grows fast in the first 13 generations,
but grows slow then and reaches a speed of 435mm/s
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
170
0 5 10 15 20 25 30
250
300
350
400
450
500
number of generations (−)
velocity (mm/s)
APSO/GA
APSO/APSO
(a)
0 5 10 15 20 25 30
260
280
300
320
340
360
380
400
420
440
number of generations (−)
velocity (mm/s)
GA/GA
GA/APSO
(b)
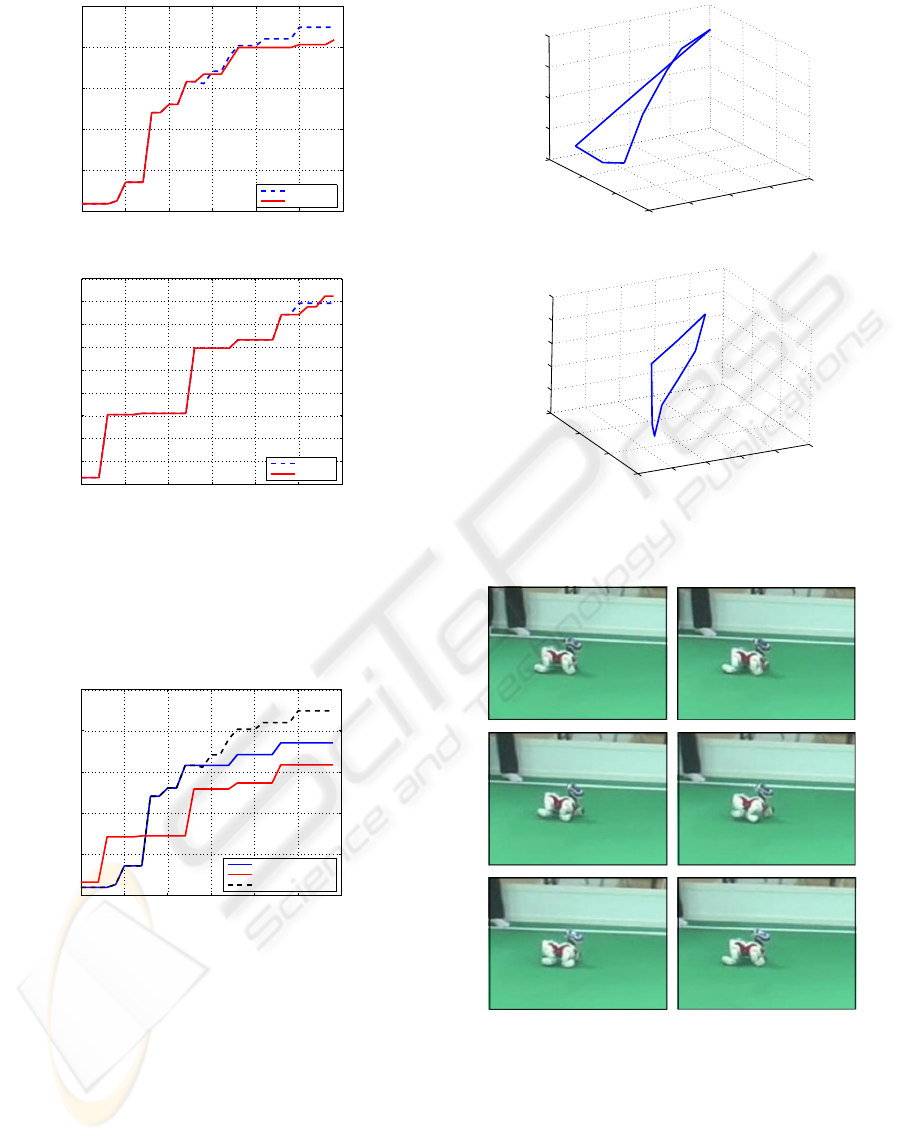
Figure 5: The velocity of the best gait from each generation
by using different strategies. e.g. GA/APSO (the red line in
(b)) means using GA to optimize the 4-vertices polygon and
optimize the 8-vertices polygon with APSO after the linear
interpolation.
0 5 10 15 20 25 30
250
300
350
400
450
500
number of generations (−)
velocity (mm/s)
APSO with 4 vertices
GA with 4 vertices
with new strategy
Figure 6: The velocity of the best gait from each generation
in real robot experiments.
at last. Our new search strategy achieves better result
than the other two, and the speed reaches to 478mm/s.
It suggests that more dimensions of the search space
can get a better gait than the less one. And our strat-
egy avoids the slow learning process. Fig. 7 and Fig.
8 show the locus of the paws and the walking perfor-
mance of the real robot respectively.
The final speed of the optimized quadruped gait is
faster the the existing results using AIBO platform.
−40
−20
0
20
40
−40
−20
0
20
−40
−20
0
20
40
x
y
z
(a)
−60
−40
−20
0
20
40
−20
−10
0
10
−10
0
10
20
30
40
x
y
z
(b)
Figure 7: locus.
Figure 8: A sequence of photos captured during au-
tonomous walking of the AIBO robot on carpet.
5 CONCLUSIONS
In this paper, we have demonstrated a novel evo-
lutionary computation approach to generate three-
dimensional quadruped fast forward gaits using the
AIBO robot platform. Our method was easily coded
GENERATING HIGH-SPEED THREE-DIMENSIONAL DYNAMIC QUADRUPED WALKING USING AN
EVOLUTIONARY SEARCH
171

and computationally inexpensive. Moreover, by lin-
ear constraints, the evolution converged extremely
fast and the training time was largely reduced. It
is an essential advantage for physical robot learning,
minimizing possible damage to the robot. It reduced
the human work as well as generating evolutional re-
sults varied a lot in different experiences. Through
experiments which took about 60 minutes each, we
achieved several high performance sets of gait param-
eters which differ a lot from each other. The proposed
method generated a speed of 478mm/s which is faster
than the previous known gaits.
One of the useful aspects of the proposed method
is that the high-dimensional parameter set is opti-
mized in an effective way. In order to reduce the
dimension, we approach a linear constraint for the
parameters. Under this constraint, the locus can be
optimized fast. Another contribution of our method
is the combination of the two algorithms, GA and
APSO. The result shows that the strategy has better
global searching capability and local searching capa-
bility than using each algorithm only.
In the future, we will compare different high-
performance gait parameters and analyze the dynam-
ics model of the robot to obtain further understand-
ing of the relation between parameter and its perfor-
mance. In this study, we find that the gait actually
executed by the robot differs significantly from the
one that we design. There are several possible rea-
sons. The most important one is the interaction with
environment prevents the implement of some strokes
of robot legs. Although with learning approach, fac-
tors that cause the difference between actual gait and
planned gait do not have to be taken into considera-
tion. However, we assume that if the planned gait and
actual gait can conform to each other, AIBO will walk
more stable with high speed. In order to solve the
problem, the analysis of dynamics between the robot
and the environment is necessary. In the gait learn-
ing procedure of current study, we only evolve fast
forward gait and choose forward speed as the fitness.
Later on, we will try to learn effective gaits in other
directions, for example, gaits for walking backward,
sideward and turning. We also consider exploring op-
timal omni-directional gaits. With gaits working well
at all directions, robots will be able to perform more
flexibly and reliably.
ACKNOWLEDGEMENTS
The authors gratefully acknowledge the con-
tribution of the team members of the sharP-
KUngfu Robot Team. Part of the source code
and videos can be found on the web page
http://www.mech.pku.edu.cn/robot/fourleg/
REFERENCES
R. M. Alexander, A. S. Jayes, A dynamic similarity hypoth-
esis for the gaits of quadrupedal mammals, J. Zoology,
vol. 201, pp. 135-152, 1983.
R. M. Alexander, A. S. Jayes, R. F. Ker, Estimates of energy
cost for quadrupedal running gaits, J. Zoology, vol.
190, pp. 155-192, 1980.
S. Collins, A. Ruina, R. Tedrake, M. Wisse, Efficient
bipedal robots based on passive dynamic walkers, Sci-
ence, vol. 307, 2005, pp. 1082-1085.
P. Holmes, R. J. Full, D. Koditschek, J. Guckenheimer, The
dynamics of legged locomotion: Models, analyses,
and challenges, SIAM Review, vol. 48, no. 2, 2006,
pp. 207-304.
G. S. Hornby, M. Fujita, S. Takamura, T. Yamamoto, O.
Hanagata, Autonomous evolution of gaits with the
Sony quadruped robot, Proceedings of the Genetic
and Evolutionary Computation Conference, vol. 2,
1999, pp. 1297-1304.
M. J. Quinlan, S. K. Chalup, R. H. Middleton. Techniques
for improving vision and locomotion on the Sony
AIBO robot. Proceedings of the 2003 Australasian
Conference on Robotics and Automation, 2003.
M. J. Quinlan, Nubots team robocup 2005. Technical report,
2005.
M. H. Raibert, Legged robots that balance, MIT Press,
Cambridge, 1986.
C. Reynolds, Flocks, herds, and schools: A distributed be-
havioral model, Comp. Graph., vol. 21, no. 4, pp. 25-
34, 1987.
C. Rong, Q. Wang, Y. Huang, G. Xie, L. Wang, ”Au-
tonomous evolution of high speed quadruped gaits us-
ing particle swarm optimization”, Lecture Notes in Ar-
tificial Intelligence, 5399, Springer-Verlag Berlin Hei-
delberg, 2009.
T. R
¨
ofer, H. D. Burkhard, U. D
¨
uffert, J. Hoffmann, D.
G
¨
ohring, M. J
¨
ungel, M. L
¨
otzsch, O. v. Stryk, R.
Brunn, M. Kallnik, M. Kunz, S. Petters, M. Risler, M.
Stelzer, I. Dahm, M. Wachter, K. Engel, A.Osterhues,
C. Schumann, J. Ziegler, GermanTeam RoboCup
2004. Technical report, 2004.
T. R
¨
ofer, H. D. Burkhard, U. D
¨
uffert, J. Hoffmann, D.
G
¨
ohring, M. J
¨
ungel, M. L
¨
otzsch, O. v. Stryk, R.
Brunn, M. Kallnik, M. Kunz, S. Petters, M. Risler,
M. Stelzer, I. Dahm, M. Wachter, K. Engel, A.
Osterhues, C. Schumann, J. Ziegler, GermanTeam
RoboCup 2005. Technical report, 2005.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
172
