
A LOGIC PROGRAMMING FRAMEWORK FOR LEARNING BY
IMITATION
Grazia Bombini, Nicola Di Mauro, Teresa M.A. Basile, Stefano Ferilli and Floriana Esposito
Dipartimento di Informatica, Universit
`
a degli Studi di Bari, via Orabana 4, Bari, Italy
Keywords:
Learning by imitation, Agents.
Abstract:
Humans use imitation as a mechanism for acquiring knowledge, i.e. they use instructions and/or demonstra-
tions provided by other humans. In this paper we propose a logic programming framework for learning from
imitation in order to make an agent able to learn from relational demonstrations. In particular, demonstra-
tions are received in incremental way and used as training examples while the agent interacts in a stochastic
environment. This logical framework allows to represent domain specific knowledge as well as to compactly
and declaratively represent complex relational processes. The framework has been implemented and validated
with experiments in simulated agent domains.
1 INTRODUCTION
Learning from demonstration or learning by imita-
tion represents a key research topic in robotics (Bil-
lard and Siegwart, 2004; Schaal, 1999; Schaal et al.,
2003), being a promising approach, based on human-
robot interaction, towards effective robot program-
ming. Indeed, the need of robots that can learn in a
human environment motivates recent research to in-
vestigate forms of social learning, such as imitation-
based learning (Schaal, 1999) and learning by demon-
stration (Nicolescu and Mataric, 2003), inspired by
the way people learn. By means of this approach, a
robot should learn to imitate a teacher by observing
demonstrations. Recent research in other fields con-
siders imitative learning as an essential part of human
development (Meltzoff, 2007). Humans and animals
use imitation as a mechanism for acquiring knowl-
edge. This method of learning has been shown (Cher-
nova and Veloso, 2007) to reduce learning time com-
pared to classical exploration-based methods such as
reinforcement learning (Smart and Kaelbling, 2002).
Learning from demonstration is an approach that
enables robots (an unskilled agent or the observer)
to learn tasks by simply observing performances of
a skilled agent (the teacher) (Atkeson and Schaal,
1997; Smart and Kaelbling, 2002). The robot gath-
ers information about the task in the form of percep-
tual inputs and action outputs and estimates the latent
control policy of the demonstrator. The estimated pol-
icy can then be used to drive the robots’s autonomous
behavior.
This paper aims at providing a framework that al-
lows an agent to learn and revise in an incremental
way a high level representation of a task by imitating
a skilled agent.
Learning from demonstration is strongly related
to supervised learning, in which the goal is to learn
a policy given a fixed set of labeled data (Bentivegna
et al., 2004). In this perspective it is possible to col-
lect the interaction performed by teaching in the real
world and to use it as examples for the learning phase.
Such examples represent the best action to be taken in
that context. Additionally, data are gathered incre-
mentally, thus minimizing the number of labeled data
required to learn the given policy.
In this paper we present an incremental policy
learning approach based on a relational language used
to describe both the demonstration examples and the
learnt policy. The agent actively interacts with the
human by deciding the next action to execute and re-
questing demonstration from the expert based on the
currently learned policy.
2 LOGICAL BACKGROUND
We used Datalog (Ullman, 1988) as a representation
language for the domain and induced knowledge, that
here is briefly reviewed. For a more comprehen-
sive introduction to Logic Programming and Induc-
tive Logic Programming (ILP) we refer the reader
218
Bombini G., Di Mauro N., M. A. Basile T., Ferilli S. and Esposito F. (2009).
A LOGIC PROGRAMMING FRAMEWORK FOR LEARNING BY IMITATION.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
218-223
DOI: 10.5220/0002007502180223
Copyright
c
SciTePress

to (Bratko, 2001; Muggleton and De Raedt, 1994;
Lavrac and Dzeroski, 1994).
A first-order alphabet consists of a set of con-
stants, a set of variables, a set of function symbols,
and a non-empty set of predicate symbols. Each func-
tion symbol and each predicate symbol is associated
to a natural number (its arity). The arity represents
the number of arguments the function has. A term is a
constant symbol, a variable symbol, or an n-ary func-
tion symbol f applied to n terms t
1
, t
2
, . . . , t
n
. An atom
(or atomic formula) p(t
1
, . . . , t
n
) is a predicate symbol
p of arity n applied to n terms t
i
. An atomic formula l,
or its negation l, is said to be a (respectively, positive
or negative) literal.
A clause is a formula of the form
∀X
1
∀X
2
. . . ∀X
n
(L
1
∨ L
2
∨ . . . ∨ L
i
∨ L
i+1
∨ . . . ∨ L
m
)
where each L
i
is an atom and X
1
, X
2
, . . . X
n
are all
the variables occurring in L
1
∨ L
2
∨ . . . L
i
∨ . . . L
m
.
Most commonly the same clause is written as
an implication L
1
, L
2
, . . . L
i−1
← L
i
, L
i+1
, . . . L
m
,
where L
1
, L
2
, . . . L
i−1
is the head of the clause and
L
i
, L
i+1
, . . . L
m
is the body of the clause.
Clauses, literals and terms are said to be ground
whenever they do not contain variables. A Datalog
clause is a clause with no function symbols of non-
zero arity; only variables and constants can be used
as predicate arguments.
A substitution θ is defined as a set of bindings
{X
1
← a
1
, . . . , X
n
← a
n
} where X
i
, 1 ≤ i ≤ n are vari-
ables and a
i
, 1 ≤ i ≤ n are terms. A substitution θ is
applicable to an expression e, obtaining the expres-
sion eθ, by replacing all variables X
i
with their corre-
sponding terms a
i
.
3 LEARNING FROM
DEMONSTRATION
Here, we assume that the environment is defined by a
finite set of states S. For each state s ∈ S, the agent has
available a finite set of actions A(s) ⊆ A which cause
stochastic state transition, where A is the set of all
the primitive actions. In particular, an action a ∈ A(s)
causes a transition to state s
0
a
when executed in state
s.
The agent is assumed to observe a demonstrator
that performs the correct sequence of actions useful
to reach a given goal by starting from an initial state
of the environment. During each training sequence,
the agent records the observation about the environ-
ment and the corresponding action performed by the
demonstrator. An observation o ∈ S is represented by
a set of ground Datalog literals.
Example 1. The following set of literals repre-
sents an observation in a blocks world consisting of
4 blocks (a, b, c and d), where blocks can be on the
floor or can be stacked on each other. Literal on(X, Y )
denotes that block X is on block Y , and that X and
Y belong to the same stack. { clear(a), on(a, c),
on(c, d), on(d, f), clear(b), on(b, f), block(a), block(b),
block(c), block(d), floor(f) }.
In this domain, the available actions that can
be performed by the demonstrator are of the
kind move(X, Y ), with X ∈ {a, b, c, d} and Y ∈
{a, b, c, d, f }, X 6= Y .
Each training example, e = {a, o}, consists of an
action a ∈ A selected by the demonstrator and an
observation o ∈ S. Obviously, we assume that the
demonstrator uses a good policy π to achieve the goal.
Hence, the aim of the agent is to learn this hidden
policy π : S → A mapping states (observations) to ac-
tions.
Classical supervised learning is based on an in-
ductive learning method able to generalize from pos-
itive and negative examples labeled by the user. In
the case of imitative learning, the action taken by the
teacher agent may be considered as a positive exam-
ple and all other possible actions as negative exam-
ples. In particular, given a state s, if the teacher takes
action a
i
∈ A(s), then the observer can assume that a
i
is a positive example and all other actions a
j
∈ A(s)
1 ≤ j 6= i ≤ |A(s)| are negative ones. A negative ex-
ample a
j
is considered reliable until the demonstrator
performs a
j
in state s. The general process must be
slightly modified in order to retract this kind of ac-
tion.
Furthermore, the process of imitative learning is
naturally modeled by an agent able to modify its the-
ory in an incremental way, where each new incoming
example may give rise to a theory revision process.
We represent the policy as a set of logical clauses
where the head of the clause represent the action
while the body represents the state. In particular, a
clause represents an action that may be performed in
a given state.
Example 2 . In the blocks world domain a learned
rule may be the following: {move(A, B) :- goal on(D,
E), clear(A), on(A, F), on(D, B), block(D), block(E),
block(A), block(F), floor(B), not(on(F,B))}
Moving block A on the floor is a good choice if
block A is on block F, block F is not on the floor, block
D is on the floor, and the goal is to put block D on
block E.
A LOGIC PROGRAMMING FRAMEWORK FOR LEARNING BY IMITATION
219

Algorithm 1. Tuning(E,T,M).
Input: E: example; T : theory; M: historical mem-
ory;
1: Add E to M
2: if E is a positive example not covered from T
then
3: generalize(T , E, M)
4: else
5: if E is a negative example covered by T then
6: specialize(T , E, M)
4 RELATIONAL INCREMENTAL
LEARNING
4.1 INTHELEX
INTHELEX (INcremental THeory Learner from EX-
ample) (Esposito et al., 2004) is the learning system
for the induction of first-order logic theories from
positive and negative examples exploited in this pa-
per. It learns theories in form of sets of Datalog
clauses, interpreted according the Object Identity (OI
for short) (Semeraro et al., 1996) assumption, accord-
ing to which, within a clause, terms (even variables)
denoted with different symbols must be distinct. It
can learn simultaneously several concepts, possibly
related to each other. It uses a full memory storage
strategy, and therefore retains all the available exam-
ples in a historical memory. A set of examples of the
concepts to be learned is incrementally provided by
an expert. Whenever a new example is taken into ac-
count, it is also stored in the historical memory.
INTHELEX is fully and inherently incremental.
The learning phase can start by taking in input a previ-
ously generated version of the theory or from the first
available example and an empty theory. The train-
ing examples are exploited by the system to modify
incorrect hypotheses according to a data-driven strat-
egy. When the theory is not correct with respect to an
example, it is rejected and a process of theory revi-
sion starts. Such a process is based on two inductive
refinement operator, one for generalising definitions
that reject positive examples (completeness), and the
other for specialising definitions that explain negative
examples (consistency).
Algorithm 1 reports the procedure used in
INTHELEX for refining a theory. M represents the
set of all positive and negative examples already pro-
cessed, E is the current example to be examined, and
T is the theory learned from the examples in M.
4.2 INTHELEX
I
As already pointed out, INTHELEX works by tak-
ing into account the examples provided in incremental
way by the expert. In the scenario of an agent acting
in a stochastic world, the correct actions of the agent
may be considered as positive examples in a super-
vised learning task.
In our framework we assume that an agent A aims
at learning to act in a world by imitating an expert
agent E. Hence, each action taken from E in a given
state may be considered as a positive example for A.
All other possible actions in the same state should be
considered as negative examples. In this way A as-
sumes that E acts in a correct way. Given an action-
state pair (a, s) and a set A(s) of possible actions that
can be taken in state s, all other actions in A(s) \ a
is assumed to be negative examples while the expert
agent does not take any of them in the same state s.
When it happens, it is necessary to retract the previ-
ous hypothesized negative example.
Given a goal, each training example e = {a, o} be-
longs to a specific learning class based on action a.
For each class a theory must be learned in order to be
able to predict the corresponding action to be taken
on unseen observations.
The algorithm starts with an empty theory and an
empty historical memory. The agent observes the se-
quences of actions performed by the demonstrator.
For each timestep the agent tries to classify the ob-
servation (i.e., to predict the corresponding action) by
using its learned model. The set N of all actions that
are allowed in the domain and that the agent can per-
form in a state s, but are not performed by the demon-
strator, are supposed to be negative examples for the
class a (the correct action) in the state s.
The classification task returns an action c that is
compared to the correct action a the demonstrator per-
forms. When c does not correspond to the action a a
theory revision is needed. All negative examples for
class a with the same body as o are expunged from
the historical memory. A generalization process of the
current theory against example e, according to filtered
historical memory, starts. At the end of the learning
process, the learned theory T represents the optimal
policy.
5 EXPERIMENTAL RESULTS
The proposed learning framework has been applied
to two domains generally used in the field of agent
learning.
ICEIS 2009 - International Conference on Enterprise Information Systems
220

Algorithm 2. IIL.
1: errors ← 0
2: T ←
/
0
3: M ←
/
0
4: loop
5: (o, a) ← get an observation-action pair
6: N ← {(o, ¬a
i
)|a
i
∈ A(o) \ {a}}
7: c ← classify(o,T)
8: if c 6= a then
9: errors++
10: for all e ∈ M do
11: if e is negative for the class a with the
same body as o then
12: M ← M \ {e}
13: generalize( T , a ← o, M)
14: M ← M ∪ {a ← o}
15: for all a
i
∈ N do
16: if M does not contain the positive example
a
i
← o then
17: if c = a
i
then
18: errors++
19: specialize( T , ¬a
i
← o, M)
20: M ← M ∪ {a ← o}
5.1 The Predator Prey Environment
The first experiment regards the problem of learning
a policy in a domain where a predator should cap-
ture a prey. This stochastic environment consists of a
4x4 grid surrounded by a wall, with a predator and a
prey inside. The predator catches the prey if the prey
comes on the same square as the predator at the end of
its move. The prey moves with random actions, while
the predator follows a good user-defined strategy in
order to capture the prey. Both the predator and the
prey can move in four directions: north, east, south
and west. The action of an agent consists in moving
to the cell immediately adjacent in the selected direc-
tion. In case the target cell is a wall, the agent remains
in the same cell. The two agents move in alternate
turns.
An observation is made up of the agent’s percep-
tion about the cells surrounding it in the four direc-
tions and the cell it occupies. The state of each cell
may be empty, wall or agent. Starting from an initial
state, once captured the prey the sequence of obser-
vations does not restart by placing agents in random
positions, but it continues from the positions of catch.
For example, Figure 1 reports a predator agent
having a wall to the west and the prey to the east.
This observation is represented by the following set
of literals: {north(a, e), south(a, e), east(a, p), west(a,
w), under(a, e)} where a stays for the predator agent,
p for the prey agent, e for empty, and w for wall.
In this example, the positive action taken from the
agent is move north(a), while not(move east(a)) and
not(move south(a)) and not(move west(a)) are wrong
actions.
Figure 1: A sample predator-prey domain. The black circle
represents the predator and the gray circle represents the
prey. The figure on the right represents the predator agent
percept.
Once fixed the strategy to capture the prey, we
simulated a scenario in which a predator instructs an-
other agent to capture the prey in a minimum number
of a steps. Hence, given an observation, the action
taken from the predator represents a positive training
example, while all other possible actions are supposed
to be negative examples.
We generated 10 sequences of observations. Each
sequence, containing the traces of prey’s captures,
is made up of 322.5 positive and 967.5 negative
observation-action pairs on average. Starting from a
positive instance each alternative action has been hy-
pothesised to be a negative instance.
On all of the 10 sequences the system learned a
theory made up of 9.4 clauses, obtained by 14.8 gen-
eralizations and 2.2 specializations (17 errors) on av-
erage. It is worth noting that, in this domain, 1303
examples are sufficient on average for the system to
learn a good policy. All further examples do not af-
fect the learned policy.
In order to evaluate the behavior of the learning
process, we generated a sequence made up of 1568
observation-action pairs. Figure 2 reports the number
of errors (i.e., a generalization or a specialization re-
quest) the agent made during the learning phase. It
can be noticed that the number of error grows until
the system learns the correct policy (i.e., the learned
classification theory). Figure 3 reports the predic-
tive accuracy of the policy learnt by the agent dur-
ing the imitation process on the complete historical
memory made up of the complete set of 1568 positive
observation-action pairs.
5.2 The Blocks World Environment
This domain consists of a surface (floor) on which
there are four blocks. Blocks may be on the floor or
one on top of another in a stack. To describe the world
we use relations such as on(a, b), i.e. block a is on
A LOGIC PROGRAMMING FRAMEWORK FOR LEARNING BY IMITATION
221
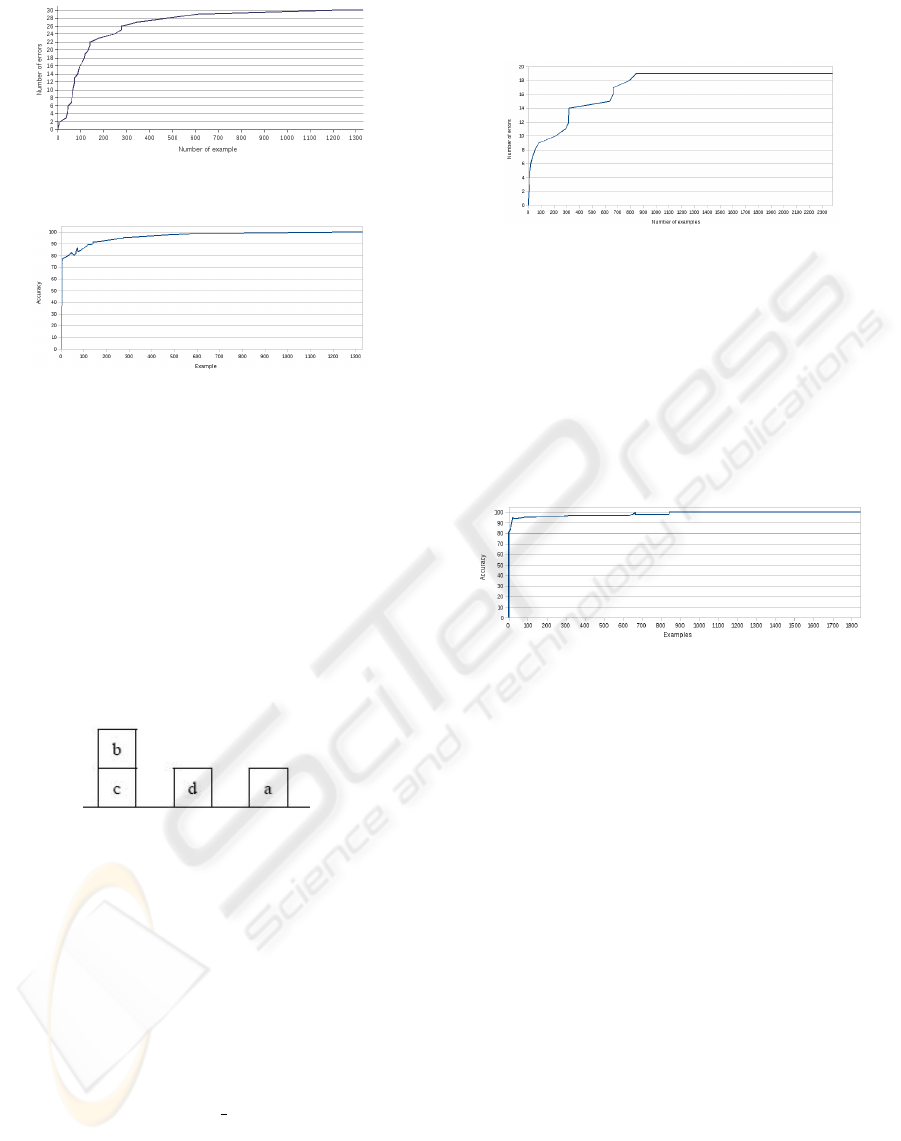
Figure 2: Errors during the learning phase.
Figure 3: Prediction accuracy (%) over the entire historical
memory at each revision theory.
block b, and clear(a), i.e. block a is clear. Only clear
blocks can be moved. An agent can move a block at a
time, on another block or on the floor. We used the lit-
eral move(a, b) to describe the action of moving block
a on block b.
For example, the configuration reported in Fig-
ure 4 is represented by the following set of literals
{on(c, f), clear(d), on(d, f), clear(a), on(a, f), clear(b),
on(b, c)} where f stas for floor and a, b, c, d are
blocks.
Figure 4: A blocks world example.
The tasks taken into account are: stack, achieved
when all blocks are on one stack; unstack, achieved
when all blocks are on the floor; and on(a,b), reached
when block a is on block b. We simulated the be-
havior of an agent able to select effective actions to
achieve a goal (stack, unstack and on(a,b)). Each
observation along with the corresponding action rep-
resents a positive example; all the other actions of
moving other blocks are considered as negative exam-
ples. For instance, considering the scenario reported
in Figure 4, if the goal is goal on(a, b), the correct ac-
tion is move(a, b) and the wrong actions are move(a,
d), move(b, f), move(b, d), move(b, a), move(d, a),
move(d, b).
We have generated 10 sequences of observations.
Each sequence is made up on average of 382.1 pos-
itive observation-action pairs, and 2055.2 negative
observation-action pairs generated starting from the
positive action.
Figure 5: Errors during the learning phase.
Figure 5 reports the number of errors the agent
made during the learning phase on a sequence of 2379
observation-action pairs.
On all of the 10 sequences the system learned a
theory made up of 5.2 clauses, obtained by 5.8 gen-
eralization and 3.1 specialization (8.2 errors) on aver-
age. It is worth noting that, in this domain, 821 exam-
ples on average are sufficient for the system to learn a
good policy.
Figure 6: Prediction accuracy (%) over the entire historical
memory at each revision theory.
Figure 6 reports the predictive accuracy of the
agent on the historical memory at the and of the learn-
ing process.
6 CONCLUSIONS AND RELATED
WORKS
An agent can learn using real examples of agent in-
teraction with the world. In (Jebara and Pentland,
2002) the distribution of the environment is used to
predict an agent’s behavior. (Verma and Rao, 2007)
proposes a framework for imitative learning that uses
a probabilistic Graphical Model to describe an imita-
tion process. A Graphical model is used to model the
behavior of both the agent and the observed teacher.
In (Jansen and Belpaeme, 2006) the authors
present a model for finding the intended goal of a
demonstration using iterative interactions. They in-
fer the goal of a demonstration without imitating the
steps on how to reach the goal, but based on some
psychological observations reported in (Wohlschlager
et al., 2003). The same psychological observations
ICEIS 2009 - International Conference on Enterprise Information Systems
222

are taken into account in (Billard et al., 2004), in
which agents learn new goals and how to achieve
them.
In (Chernova and Veloso, 2007) a demonstration-
based learning algorithm (confident execution frame-
work) is used to train an agent. Such a framework al-
lows an agent to learn a policy from demonstration. In
the learning process, the agent observes the execution
of an action. An agent is provided with a decision-
making mechanism that allows it to actively choose
whether observing or acting, with a gradually increas-
ing autonomy. To learn a policy a supervised learning
approach is used and the training data are acquired
from the demonstration. All these approaches still do
not use a relational representation formalism able to
generalize the learned policies.
In this paper we have presented a logic framework
that allows quickly, incrementally and accurately to
train an agent to imitate a demonstrator of the task.
REFERENCES
Atkeson, C. and Schaal, S. (1997). Robot learning from
demonstration. In Fisher, D., editor, Proceedings of
the 14th International Conference on Machine Learn-
ing (ICML), pages 12–20.
Bentivegna, D., Atkeson, C., and Cheng, G. (2004). Learn-
ing from observation and practice using primitives. In
AAAI Fall Symposium Series, ‘Symposium on Real-
life Reinforcement Learning’.
Billard, A., Epars, Y., Calinon, S., Cheng, G., and Schaal,
S. (2004). Discovering Optimal Imitation Strate-
gies. robotics and autonomous systems, Special Issue:
Robot Learning from Demonstration, 47(2-3):69–77.
Billard, A. and Siegwart, R. (2004). Robot learning from
demonstration. Robotics and Autonomous Systems,
47(2-3):65–67.
Bratko, I. (2001). Prolog programming for artificial intelli-
gence, 3rd ed. Addison-Wesley Longman Publishing
Co.
Chernova, S. and Veloso, M. (2007). Confidence-based pol-
icy learning from demonstration using gaussian mix-
ture models. In AAMAS ’07: Proceedings of the 6th
international joint conference on Autonomous agents
and multiagent systems, pages 1–8, New York, NY,
USA. ACM.
Esposito, F., Ferilli, S., Fanizzi, N., Basile, T., and
Di Mauro, N. (2004). Incremental learning and con-
cept drift in inthelex. Intelligent Data Analysis Jour-
nal, Special Issue on Incremental Learning Systems
Capable of Dealing with Concept Drift, 8(3):213–237.
Jansen, B. and Belpaeme, T. (2006). A computational
model of intention reading in imitation. Robotics and
Autonomous Systems, 54(5):394–402.
Jebara, T. and Pentland, A. (2002). Statistical imitative
learning from perceptual data. In Proc. ICDL 02,
pages 191–196.
Lavrac, N. and Dzeroski, S. (1994). Inductive Logic Pro-
gramming: Techniques and Applications. Ellis Hor-
wood, New York.
Meltzoff, A. N. (2007). The ”like me” framework for recog-
nizing and becoming an intentional agent. Acta Psy-
chologica, 124(1):26–43.
Muggleton, S. and De Raedt, L. (1994). Inductive logic
programming: Theory and methods. Journal of Logic
Programming, 19/20:629–679.
Nicolescu, M. N. and Mataric, M. J. (2003). Natural meth-
ods for robot task learning: instructive demonstra-
tions, generalization and practice. In Proceedings
of the second international joint conference on Au-
tonomous agents and multiagent systems (AAMAS03),
pages 241–248. ACM.
Schaal, S. (1999). Is imitation learning the route to
humanoid robots? Trends in cognitive sciences,
3(6):233–242.
Schaal, S., Ijspeert, A., and Billard, A. (2003). Com-
putational approaches to motor learning by imita-
tion. Philosophical Transactions: Biological Sci-
ences, 358(1431):537–547.
Semeraro, G., Esposito, F., and Malerba, D. (1996). Ideal
refinement of datalog programs. In Proietti, M., editor,
Logic Program Synthesis and Transformation, volume
1048 of LNCS, pages 120–136. Springer.
Smart, W. and Kaelbling, L. (2002). Effective rein-
forcement learning for mobile robots. In IEEE In-
ternational Conference on Robotics and Automation
(ICRA), volume 4, pages 3404–3410.
Ullman, J. (1988). Principles of Database and Knowledge-
Base Systems, volume I. Computer Science Press.
Verma, D. and Rao, R. P. N. (2007). Imitation learning us-
ing graphical models. In Kok, J. N., Koronacki, J.,
de M
´
antaras, R. L., Matwin, S., Mladenic, D., and
Skowron, A., editors, 18th European Conference on
Machine Learning, volume 4701 of LNCS, pages 757–
764. Springer.
Wohlschlager, A., Gattis, M., and Bekkering, H. (2003).
Action generation and action perception in imitation:
An instantiation of the ideomotor principle. Philo-
sophical Transaction of the Royal Society of London:
Biological Sciences 358, 1431:501–515.
A LOGIC PROGRAMMING FRAMEWORK FOR LEARNING BY IMITATION
223
