
A MOBILE BROWSER FOR GEO-REFERENCED IMAGES
USING AN ACCELEROMETER-BASED COMPASS
Francesco Massidda, Roberto Manca
Geoweb and Mobile Experience Lab, Sardegna Ricerche, 09010 Pula , CA - Italy
Davide Carboni
CRS4, Parco Scientifico e Tecnologico Sardegna Ricerche, 09010 Pula CA - Italy
Keywords: Mobile Photo Browsing, GPS, Compass, Accelerometers, Geo-Browsing, Maps.
Abstract: In this paper a new mobile browser for geo-referenced pictures is introduced. Based on common embedded
GPS and accelerometer sensors, the implemented mobile browser is able to show tagged photos on the web,
depending on the direction the user is facing to, allowing a positional-dependent touristic, commercial or
cultural preview of our cities. A novel compass-simulator developed using build-in accelerometers data
samples represents.
1 INTRODUCTION
One of the most promising usage of user generated
content and metadata is the geo-referencing of
multimedia objects in e-learning, environmental
protection, tourism, culture and other application
fields. Among the others, pictures perfectly meet the
requirement of digital geo-referenced resources
because photos always refer to well known places
and times in/at which they have been taken.
Furthermore, the release of worldwide known
programming tools like the Google Maps API has
fostered the development of a lot of geographical
web applications and mashups (ProgrammableWeb).
Browsing large collections of geo-referenced
photos is an emerging topic in research (Carboni et
al., 2006). Some works focus on automatic
categorization and classification of images (Sarvas
et al., 2004) to improve usability and to provide the
ability to capture images and events without the
worries of adding tags and metadata. In
(Shneiderman et al., 2004) a combination of photos
annotation, browsing and sharing is proposed with
the aim of supporting exploratory search. In World
Explorer (Ahern et al., 2007) an aggregated
representation of a place is performed getting geo-
referenced photos from Flickr and displaying labels
on the map/aerial photo to relate a place with a
concept. The project “Degree Confluence”
represents an attempt to tie images to the space (The
degree confluence project).
Furthermore, even more mobile devices are able
to browse digital image libraries, thanks to their
large displays and internet connection capabilities
(Bluetooth, Wi-Fi and 3G). However, traditional
mobile picture browsers (Fig. 1), tend to use a static
approach that is not suitable for large datasets,
particularly when geo-referencing data are attached.
In this paper, authors present a novel picture
browsing method, based on embedded GPS and
acceleration sensors in order to create a dynamic
browser able to collect, catalogue and view images
from public web sites like panoramio.com,
according to the geographical orientation of users
carrying their mobile phones.
(a) (b) (c)
Figure 1: Mobile picture browsers (a), (b) use static
navigation tools or smarter and dynamic approach (Nokia
N95 mobile phone) (c).
431
Massidda F., Manca R. and Carboni D.
A MOBILE BROWSER FOR GEO-REFERENCED IMAGES USING AN ACCELEROMETER-BASED COMPASS.
DOI: 10.5220/0001840704310434
In Proceedings of the Fifth International Conference on Web Information Systems and Technologies (WEBIST 2009), page
ISBN: 978-989-8111-81-4
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 MOBILE PICTURE BROWSING
An interesting approach to the visualization of geo-
referenced pictures on desktop has been recently
proposed by the authors (Carboni et al., 2008).
furthermore, effective mobile-embedded
technologies, like a digital compass should allow
new scenarios and new interaction modalities for
portable devices. Unfortunately, at the time we are
writing the paper, mobile terminals with a digital
compass embedded are very few: the Nokia 6210
Navigator and the old Nokia 5140i while, mobile
phones with accelerometers sensors are, instead,
very common Accelerometers have been used in the
recent literature in many research and development
fields: in medical applications, in the automation of
the vehicular navigation, for shock protection
systems, for Robots’ guide automation and, finally,
for human assistance in hazarding and dangerous
working environments. In mobile applications the
accelerometers are used to increase or improve the
interaction or to speed up the textual input (Sung-Do
Choi et al., 2006), (Wigdor et al., 2003).
3 THE
ACCELEROMETER-BASED
COMPASS SIMULATOR
To provide a view of surrounding points of interest
based both on heading and position, the proposed
system must be connected with the GPS system
which main objective is to provide position and not
to provide heading. Nevertheless, if a GPS sensor is
moving fast enough, it is possible to sample two
positions after a short time interval to determine the
heading. Unfortunately this approach is not viable
for slow pedestrian mobility. Using acceleration
sensors to determine heading is a theoretical
solution: the double integral of acceleration gives the
space associated with a movement. This
computation is not practicable on a mobile terminal
and the implementation must take into account a
model for user movements in order to manage the
problem like a pattern recognition problem. To make
this model as simple as possible we restrict the set of
actions to:
• a 90° clockwise body rotation
• a 90° counter-clockwise body rotation
• a pause of stillness
Thus, the problem is now how to recognize in
which of the three actions the actual movement falls.
Noise always affects the samples from the sensors.
We can divide noise into two categories: the first
cause of noise is the user that cannot move exactly
how the algorithm expects especially when the user
is still. Stillness is not real stillness and little
oscillations are perceived by the sensors, so it is
difficult to determine if the body is rotating slowly
or if simply the user believes to be still. The second
cause of noise is in the sensor itself. Even if the
sensor is really still, an offset is often visible.
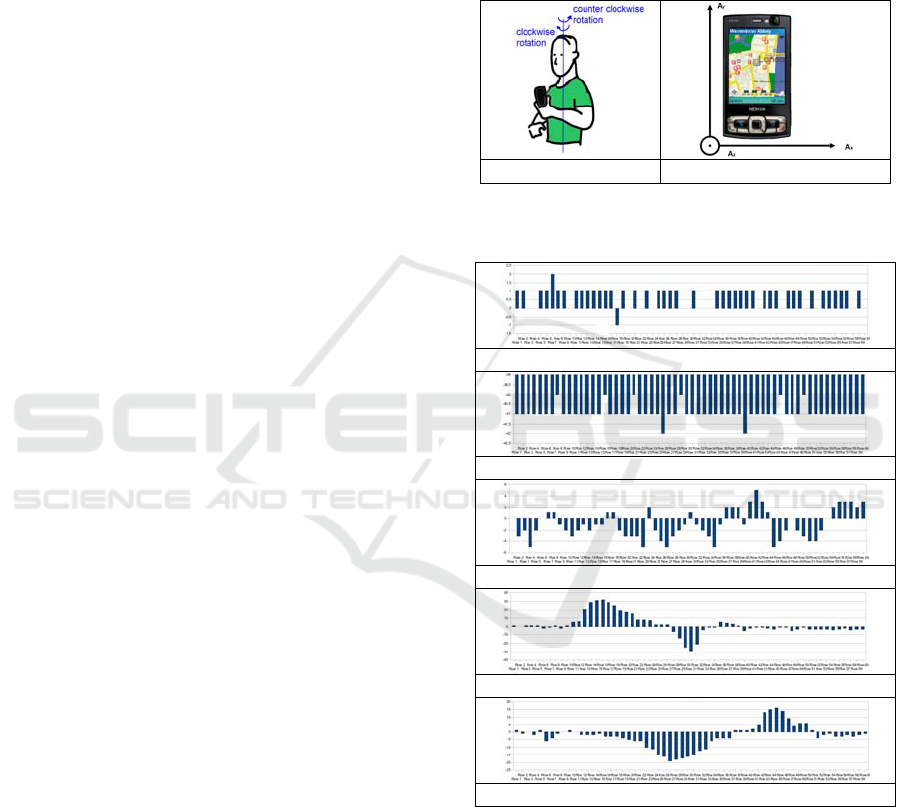
(a) (b)
Figure 2: Reference coordinate systems for users (a) and
accelerometers phone geometry (b).
(a)
(b)
(c)
(d)
(e)
Figure 3: Samples from x-acceleration in different states:
mobile terminal still (a), still but with offsets in one or
more directions (b), with little oscillations (c), counter-
clockwise (d) and clockwise movement (e).
First of all, lets define a common reference
coordinate system as depicted in Fig. 2. It is possible
to monitor and record acceleration data from a
mobile terminal with sensor embedded: Fig. 3 shows
some graphs related to the output data from the x-
WEBIST 2009 - 5th International Conference on Web Information Systems and Technologies
432

component of the acceleration,. It can be observe
that there is a strong correlation between output data
and one of the five possible observation patterns
described above.
Using the chosen reference coordinate system,
and simplifying the problem using only the x-axis
data, it is possible to create a mathematical model
that describes each expected and possible state.
According to Fig. 3.(d) and Fig. 3.(e) and
generalizing them, it is possible to create the relative
(ideal) pattern functions of the x-axis data for a
counter-clockwise and a clockwise rotation of the
body with the following formulas:
)1cos()1sin(
,
ttbttaS
leftx
⋅⋅+⋅⋅=
(1)
)1cos()1sin(
,
ttdttcS
rightx
⋅⋅−⋅⋅−=
(2)
For . Where is the interval size of
the movement done by the user. At the same time, it
is possible to define a formula for the still state:
[
21
,tt
t
=Δ
]
t
Δ
()
10
0
η
η
++≡tS
still
(3)
Where the last two term are noise contribution
respectively from offsets and user oscillations. Once
defined the parameters, learned for each user in
order to better fit the observed samples with one of
the possible states, the system is ready to recognize
movements. Samples are filtered by a set of matched
filters. Matched filters are obtained by correlating
the discretized known template functions with the
observed signal in order to detect the presence of the
template in the observation. Using a Maximum-A-
Posteriori (MAP) criterion, the most probable state
is chosen.
4 THE MOBILE PROTOTYPE
After the definition of both, the mathematical model
describing the codebook of allowed movements and
a MAP decision criterion, a prototype has been
planned.
Despite of the achievable accuracy (in example
increasing the number of cardinal points or using the
three axis acceleration data), a basic prototype has
been implemented. In particular, only the four main
cardinal points have been considered (N,O,S,E).
The idea was that once started the application-
browser, a set of pictures are always shown in the
display. Which set of pictures must be drawn
depends on the current GPS position and the current
heading of the user. An embedded image set is
available but the application is able to connect and
browse geo-tagged pictures directly from panoramio
database, all over the world. Every time the user
changes its geographical orientation, the system
draws (90° clockwise body rotation or 90° counter-
clockwise body rotation) or not (pause of stillness)
other five pictures, choosing them with respect to the
estimated direction.
In order to assign different importance levels to
the different areas closest to the user’s location, a
geographical map is considered and centered in the
user position. The map is divided into four areas,
starting from the central position (P
GPS
) estimated by
the GPS tracker (Fig. 4). Then, each area is further
divided into three different sub-regions A, B, C. If
almost five pictures exist in the A sub-region
corresponding to the direction the user is facing to,
these photos are displayed. Otherwise, remaining
images are taken from the B sub-region and so on.
Figure 4: The partitioning scheme for the geographical
maps.
Figure 5: A snapshot of the application on a Nokia N95.
When the user starts using the application, and
sets the initial point, the pictures are displayed and
the user can start rotating and looking photos
representing places and things around him. A
snapshot of the running prototype is shown in Fig 5.
The Prototype application is freely available and
downloadable in the authors’ website.
A MOBILE BROWSER FOR GEO-REFERENCED IMAGES USING AN ACCELEROMETER-BASED COMPASS
433
5 EXPERIMENTAL TESTS
AND RESULTS
In order to assess the compass simulator efficiency
and the effectiveness of the mobile geo-browser, two
preliminary tests have been developed. We used ten
beta testers in each test: in the first experimental test
(Table1), two different sessions were developed,
using 40 and 80 accelerometer data samples per
second. In both sessions, the software recorded
computing times. In the second experimental test
(Table 2), users were asked to answer a brief
questionnaire with scores ranging from 1 (the worst)
to 5 (the best).
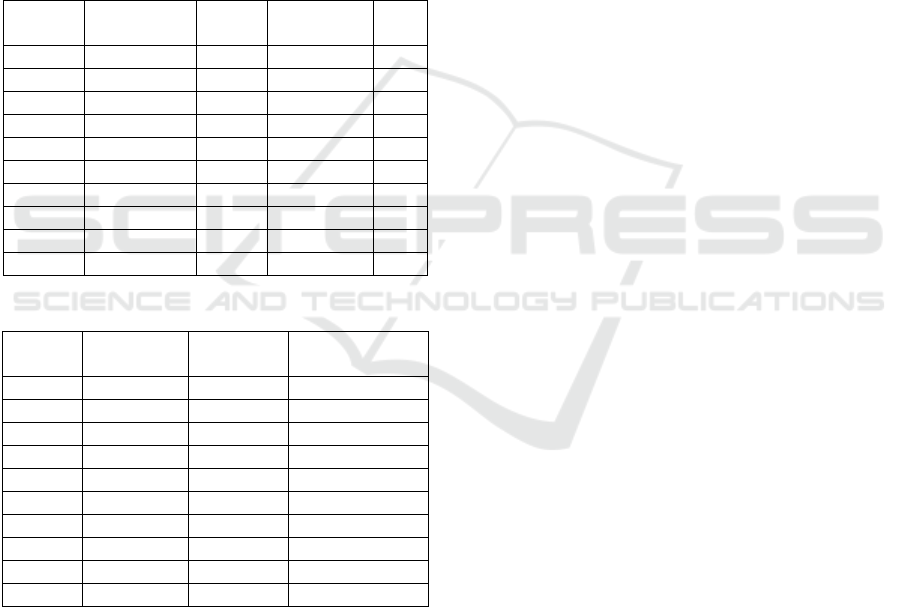
Table 1: Hit Percentage and computational times for the
accuracy tests. Mean times are computed in seconds.
Beta
Testers
% Hit
(40 samples)
Mean
Times
% Hit
(80 samples)
Mean
Times
User #1 93 0.604 97 0.837
User #2 91 0.663 98 0.903
User #3 88 0.597 98 0.881
User #4 90 0.548 95 0.688
User #5 95 0.615 97 0.753
User #6 90 0.771 98 0.899
User #7 93 0.659 97 0.932
User #8 95 0.570 99 0.775
User #9 92 0.588 94 0.874
User #10 89 0.656 97 0.829
Table 2: Results of subjective tests.
Beta
Testers
It is useful? It works? It is fast enough?
User #1 4 4 5
User #2 5 4 5
User #3 3 3 4
User #4 4 5 5
User #5 4 4 4
User #6 5 5 5
User #7 5 4 4
User #8 4 2 4
User #9 5 4 4
User #10 4 4 4
In Table 1, success hit percentages and
computing times for the first experimental test are
reported. Clearly, for all the users the hit percentage
was always greater than 94% when 80 samples were
used. Mean elaboration times increase with the
number of samples but they still remain acceptable
also for the 80 samples session.
The subjective experimental test, despite of its
preliminary characteristic, seams to show a
generalized positive assessment (Table 2).
6 CONCLUSIONS
In this paper a new mobile browser for geo-
referenced pictures has been proposed. Accuracy
results show that the accelerometers-based
simulation technology works already well and users
find very interesting and useful this type of
applications. In order to make the prototype even
more functional and effective, further developments
are under study and planning, like the increasing of
the accelerometer data rate, and the use of samples
from all the three axis sensors. Next generation
mobile terminals will be used to allow the real-time
processing of this bigger amount of data. Extra
capabilities like a map zoom-in/out function will be
embedded in order to better define the areas
interested by the selection of the images displayed
on the mobile terminal.
REFERENCES
ProgrammableWeb - Mashups, APIs, and the Web as
Platform (http://programmableweb.com).
Sarvas, R., Herrarte, E., Wilhelm, A., and Davis, M. (June
06-09, 2004). Metadata creation system for mobile
images, Proc. of the 2nd Int. Conference on Mobile
Systems, Applications, and Services Boston, MA,
USA, MobiSys '04. ACM Press, 36-48. New York, NY.
Shneiderman, B., Bederson, B. B., and Drucker, S. M.
(Apr 04, 2004). Find that photo!: interface strategies to
annotate, browse, and share, Commun. ACM, 49, 69-71.
Ahern, S., Naaman, M., Nair, R., and Yang, J. H. (June
18-23, 2007). World explorer: visualizing aggregate
data from unstructured text in geo-referenced
collections, In Proceedings of the 2007 Conference on
Digital Libraries Vancouver, Canada, JCDL '07. ACM
Press, 1-10. New York, NY,.
The degree confluence project. (http://www.confluence.org).
Carboni, D., Sanna, S., and Zanarini, P (September 12-15,
2006). GeoPix: image retrieval on the geo web, from
camera click to mouse click, In Proceedings of the 8th
Conference on Human-Computer interaction with Mobile
Devices and Services, Helsinki, Finland. MobileHCI '06,
vol. 159. ACM Press, 169-172. New York, NY.
Sung-Do Choi, Lee, A.S. Soo-Young Lee (August, 2006),
On-Line Handwritten Character Recognition with 3D
Accelerometer, 2006 IEEE International Conference
on Information Acquisition, (pp. 845-850). Weihai.
Daniel Wigdor, Ravin Balakrishnan. TiltText: Using Tilt
for Text Input to Mobile Phones (2003), Department of
Computer Science, University of Toronto
(www.dgp.toronto.edu).
D. Carboni, V. Marotto, F. Massidda, and P. Zanarini
(September 10, 2008). Fractal Browsing of Large
Geo-Referenced Picture Sets, 2nd International
Workshop on Distributed Agent-based Retrieval
Tools. Cagliari, Italy.
WEBIST 2009 - 5th International Conference on Web Information Systems and Technologies
434
