
EAR SEGMETATION USING TOPOGRAPHIC LABELS
Milad Lankarany and Alireza Ahmadyfard
Department of Electrical Engineering and Robotics, Shahrood University of Technology, Shahrood, Iran
Keywords: Ear Biometrics, Ear Segmentation, Topographic Features.
Abstract: Ear segmentation is considered as the first step of all ear biometrics systems while the objective in
separating the ear from its surrounding backgrounds is to improve the capability of automatic systems used
for ear recognition. To meet this objective in the context of ear biometrics a new automatic algorithm based
on topographic labels is presented here. The proposed algorithm contains four stages. First we extract
topographic labels from the ear image. Then using the map of regions for three topographic labels namely,
ridge, convex hill and convex saddle hill we build a composed set of labels. The thresholding on this
labelled image provides a connected component with the maximum number of pixels which represents the
outer boundary of the ear. As well as addressing faster implementation and brightness insensitivity, the
technique is also validated by performing completely successful ear segmentation tested on “USTB”
database which contains 308 profile view images of the ear and its surrounding backgrounds.
1 INTRODUCTION
Ear images can be acquired in a similar manner to
face images and a number of researchers have
suggested that the human ear is unique enough to
each individual to allow practical use as a biometric.
Bhanu and Chen (2003) presented a 3D ear
recognition method using a local surface shape
descriptor. Twenty range images from 10 individuals
are used in the experiments and a 100 percent
recognition rate is reported. Chen and Bhanu (2005)
used a two-step ICP algorithm on a data set of 30
subjects with 3D ear images. They reported that this
method yielded two incorrect matches out of 30
people. In these two works, the ears are manually
extracted from profile images. They also presented
an ear detection method in (Bhanu, 2004). In the
offline step, they built an ear model template from
each of 20 subjects using the average histogram of
the shape index. In the online step, first, they used
step edge detection and thresholding to find the
sharp edge around the ear boundary and then applied
dilation on the edge image and connected
component labelling to search for ear region
candidates. Each potential ear region is a rectangular
box, and it grows in four directions to find the
minimum distance to the model template. The region
with minimum distance to the model template is the
ear region. They get 91.5 percent correct detection
with a 2.5 percent false alarm rate. No recognition
results are reported based on this detection method.
Hurley et al developed a novel feature extraction
technique using force field transformation. Each
image is represented by a compact characteristic
vector which is invariant to initialization, scale,
rotation, and noise. The experiment displays the
robustness of the technique to extract the 2D ear.
The data set comes from the XM2VTS face image
database. Choras introduces an ear recognition
method based on geometric feature extraction from
2D images of the ear. The geometric features are
computed from the edge detected intensity image.
They claim that error-free recognition is obtained on
“easy” images from their database. The “easy”
images are images of high quality with no earring
and hair covering and without illumination changes.
No detailed experimental setup is reported.
There are a number of algorithms based on force
field transforms to deal with segmentation. Luo et al
describe the use of Vector Potential to extract
corners by treating the “Canny” edge map of an
image as a current density. Ahuja used a novel force
field segmentation technique where pixels of similar
intensity were detected by assigning inter-pixel
forces inversely proportional to the grey level
difference. Ahuja and Chuang used a potential field
model to extend the medial axis transform. Xu and
Prince extended the active contour model by
186
Lankarany M. and Ahmadyfard A. (2009).
EAR SEGMETATION USING TOPOGRAPHIC LABELS.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 186-191
DOI: 10.5220/0001797601860191
Copyright
c
SciTePress
replacing the external local force with a force field
derived from the image edge map.
Yan et al present the first fully automated system
for ear biometrics using 3D shape. There are two
major parts of the system: automatic ear region
segmentation and 3D ear shape matching. Starting
with the multimodal 3D + 2D image acquired in a
profile view, the system automatically finds the ear
pit by using skin detection, curvature estimation, and
surface segmentation and classification. After the ear
pit is detected, an active contour algorithm using
both colour and depth information is applied to
outline the visible ear region.
Except the Yan's method that automatically
approached ear-segmentation using 3-D information
of the profile images, the works based on edge
detection algorithms present automated approaches
for ear-segmentation using only 2-D images of the
ear. In this case, the edge image of the ear and
surroundings is first obtained then distinctive
contours are recognized. It is experimentally
concluded that the contour which includes the
maximum number of pixels, points out to the edge
of outer ear. Therefore the ear boundary can be
found easily according to that contour. However,
this technique suffers two main problems. First
problem is caused by the dependence of edge
detection algorithms to thresholding value. Second
one arises from the discontinuity of contours
obtained from the edge detector. In some cases,
several pixels of a same contour, which is detectable
using human’s eyes, are disconnected therefore; the
separated contours are recognized wrongly. This
effect is illustrated in figure 1.
(a) (b) (c)
Figure 1: (a). A profile image from USTB database, (b).
The edge image using “canny” operator with threshold 0.2
(c). The edge image with threshold 0.1 (the red line and
ellipse show the discontinuity of contours).
These problems motivated us to use a method
leading to obtain more reliable regions (instead of
edge contours) free from threshold selection.
Providing this purpose, we used topographic map of
ear image and label it. Each pixel in ear image is
described by one of the twelve topographic labels.
No predefined threshold is needed to label the image
in this manner. On the other hand, more geometric
properties of the ear image are yielded. Three labels,
namely, ridge, convex hill and convex saddle hill
which are selected experimentally, are combined in
order to extract the ear outline. More consideration
in outer ear shape shows that this part of ear is fully
described by the convex hill and convex saddle hill
labels. Moreover the ridge label in the ear image is
similar to the image edges, but the extraction of the
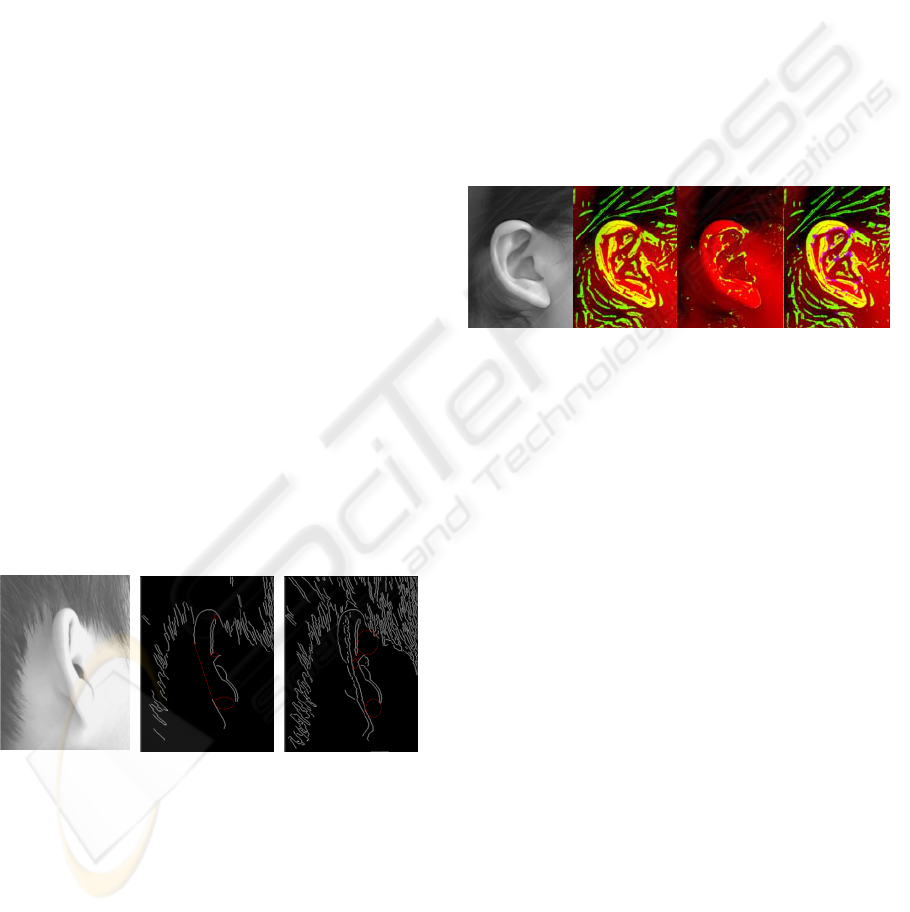
ridge label is independent of threshold value. Figure
2 shows the each of those labels extracted from a
test ear. It is experimentally concluded that the
connected component obtained from the
combination of topographic labels consisting of the
maximum number of pixels matches to the image of
outer ear. As a result the boundary of this region
demonstrates the ear in an ear image.
(A) (B) (C) (D)
Figure 2: (A). Selected image from USTB database, (B).
Green part shows the convex hill label, (C). Green part
indicates the convex sadlle hill, (D). Green part shows
convex hill and blue part shows the convex saddle hill
label, all extracted from selected ear image.
2 TOPOGRAPHIC LABELS
Using topographic models for representing images
has been reported in computer vision literature
((M.Haralick, 1983), (J.Wang, 2007)). This method
is classified in appearance based category. The main
advantage of using topographic features for
representation respect to intensity is its robustness to
lighting condition (L.Wang, 1993).
Consider a grey scale ear image as a surface in 3D
space where x and y axes are along image
dimensions. The value of surface at pixel (x,y) is the
pixel intensity f(x,y). Depending on the topographic
property of surface at each pixel one of twelve
topographic labels in Figure 3 is assigned to the each
pixel. In order to label intensity image based on
topographic property let us consider the input image
as a continues function f(x,y). The topographic label
at each pixel of image is determined using first and
second order derivatives on surface f.
EAR SEGMETATION USING TOPOGRAPHIC LABELS
187
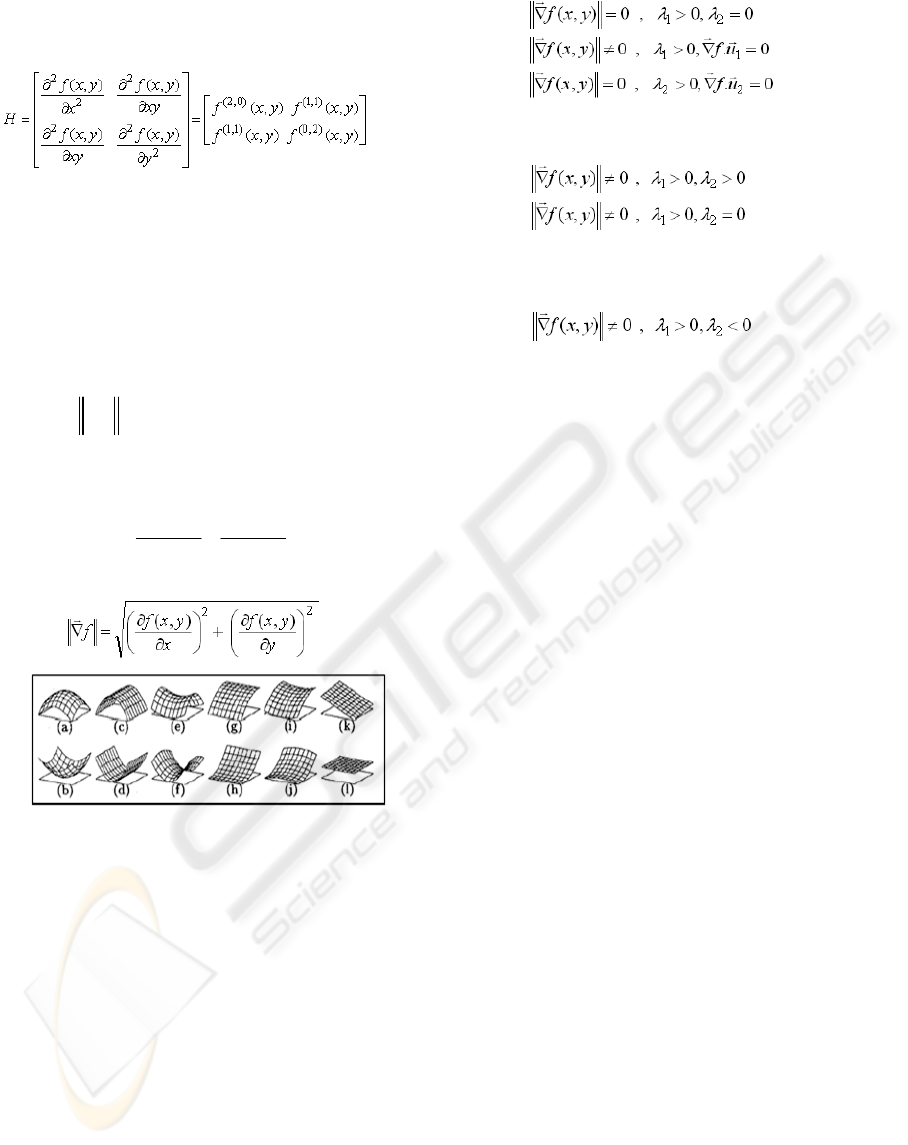
Considering the Hessian matrix of this function as
follows:
(1) (1)
After applying eignvalue decomposition to the
Hessian matrix we have:
12 12 12
[].().[... ... ]
T
T
HUDU
uudiag uu
λλ
==
(2)
Where
21
,uu
rr
point out to the eigenvectors of H and
21
,
λλ
are the eigenvalues of the Hessian matrix.
Also
ff ∇∇
rr
,
correspond to the derivative vector
of function
f
(the surface intensity) and its
magnitude, respectively, should be computed.
(,) (,)fxy fxy
f
xy
⎛⎞
∂∂
∇= −
⎜⎟
∂∂
⎝⎠
ur
(3)
(4)
Figure 3: Topographic labels (a) peak (b) pit (c) ridge (d)
ravine (e) ridge saddle (f) ravine saddle (g) convex hill (h)
concave hill (i) convex saddle hill (j) concave saddle hill
(k) slop hill and (l) flat.
In this part we only consider the labels used in this
paper. These labels are ridge, convex hill, convex
saddle hill. For further details on determining other
topographic labels one can refer to (L.Wang, 1993).
It is worth to note that image noise can cause an
undesired result of topographic labelling. As shown
by Wang et al (1993) a smoothing filter before
topographic labelling provide more acceptable
result. For this purpose we filter input image using a
Gaussian kernel before the labelling. The filter
parameters should be selected based on the size of
interest pattern (ear) and the level of input noise.
Ridge: this label assigns to pixel (x,y) if one of the
following criteria is satisfied.
(5) (5)
Convex hill: this label assigns to pixel (x,y) if one of
the following criteria is satisfied.
(6)
Convex saddle hill: this label assigns to pixel (x,y)
if the following criterion is satisfied.
(7)
Figure 4 (up) is plotted to indicate 3 mentioned
labels extracted of figure 2.A.
3 EAR SEGMENTATION
A. Label Extraction: according to last section, 3
labels, namely, ridge, convex hill and convex saddle
hill are extracted from each profile image. Figure 4
(down) shows the combination of these labels.
B. Thresholding: the image approached by
combining those three labels is binary (intensities
are “0” or “1”). The pixels whose intensities are “1”
are replaced by their original intensity values from
the profile image. These values are scaled in the
range of grey level (“0” to “255”). The achieved
image is enhanced by using histogram equalization.
At last by defining threshold value as “150” (in grey
level) the pixels whose intensity values are lower
than that threshold are mapped to “0” and the other
pixels give “1” as their intensity value. Figure 5
demonstrates the image yielded by using this step. It
should be noted that this step is not an essential part
of our algorithm and the proposed algorithm
operates accurately without using this step. But a
considerable reduction in computation complexity is
achieved by using this step. As compared with figure
4 (down), the excessive contours around the ear can
be easily omitted using this step.
C. Finding the Region of Outer Ear: as mentioned
in introduction, it is experimentally concluded that
the contour which contains the maximum number of
pixels covers the region of the outer ear. Figure 6
shows this contour which is extracted of figure 5.
For this purpose (finding the contours of a binary
image) we use “bwlabel” a command of MATLAB.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
188

Figure 4: Up. Three topographic labels obtained for profile image shown in figure 2.A Down. The combination of those
labels.
Figure 5: The combination of three mentioned topographic
labels after thresholding.
Figure 6: the contour includes the maximum number of
pixels.
D. Two Landmark Points: because the features for
a recognition algorithm should be invariant to
translation and scale change, the normalization step
is performed. The normalization process is done
with respect to scale and rotation. This is done by
finding a two point land mark (figure 7) in every
contour approached in step C. These two points can
be easily determined by finding the pixels assigned
to maximum and minimum values of coordinate axis
in the vertical direction.
Figure 7: Two landmark points, which correspond to
maximum and minimum values of vertical axis, are
identified in the contour approached in step C followed by
dilating.
E. Scaling and Rotation: After detecting those
points, the profile image is transformed with respect
to those landmarks to a new location. This
transformation will result in getting the landmark
EAR SEGMETATION USING TOPOGRAPHIC LABELS
189

points in all images to have the same distance
between them and that orientation of the line
connecting the two landmark points will be vertical
in the image. Figure 8 demonstrates the result of this
normalization applied to profile image shown in
figure 2.A.
Figure 8: The result of normalization of profile image with
respect to rotation.
F. Foure Landmark Points: step E (normalization)
is first applied to the contour yielded in step C then,
a 4 point landmark, which are shown in figure 9.A,
are selected by finding the maximum and minimum
values of coordinate axises in both vertical and
horizontal directions. A rectangular window
separates the region of normalized ear from it’s
surroundings based on points obtained in step F.
Figure 9.B shows this window.
At last by applying this window to the
normalized profile image approached in step E, the
segmented ear will be obtained.
(A) (B)
Figure 9: (A). Four land mark points founded in the
normalized contour which approached by applying step E
to the contour obtained in step C, (B). The window which
is drawn based on the landmark points.
3.1 Segmentation Results
Our algorithm achieves fully successful ear
segmentation on USTB database which includes 77
subject dataset, 4 images for each subject. Some
profile images selected of our used database are
shown in figure 10.A. Ear segmentation based on
proposed algorithm achieves 100 percent true
segmentation while applying edge detection
algorithm according to “Canny” method, yielded
67.2 percent true segmentation. Both methods are
tested on the USTB database. Wrong segmentation
corresponds to incomplete separation of ear from
surroundings. Figure 10.B demonstrates some
segmented ears, which are separated from profile
images shown in figure 10.A, approached by our
proposed algorithm.
Figure 10: A. Some samples from ear images in USTB database (first row), B. The results of segmentation of the first row
using the proposed algorithm (second row).
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
190

4 CONCLUSIONS
We have presented an automatic ear segmentation
approach using 2D images. The automatic ear
extraction algorithm can separate the ear from
surrounding area including hair. The proposed
method uses topographic labels to obtain a reliable
region representing outer ear. The experimental
results demonstrate the power of our automatic ear
extraction algorithm when it is compared with edge
detection based techniques. The proposed system
successfully segments all ear images in USTB
database.
REFERENCES
Ping Yan and Kevin W.Bowyer “Biometric Recognition
Using 3-D Ear Shape”, IEEE Trans. PAMI, VOL. 29,
NO. 8, 2007
David J. Hurley, Mark S. Nixon, John N. Carter “Force
Field Feature Extraction for Ear Biometrics”,
Computer Vision and Image Understanding
ELSEVIER.
B. Bhanu and H. Chen, “Human Ear Recognition in 3D,”
Proc.Workshop Multimodal User Authentication, pp.
91-98, 2003.
D. Hurley, M. Nixon, and J. Carter, “Force Field Energy
Functionals for Image Feature Extraction,” Image and
Vision Computing J., vol. 20, pp. 429-432, 2002.
H. Chen and B. Bhanu, “Human Ear Detection from Side
Face Range Images,” Proc. Int’l Conf. Image
Processing, pp. 574-577, 2004.
H. Chen and B. Bhanu, “Contour Matching for 3D Ear
Recognition,” Proc. Seventh IEEE Workshop
Application of Computer Vision,pp. 123-128, 2005.
K. Messer, J. Matas, J. Kittler, J. Luettin, and G. Maitre,
“XM2VTSDB: The Extended M2VTS
Database,”Audio and Video-Based Biometric Person
Authentication, pp. 72-77, 1999.
M. Choras, “Ear Biometrics Based on Geometrical Feature
Extraction,” Electronic Letters on Computer Vision
and Image Analysis, vol. 5, pp. 84-95, 2005.
M. Choras, “Further Developments in Geometrical
Algorithms for Ear Biometrics,” Proc. Fourth Int’l
Conf. Articulated Motion and Deformable Objects, pp.
58-67, 2006.
B. Luo, A.D. Cross, E.R. Hancock, “Corner detection via
topographic analysis of vector potential”, Pattern
Recognition Letter. 20 (6) (1999) 635–650.
N. Ahuja, “A transform for multiscale image segmentation
by integrated edge and region detection”, IEEE Trans.
PAMI 18 (12) (1996) 1211–1235.
N. Ahuja, J.H. Chuang, Shape representation using a
generalized potential field model, IEEE Trans. PAMI
19 (2) (1997) 169–176.
Li Yuan, Zhichun Mu, Zhengguang Xu, “Using Ear
Biometrics for Personal Recognition”, IWBRS 2005,
Beijing, China, October 2005, 221-228.
C. Xu, J.L. Prince, “Gradient vector flow: a new external
force for snakes”, in: Proc. IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR), 1997, pp.
66–71.
R. M. Haralick. L. T. Watson, and T. J. Laffey, "The
topographic primal sketch," Int. J . Robotics Res. vol.
2, pp. 50-72, 1983.
J. Wang, and L. Yin, "Static topographic modeling for
facial expression recognition and analysis," Computer
Vision and Image Understanding Journal, vol. 108, pp.
19-34, October 2007.
L. Wang, and T. Pavlidis."Direct Gray-Scale Extraction of
Features for Character Recognition",IEEE Trans.
PAMI. vol. 15, no. 10, pp.1053-1067, October 1993.
EAR SEGMETATION USING TOPOGRAPHIC LABELS
191
