
ASSIGNING AUTOMATIC REGULARIZATION PARAMETERS IN
IMAGE RESTORATION
Ignazio Gallo and Elisabetta Binaghi
Universit
`
a degli Studi dell’Insubria, via Ravasi 2, Varese, Italy
Keywords:
Regularization profile, Image restoration, Adaptive regularization, Neural networks.
Abstract:
This work aims to define and experimentally evaluate an adaptive strategy based on neural learning to select
an appropriate regularization parameter within a regularized restoration process. The appropriate setting of
the regularization parameter within the restoration process is a difficult task attempting to achieve an optimal
balance between removing edge ringing effects and suppressing additive noise. In this context,in an attempt to
overcome the limitations of trial and error and curve fitting procedures we propose the construction of the reg-
ularization parameter function through a training concept using a Multilayer Perceptron neural network. The
proposed solution is conceived independent from a specific restoration algorithm and can be included within
a general local restoration procedure. The proposed algorithm was experimentally evaluated and compared
using test images with different levels of degradation. Results obtained proven the generalization capability of
the method that can be applied successfully on heterogeneous images never seen during training.
1 INTRODUCTION
Restoration of blurred and noisy images requires the
adoption of a regularization approach based on the
specification of a cost function consisting of a least
square term and a regularization term (Lagendijk and
Biemond, 2001; Andrews and Hunt, 1977). The role
of the two terms is controlled by the regularization pa-
rameter. The appropriate setting of the regularization
parameter within the restoration process achieves an
optimal balance between removing edge ringing ef-
fects and suppressing additive noise.
The critical problem of optimally estimating the
regularization parameter has been investigated in
depth in literature.
Previous works addressed the problem by propos-
ing a regularization profile where the local parame-
ter value is expressed as a monotonically decreasing
function of the local variance (Qian and Clarke, 1996;
Lagendijk et al., 1988; Katsaggelos and Kang, 1995).
In particular Perry and Guang (Perry and Guan, 2000)
proposed a perceptually motivated solution in which
the constraint values decrease linearly as the loga-
rithm of the local regional variance increases. Pro-
ceeding from these results, in a previous work we de-
fined a statistics-based procedure assigning a separate
parameter to each image pixel according to local vari-
ance computed in the neighborhood of the pixel to be
examined.
The regularization parameter is specified for each
pixel as λ(x, y) = Y (S(x, y)) where S(x, y) is the lo-
cal variance of the degraded input image g varying
from S
min
to S
max
, while Y corresponds to the log-
linear function:
Y (S; λ
min
, λ
max
) = (1)
=
λ
min
− λ
max
S
max
− S
min
(log(S) − S
min
) + λ
max
To determine the function Y univocally and then build
a specific regularization profile, we need to fix values
λ
min
and λ
max
corresponding to S
max
and S
min
respec-
tively.
The present work proposes a novel approach to
regularization profile estimation based on the approx-
imation capability of the supervised neural learning
technique based on Multilayer Perceptron Network
(MLP). The interest in this novel strategy mainly lies
in the possibility of inducing the regularization func-
tion from a set of training images, directly mapping
local variance values and/or other image features to
regularization parameters without requiring trial and
error and curve fitting procedures.
74
Gallo I. and Binaghi E. (2009).
ASSIGNING AUTOMATIC REGULARIZATION PARAMETERS IN IMAGE RESTORATION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 74-77
DOI: 10.5220/0001785500740077
Copyright
c
SciTePress
2 THE PROPOSED METHOD
The proposed method for regularization parameter
assignment is conceived as a pre-processing phase
within a general restoration strategy. To make the pa-
per self-contained and to exploit all the ingredients of
the overall strategy adopted in the experimental part
of the work, we briefly outline the salient aspects of a
restoration strategy developed and presented in a pre-
vious study. It consists of a neural iterative method
which uses a gradient descent algorithm to minimize
a local cost function derived from a traditional global
constrained least square measure (Gallo et al., 2008).
In particular, the degradation measure to be min-
imized is a local cost function E(x, y) defined at any
point (x, y) in an M × N image:
E(x, y) =
1
2
g(x, y) − h ∗
ˆ
f (x, y)
2
+ (2)
+
1
2
λ(x, y)
d ∗
ˆ
f (x, y)
2
where h ∗
ˆ
f (x, y) denotes the convolution between a
blur filter h centered in a point (x, y) of the restored
image
ˆ
f and the restored image
ˆ
f itself; d ∗
ˆ
f (x, y)
denotes the convolution between a high-pass filter d
centered in a point (x, y) of the restored image
ˆ
f and
the restored image
ˆ
f itself.
A multilayer perceptron model, trained with
the supervised back propagation learning algo-
rithm (Rumelhart et al., 1986), was adopted to com-
pute the regularization parameter based on specific
local information extracted from the degraded image
g(x, y) previously scaled in a range [0, 1]. The neural
learning task accomplished within the neural training
phase can be formulated as a search for the best ap-
proximation of the function λ(x, y) =Y (S
m
) where S
m
represents a set of statistical measures extracted di-
rectly from the degraded image. The present work
uses S
m
= (S
1
(x, y), S
2
(x, y), S
3
) where S
1
is the lo-
cal variance computed directly on the degraded im-
age and S
2
is the local variance computed on the de-
graded image smoothed with a Gaussian low-pass fil-
ter. In particular we use the variance calculated in a
window measuring 3 × 3 as statistical measure S
1
and
the variance calculated in a window measuring 5 × 5
as statistical measure S
2
.
The joint use of S
1
and S
2
is motivated by the need
to preserve image features during restoration. S
3
is a
constant value derived from the histogram of S
1
. In
particular S
3
is the value of variance corresponding to
the peak value in the histogram. This is an important
feature because it is directly correlated to the amount
of noise in the degraded image and we know that λ
should be proportional to the amount of noise in the
data (Inoue et al., 2003).
The training set presented to the neural network
for the supervised learning task is constituted by
N pairs of elements ((S
1
, S
2
, S
3
),
ˆ
λ
j
)
n
where n =
1, . . . , N. The second component of training examples
ˆ
λ
j
are the expected outputs for the corresponding in-
put components and are constituted by regularization
values obtained from successful restoration processes
as explained in section 2.1.
The trained network is expected to be able to gen-
eralise, i.e. to associate adequate regularization val-
ues with degraded input images never seen during
training.
2.1 Regularization Profile Construction
Representative samples of the function λ(x, y) =
Y (S
m
) are necessary if we want to train a neural net-
work that represents it. Algorithm 1 describes in de-
tails the method used to compute a sampling of this
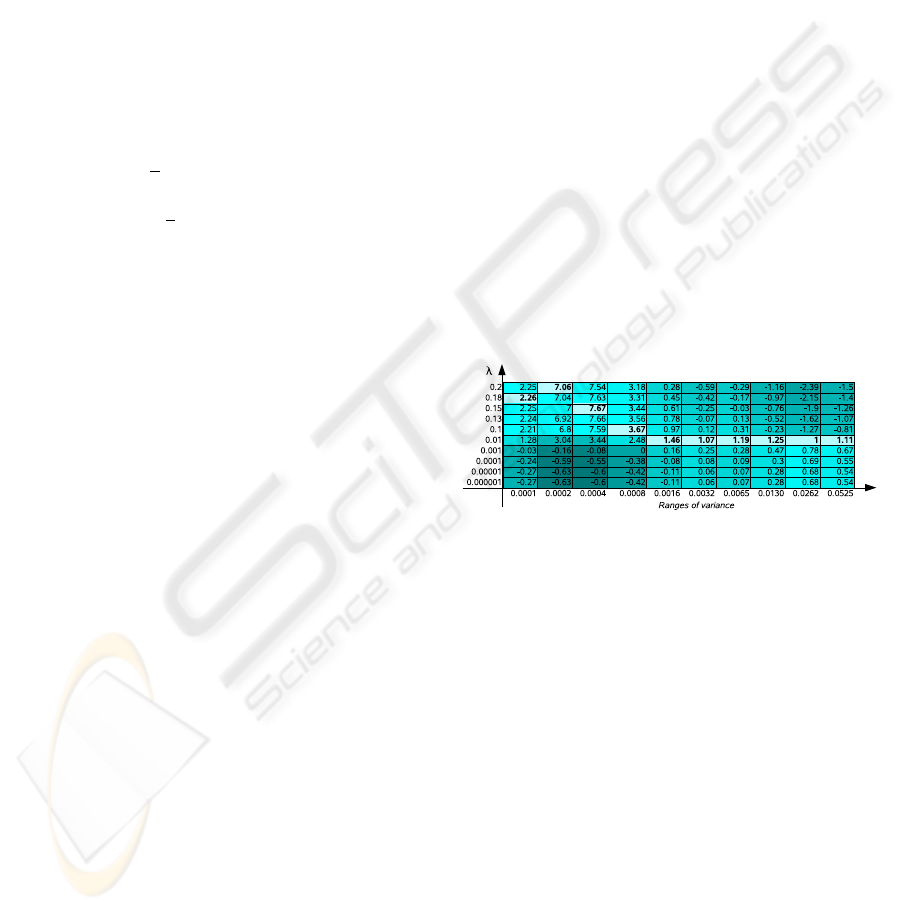
function while Figure 1 shows an example of tabular
data obtained from the same algorithm. Representa-
tive samples of the function λ(x, y) = Y (S
m
) must be
presented to the network during the training phase for
learning. Algorithm 1 describes the procedure used to
build the sample pairs ((S
1
, S
2
, S
3
),
ˆ
λ
j
)
n
.
Figure 1: The columns list the ISNR values obtained restor-
ing the image with a set of different constant λ values. Each
column identifies a group of pixels with variance included
in a prefixed range. The best λ value for a given range of
variance corresponds to the highest ISNR values obtained
(in bold) .
Our approach compares the improvement in sig-
nal to noise ratio (ISNR) measures calculated on a set
of restored pixels
ˆ
f (x, y), all having a statistical mea-
sure included in an interval I
i
≤ S(x, y) < I
i+1
. Then
we choose the best
ˆ
λ corresponding to the best ISNR.
The result of this approach is an approximation of the
function λ(x, y) = Y (S
m
) representing the regulariza-
tion profile with which to compute the regularization
parameter.
The training set is built applying Algorithm 1 to a
set of images representative of a given domain. To be
exhaustive, each image in turn must be degraded with
different levels of noise and different kinds of blur.
ASSIGNING AUTOMATIC REGULARIZATION PARAMETERS IN IMAGE RESTORATION
75

Algorithm 1 - function λ(x, y) = Y (S
m
) sampling.
Require: to select a degraded image g(x, y) and the
corresponding undistorted image f (x, y);
Require: to break in R regular intervals I
1
, . . . , I
R
the
range [log(S
1,min
), log(S
1,max
)];
Require: to define a set of L regularization parame-
ters Λ = {λ
1
, . . . , λ
L
};
1: for j = 1 to L do
2: for s = 1 to R do
3: restore all the pixels belonging to the inter-
val I
s
using λ
j
as regularization parameter;
4: select the best parameter
ˆ
λ
j
, for all the pixels
belonging to the interval I
s
, choosing what
has maximized the ISNR measure;
5: end for
6: end for
7: Pattern set extraction
3 EXPERIMENTS
The proposed algorithm was experimentally evalu-
ated and compared using the six test images shown
in Figure 2. Images (a-c) were used to generate the
training set while images (d-f) were used as a test.
In the experiments all the test images were de-
graded by a Gaussian filter having standard deviation
σ
x
= σ
y
= 1.0 and corrupted by Gaussian noise hav-
ing standard deviation σ = 5, 15, 25. During the train-
ing set construction, the blurred images (a-c) of Fig-
ure 2 without added noise, were also used.
Referring to Algorithm 1, the parameters used in
the experiments were:
• R = 15: the range of variance of each image used
in training was split into 15 intervals;
• for each interval, up to 300 patterns were selected;
• L = 15: the constant regularization param-
eters used in each interval Λ = {0.000001,
0.00001, 0.0001, 0.001, 0.01, 0.028, 0.046,
0.064, 0.082, 0.1, 0.12, 0.14, 0.16, 0.18, 0.2};
• the restoration algorithm was run for 20 iterations
for each different λ
j
applied to each range I
i
con-
sidered.
The input pattern was created by reading pixel val-
ues in a window 3× 3 centered on a particular pixel in
the two images S
1
(x, y) and S
2
(x, y). To these values
we added S
3
which is a constant value for each image.
In this way the network used has 19 input neurons, a
single output neuron and a hidden layer with 38 neu-
rons. The network was trained for 1000 epochs over
all the training examples.
(a) (b)
(c) (d)
(e) (f)
Figure 2: Undistorted images used in training: Lena (a), Cat
(b), A (c); undistorted test images: Moon (d), Board (e) and
Fingerprint (f).
To evaluate the restoration performances of our
approach quantitatively, the well-known Improve-
ment in Signal-to-Noise Ratio (ISNR) measure (Ban-
hom and k. Katsaggelos, 1997) was adopted. This can
be estimated as follows:
ISNR = 10log
10
∑
x,y
( f (x, y) − g(x, y))
2
∑
x,y
( f (x, y) −
ˆ
f (x, y))
2
!
(3)
where g(x, y) is the given degraded image and
ˆ
f (x, y)
is the restored image. This measure can only be eval-
uated for controlled experiments in which the blur and
noise have been synthetically introduced. The maxi-
mally achievable ISNR depends strongly on the con-
tent of the image, the type of blur considered and the
signal-to-noise ratio of the blurred image.
Table 1 summarizes the ISNR values obtained
restoring all the images shown in Figure 2 with differ-
ent levels of degradation. The ISNR values are always
positive except for one case where the image to be re-
stored was corrupted by a smaller amount of noise.
However, comparing the ISNR values obtained with
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
76
our algorithm (Table 1) and the ISNR values obtained
with the algorithm proposed in (Gallo et al., 2007)
and showed in Table 2, the results are very similar.
Table 1: ISNR measure obtained from the restoration of all
the pictures shown in Figure 2. The neural network was
trained for 1000 epochs on a subset of pixels extracted from
images Lena, A, and Cat. Finally the same network was
tested on images Moon, Fingerprint and Board.
Training Test
Image noise isnr Image noise isnr
Lena 5 2.05 Moon 5 0.42
Lena 15 7.35 Moon 15 4.16
Lena 25 9.40 Moon 25 6.45
A 5 0.24 Fingerpr. 5 -2.51
A 15 0.87 Fingerpr. 15 1.66
A 25 1.53 Fingerpr. 25 3.02
Cat 5 2.07 Board 5 1.72
Cat 15 7.19 Board 15 3.85
Cat 25 9.09 Board 25 5.41
Table 2: Best restoration results obtained by a different al-
gorithm using a trial and error approach.
Image noise (σ) λ
min
λ
max
ISNR
Cat 5 0.000001 0.1 2.33
Cat 15 0.000001 0.2 7.31
Cat 25 0.15 0.2 9.13
4 CONCLUSIONS
As seen in our experimental context, the proposed
method for automatically assigning regularization pa-
rameters during restoration produces successful re-
sults and can be conceived as a general model for
adaptive regularization assignment within a restora-
tion procedures. The generalization capability of the
network used for estimating the regularization profile
was proven using a different set of images for training
and test phases. Results obtained ensure that the solu-
tion proposed can be conceived for operational tools
addressing collections of heterogeneous images with-
out the need for retraining.
Future works will attempt to improve the feature
extraction/selection task to capture essential represen-
tative image features and investigate the generaliza-
tion capacity of the neural model in depth in relation
to different imagery.
REFERENCES
Andrews, H. C. and Hunt, B. R. (1977). Digital Image
Restoration. Prentice-Hall, New Jersey.
Banhom, M. R. and k. Katsaggelos, A. (1997). Digital im-
age restoration. IEEE Signal Processing Mag.
Gallo, I., Binaghi, E., and Macchi, A. (2007). Adaptive im-
age restoration using a local neural approach. In 2nd
International Conference on Computer Vision Theory
and Applications.
Gallo, I., Binaghi, E., and Raspanti, M. (2008). Semi-blind
image restoration using a local neural approach. In
Signal Processing, Pattern Recognition, and Applica-
tions, pages 227–231.
Inoue, K., Iiguni, Y., and Maeda, H. (2003). Image restora-
tion using the rbf network with variable regularization
parameters. Neurocomputing, 50:177–191.
Katsaggelos, A. K. and Kang, M. G. (1995). Spatially adap-
tive iterative algorithm for the restoration of astronom-
ical images. Int. J. Imaging Syst. Technol., 6:305–313.
Lagendijk, R. L. and Biemond, J. (2001). Iterative Identi-
fication and Restoration of Images. Springer-Verlag
New York, Inc., Secaucus, NJ, USA.
Lagendijk, R. L., Biemond, J., and Boekee, D. E. (1988).
Regularized iterative image restoration with ringing
reduction. Acoustics, Speech, and Signal Processing,
36(12):1874–1888.
Perry, S. W. and Guan, L. (2000). Weight assignment for
adaptive image restoration by neural networks. IEEE
Trans. on Neural Networks, 11:156–170.
Qian, W. and Clarke, L. P. (1996). Wavelet-based neural
network with fuzzy-logic adaptivity for nuclear image
restoration. In Proceedings of the IEEE, volume 84,
pages 1458–1473.
Rumelhart, H., Hinton, G. E., and Williams, R. J. (1986).
Learning internal representation by error propagation.
Parallel Distributed Processing, pages 318–362.
ASSIGNING AUTOMATIC REGULARIZATION PARAMETERS IN IMAGE RESTORATION
77
