
FUSION OF MOTION SEGMENTATION WITH ONLINE ADAPTIVE
NEURAL CLASSIFIER FOR ROBUST TRACKING
Sławomir B ˛ak
Institute of Computing Science, Poznan University of Technology, ul. Piotrowo 2, Poznan, Poland
Sundaram Suresh, Francois Brémond, Monique Thonnat
INRIA Sophia Antipolis, PULSAR group
2004, route des Lucioles, BP93
06902 Sophia Antipolis Cedex, France
Keywords:
Object tracking, Neural network, Gaussian activation function, Feature extraction, On-line learning, Motion
segmentation, Reliability classification.
Abstract:
This paper presents a method to fuse the information from motion segmentation with online adaptive neural
classifier for robust object tracking. The motion segmentation with object classification identify new objects
present in the video sequence. This information is used to initialize the online adaptive neural classifier which
is learned to differentiate the object from its local background. The neural classifier can adapt to illumination
variations and changes in appearance. Initialized objects are tracked in following frames using the fusion
of their neural classifiers with the feedback from the motion segmentation. Fusion is used to avoid drifting
problems due to similar appearance in the local background region. We demonstrate the approach in several
experiments using benchmark video sequences with different level of complexity.
1 INTRODUCTION
Visual tracking of objects in complex environments is
one of the most challenging problem in the machine
vision. Tracking algorithms are developed to faith-
fully determine the movement of image region in each
frame that matches with the given object. In general,
developing a robust tracker is a challenging problem
due to dynamic change in appearance, background,
scale, rapid illumination variation, and occlusion.
For the past two decades, many algorithms with
different frameworks have been developed for ob-
ject tracking. Among various algorithms, detect-
then-track, appearance-based and learning-based al-
gorithms are widely used in the literature. In detect-
then-track approaches (Stauffer and Brady, 2000),
objects are detected and tracked effectively in real-
time using the frame differencing or subtracting adap-
tively estimated background from the current frame.
Appearance-based approaches (Cootes et al., 2001)
create an object model from the first frame and incre-
mentally follow the model in the subsequent frames.
Learning-based algorithms use pattern recognition al-
gorithms to learn the target objects in order to search
them in an image sequence (Avidan, 2007). A com-
plete review on different algorithms in object tracking
can be found in (Yilmaz et al., 2006).
In this work the problem of object tracking in
video sequence is converted into a binary classifi-
cation problem and a discriminative model is devel-
oped to differentiate the object from the background.
Similarly, in (Collins et al., 2005) an adaptive on-
line feature selection mechanism is used to select best
tracker which can efficiently discriminate the object
and background in the current situation from the given
set of tracker. In (Nummiaro et al., 2003) an adaptive
target model for efficient mean-shift tracking is pre-
sented. The histogram based target model is updated
linearly when the confidence level exceeds threshold
value. Nevertheless, this adaptive tracker fails when
there is an abrupt change in the appearance or illu-
mination. In (Jepson et al., 2003), short-term and
long term image descriptors are constantly updated
and re-weighted using online-EM to handle abrupt
change in object appearance. The above mentioned
approaches require proper initialization of the object
410
BÄ
ˇ
Ek S., Suresh S., BrÃl’mond F. and Thonnat M.
FUSION OF MOTION SEGMENTATION WITH ONLINE ADAPTIVE NEURAL CLASSIFIER FOR ROBUST TRACKING.
DOI: 10.5220/0001769604100416
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-69-2
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
bounding box in the first frame and does not handle
change in scale. In (Williams et al., 2005) the use
of statistical learning algorithm for object localiza-
tion is extended. A displacement expert is build to
estimate displacement from the target region. A fully
probabilistic relevance vector machine (RVM) is used
to generate observations with Gaussian distributions
which can be fused over time. Recently, in (Avidan,
2007), the appearance of object and its background
are modeled using an ensemble of classifiers. Each
one of the classifiers is trained to identify object and
background classes. Then a strong classifier obtained
by Ada-boost is used to locate the object in the next
frame. All these approaches require proper initializa-
tion and are limited to single object.
In this paper, the information from motion seg-
mentation is fused with online adaptive neural clas-
sifier to handle aforementioned issues. The online
learning sequential classifier is used to differentiate
the object region from non-object region. The objects
present in the video sequence are detected by using
the motion segmentation information combined with
the object classification. Then, the neural classifier
is initialized to differentiate the object from its local
background. In following frames the motion segmen-
tation helps to avoid drifting problems due to similar
appearance in the local background region.
The outline of the rest of the paper is the follow-
ing. In Section 2 the used platform (SUP) and the
proposed fusion of motion and neural tracking algo-
rithm are presented. Section 3 illustrates experimen-
tal results and Section 4 contains some concluding re-
marks.
2 SUP PLATFORM
Scene Understanding Platform is developed at the re-
search group PULSAR at INRIA, Sophia Antipolis.
It is an environment for combining algorithms for
video analysis which allows to flexibly combine and
exchange various techniques at the different stages
of video understanding process. Furthermore, SUP
is oriented to help developers describing their own
scenarios and building systems capable of monitor-
ing behaviors, dedicated to specific applications. SUP
takes as an input video stream, a geometric descrip-
tion of the unoccupied scene, a geometric description
of models appearing on the scene and a set of behav-
iors of interest specified by experts of the application
domain. Afterwards, it is possible to process the men-
tioned data by combining different modules including
algorithms. In our approach the object classification
module performs the initialization of tracked objects.
Object classification (Zú
˜
niga et al., 2006) per-
forms the initialization for object tracker. Here, ob-
jects are modeled independently from the camera po-
sition and object orientation. A simple parallelepiped
model is used for 3D object modeling, which is es-
timated using set of 2D moving regions (obtained in
a segmentation phase). These moving regions (also
called blobs) are merged to improve the classification
performance by assembling 2D moving regions with
better 3D model probability. The merged blobs with
their associated class label are called mobiles. Each
mobile is enclosed by a 2D bounding box, which is
used for object initialization and also in adaptation
phase of the tracker.
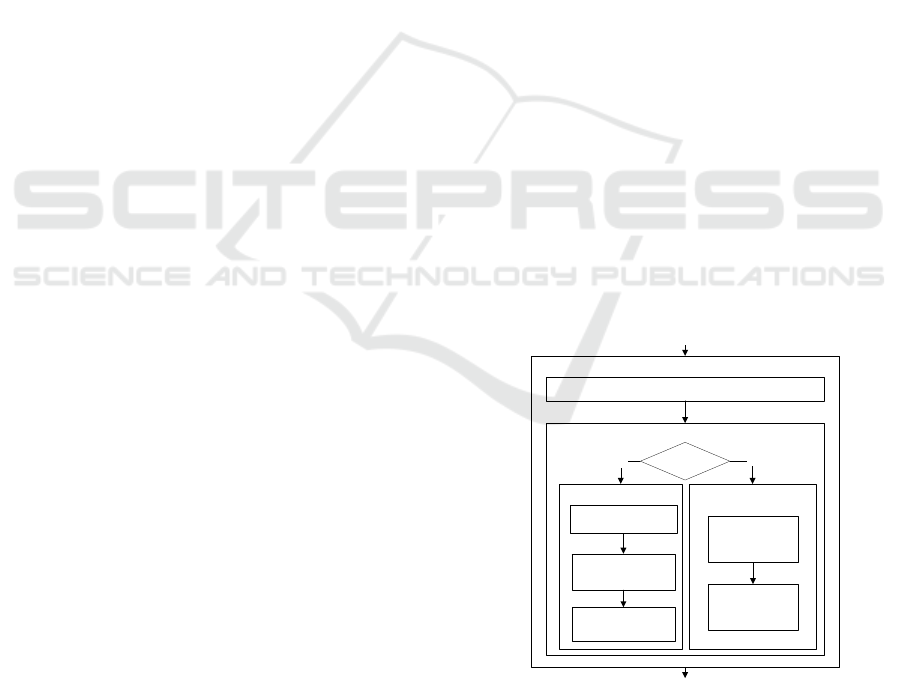
2.1 Neural Object Tracker
The neural tracker aims at distinguish foreground ob-
jects from the background. In Fig. 1 the general
model of the neural tracker is presented. First, mo-
biles generated using motion information are used for
initialization. If the 2D bounding box of a mobile re-
lates to an area where none target exists, a new target
is initialized. In this case the target goes through three
steps: feature extraction, object/background separa-
tion and neural network training. Otherwise, if a tar-
get exists in the corresponding area, the tracking al-
gorithm is applied. For each target the new location
is determined using the localization step. Then, in the
adaptation phase, the dimension of the target is cor-
rected and the neural network is adapted using fea-
tures computed in the new target region.
SUP
Object Classification
Video stream
Motion information
New Target?
Initialization
Yes
No
Tracking
Localization
Adaptation
Feature Extraction
Object/Background
Separation
Neural Network
Training
Neural Tracker
Tracked Objects
Figure 1: Model of the neural tracking system.
Target Initialization is based on the motion infor-
mation obtained from the object classification. This
information is given in a form of coordinates of 2D
FUSION OF MOTION SEGMENTATION WITH ONLINE ADAPTIVE NEURAL CLASSIFIER FOR ROBUST
TRACKING
411

bounding boxes of mobiles with labels assigned in the
classification phase. Features are extracted for each
2D bounding box together with its local background.
The label of the target is used to initialize some con-
stants in the neural network algorithm (e.g. maximal
number of neurons in the neural network or size of
extracted regions in the feature extraction step).
Feature Extraction returns vectors, which contain
values representing features from target region (e.g.
RGB values). The neural network can use different
types of features such as simple color features, re-
gion based features, local gradients or texture. The
feature vector is computed for each pixel in case of
small objects (max. 1000 pixels). Otherwise we ex-
tract region based features like Region based Color
Moments (RCM) to speed up the approach. In this
case, the target is separated into rectangular regions.
For each region the feature vector is calculated using
mean values of pixels belonging to the region. These
vectors are used for object/background separation.
Object/Background Separation is used for the
training step. Tracking an object will be efficient
if we can separate the object region from the back-
ground accurately. The problem of tracking is con-
verted into a binary classification problem and solved
using neural networks. The online learning neural
tracker presented in this paper is a generic approach,
which is trained to separate the object region from
the background. We represent the target as a 2D
bounding box. The features inside the target can be
labeled as ‘object class’ and features outside target
region can be labeled as ‘background class’. Some
of the features inside the target region will be simi-
lar to the background. Such features have to be la-
beled as ‘background class’ for better classification
performance. For this purpose, we use a feature-based
object-background separation technique. Here, the
probability density function of the feature in the tar-
get region and its local background is obtained to find
the log-likelihood ratio of the sample belonging to the
‘object class’. The log-likelihood ratio L
i
is obtained
as
L
i
= log
max{h
o
(i), ε}
max{h
b
(i), ε}
(1)
where h
o
(i) and h
b
(i) are the probabilities of ith sam-
ple belonging to the object and the background, re-
spectively; ε is a small non-zero value to avoid nu-
merical instability. The class label is determined us-
ing the threshold τ
o
on L
i
. Typical value of τ
o
is set at
0.65. More details can be found in (B ˛ak et al., 2008).
Online Neural Classifier proposed in this paper
adapts the temporal change in appearance of the ob-
ject/background model. The basic building block of
the neural classifier is the Radial Basic Function Net-
work (RBFN). The RBFN is trained to recognize the
object region and its local background by estimating
the posterior probability of the feature vector belong-
ing to the object or the background. The RBFN ar-
chitecture consists of an input layer, a hidden layer
and an output layer. The inter-connection weights
only exist between the hidden and the output layer.
Gaussians units are used in the hidden layer as activa-
tion functions because of their localization properties.
Generally, the output of the RBFN classifier with K
hidden neurons has the following form:
ˆy
i
= f (X
i
) =
K
∑
j=1
α
j
exp
−kX
i
− µ
j
k
2σ
2
j
!
(2)
where µ
j
and σ
j
is the center and width of the j
th
neuron, respectively; α
j
is the weight connection be-
tween the j
th
neuron and the output, α
j
∈ ℜ; X
i
is the
feature vector of i
th
sample.
RBFN classifier involves the allocation of new
Gaussian hidden neurons, pruning the neurons and
also adapting the neuron parameters. The RBFN be-
gins with no hidden neurons (i.e., the network out-
put is zero for the first sample). While the observa-
tion data are received sequentially, the network starts
growing and shrinking by using some of them to make
decision based on certain criterions. The input of the
neural network are vectors obtained in the feature ex-
traction phase. Risk sensitive hinge loss function pro-
posed in (Suresh et al., 2008a) is used to compute the
learning error. Risk loss function helps in estimating
the posterior probability accurately. Growing crite-
rion is based on the error value (e
i
) and a distance be-
tween the nearest neuron and the training sample. If
the distance between the new training sample and the
nearest neuron of the same class exceed a threshold
a new hidden neuron will be added to the RBF clas-
sifier. Its parameters are set as follows: α
K+1
= e
i
,
µ
K+1
= X
i
, and σ
K+1
= κkX
i
−µ
nr
k. Here, κ is a pos-
itive constant which controls the overlap between the
hidden neurons. The value of κ is 0.8 in our experi-
ments. When the new training sample does not satisfy
the criterion for adding a new hidden neuron, the net-
work parameters are adapted using a Decoupled Ex-
tended Kalman Filter (DEKF). More details on learn-
ing algorithm can be found in (Suresh et al., 2008b).
In order to maintain a compact network and remove
a non-performing neuron, a pruning strategy is incor-
porated in the algorithm. Pruning of neurons ensures
that the neurons that have been added in the past and
have not contributed significantly to the network per-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
412

formance are removed from the network. This strat-
egy consists in removing neurons which contributions
is less than a threshold for M consecutive observa-
tions. The parameter M depends on the number of
samples in each class.
Localization phase is needed to calculate a dis-
placement of the target. It is achieved by computing
the distance between weighted centers of the target in
current and previous frame. Let c
i
be the weighted
object center obtained from the corresponding prob-
ability map ˆp
i
in i
th
frame. Then, using the neu-
ral network and the location of the target from i
th
frame we calculate the posterior probability map ˆp
i+1
in (i + 1)
th
frame. Here we assume that there is an
overlap between the target region in the subsequent
frames. Otherwise, the tracker fails to detect the cor-
rect center of the object. It can happen considering
fast moving objects. In this case the tracker should
use the motion information to compare generated 2D
bounding boxes with already existing targets. Assum-
ing an overlap, the new center is estimated as
c
i+1
=
$
∑
j
I
i+1
j
ˆp
i+1
j
ˆp
i
j
∑
j
ˆp
i+1
j
ˆp
i
j
%
(3)
where I
i+1
is the location of the j
th
feature. Next,
the 2D bounding box is moved by the vector com-
puted using both centers. The probability map is up-
dated considering the new location of the target and
the procedure is repeated until the distance between
both centers (∆c) can be neglected. More details on
the localization can be found in (B ˛ak et al., 2008)
Adaptation is responsible for the correction of the
size of the object bounding box and the adaptation of
the neural network to handle changes in appearance.
This procedure is based on the probability map ob-
tained from the neural classifier and the motion infor-
mation generated by the object classification module.
Firstly, we use the probability map to find the cur-
rent object dimension. For this purpose, we define the
class label map based on the estimated posterior prob-
ability. Then, the morphological operations are ap-
plied to remove noises. After noise removal, the map
is used for size determination based on a calculation
of continuous regions in width and height dimension.
Secondly, the object classification generates mobiles
which are compared with existing ones. If a mobile
relates to an area where none target exists then a new
one is initialized. Otherwise, the mobile is used to
adapt the target located in this area. The information
coming from motion segmentation is fused with the
estimated posterior probability map generated by the
neural classifier. The pseudo code of the information
fusion at adaptation level is given in Listing 1.
Listing 1 : Pseudo code for information fusion.
Adaptation(frame
i
)
begin
if no mobile /* classification fails */
do not adapt the NN and the target size
else
[c
t
, s
t
]
i
- apply morphological operations
[c
m
, s
m
]
i
- mobile from the classification
compare [c
t
, s
t
]
i
with [c
t
, s
t
]
i−1
and
[c
m
, s
m
]
i
with [c
m
, s
m
]
i−1
if( ∆s
t
> 40% and ∆s
m
> 40%)
do not adapt the NN and the target size
else
/*fusion of the NN and motion segmentation*/
compare [c
t
, s
t
]
i
with [c
m
, s
m
]
i
if( ∆s
i
> 10% )
compare [c
t
, s
t
]
i
with the history of mobiles
if( min( ∆s ) > 20% )
[c
t
, s
t
]
i
:= [c
m
, s
m
]
i
update the history of mobiles
adapt the NN using [c
t
, s
t
]
i
[c
new
, s
new
]
i
- apply morphological operations
compare [c
new
, s
new
]
i
with [c
t
, s
t
]
i
if( ∆s > 10% )/* the NN fails */
retrain the NN
end.
Listing 2 : Occlusion events.
OcclusionEvent(Target A)
Constraint{A.density < 10%}
Alarm("Occlusion")
State_Assignment{A.state = OCCLUDED}
DynamicOcclusionEvent(Target A, Target B)
Constraint{Crossing.Area > 60% of A.Area}
Alarm("Dynamic Occlusion")
State_Assignment{
if(A.density < B.density)
A.state = DYNAMIC_OCCLUDED}
The algorithm starts by checking if there is a mo-
bile in the related target area. We do not adapt the
neural network and the target size in the case of ab-
sence of mobiles. If the mobile exists we try to fuse
mobile information with output of the neural classi-
fier. In order to achieve this we compare both infor-
mation to make decision about the true dimension of
the object. First, morphological operations are ap-
plied to estimate the current target size. Let us as-
sume that the center and the size at frame i are rep-
resented by [c
t
, s
t
]
i
as the result of morphological op-
erations and [c
m
, s
m
]
i
as the mobile. Next, both target
FUSION OF MOTION SEGMENTATION WITH ONLINE ADAPTIVE NEURAL CLASSIFIER FOR ROBUST
TRACKING
413

and mobile size are compared with target and mobile
size at previous frame, respectively. If the size change
(∆s) in both cases is greater that 40% we do not al-
low to adapt the target size and also the parameters of
the neural network are not modified. Here, we try to
avoid abrupt changes obtained from the object classi-
fication which happens in a case of shadows, crowds
or another disturbances coming from the motion in-
formation. Then, the fusion rules is used to decide
whether it is necessary to correct the dimension and
the localization of the target. We check the difference
between the target and the mobile size (∆s
i
) in cur-
rent frame. If it is greater than 10% we compare the
target size with the history of mobiles (max 5 previ-
ous mobiles). If the history suggest that the mobile
size is invariant then we accept the new size and the
new center. After establishing of the target dimen-
sion the neural network is trained using samples from
the target and its local background region. The new
probability map is computed and the new dimension
of the target is determined. If the difference between
new and previous size is greater than 10% we assume
that the neural network fails. All neurons are removed
and the network is retrained.
After the adaptation step, the tracker checks if
there are any occlusions in the scene. Occlusion
events are presented in Listing 2. We distinguish two
types of occlusion. First, the static occlusion means
that the moving target is occluded by static item. This
decision is made only if the density value of the prob-
ability map decreases more than 10%. However, the
dynamic occlusion is detected when the target crosses
another target and the common area is greater than
60% of the area belonging to one of them. We assume
that the first target is occluded if the density value is
less than the density of second target.
3 EXPERIMENTAL RESULTS
We have tested many challenging video sequences to
illustrate advantages and limitations of our tracker.
The online learning phase enhances the ability to
track under changing background and illumination
conditions, changing in appearance and scale and im-
proper initialization. First, the experiments were per-
formed on the data obtained from the Gerhome lab-
oratory which promotes research in the domain of
activity monitoring and assisted living (Zouba et al.,
2008). Next, we tested our approach on TREC Video
Retrieval Evaluation (organized by NIST, TRECVID
2008) data obtained from Gatwick Airport surveil-
lance system. Below we present two example se-
quences. More evaluations can be found in (B ˛ak et al.,
2008).
Gerhome Video Sequence in Fig. 2 is presented.
At first frame a target is initialized as a bounding box
with a label which is obtained from the object clas-
sification module. During initialization for each new
target the neural network is created and an identity
is assigned. Next, this neural network is trained us-
ing features computed from the target and the local
background region. At frame 67 we can observe im-
portant issues. The motion information for object ini-
tialization is not always correct which leads to track
noise (as ‘2-PERSON’) due to illumination change.
Nevertheless if in subsequent frames the target is not
confirmed by the motion information coming from
the object classification, the target is assumed to be
a noise and afterwards is removed. However a more
important issue is that the tracked person is split into
two targets (‘0-PERSON’ and ‘3-PERSON’), caused
also by noise coming from motion information. We
do not apply any merging algorithm for tracked tar-
gets because it is very difficult to decide whether few
targets in fact represent one real object or several dif-
ferent objects. The neural network is not also helpful
in that case because parts of a real object could have
a completely different appearance model which pre-
vents from merging such kind of targets. At frame 93
we can see ‘0-PERSON’ marked as occluded target
due to movement of object behind a cupboard door.
At frame 133 we show that the neural tracker is able
to capture true dimension of the object in following
frames.
We also tested our approach on a long-term
sequence. An elderly woman in her apartment
(real world scene with occlusions and illumination
changes) was tracked during 1 hour and 23 minutes
(50.000 frames). A woman left for short periods of
time the observed room (and came back) 7 times. The
tracker was confused only 22 times (id switched).
TRECVID Video Sequence in Fig. 3 is pre-
sented. During this complex sequence many objects
are crossing each other. It is shown that the neural
tracker has the ability to manage with dynamic and
static occlusions. The neural tracker is used to make
decision which targets are occluded. For each target
the probability map of the overlapping area is com-
puted and the most probable one is chosen. The most
probable target means the target which has the largest
density value of the probability map. During dynamic
occlusion localization stage does not use probability
map to localize target but its history which is based
on the target displacement. Also the adaptation pro-
cess is suspended. The history contains the informa-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
414

(a) Frame 1 (b) Frame 67 (c) Frame 93 (d) Frame 133
Figure 2: Tracking results from Gerhome laboratory. Person is split into two parts.
(a) Frame 1 (b) Frame 15 (c) Frame 52 (d) Frame 110
Figure 3: Tracking results for TREC Video Retrieval Evaluation data. Complex sequence.
tion about the velocity and the direction of the tar-
get motion represented by displacement vector. Using
that information our tracker is able to approximate lo-
cation of the occluded target. We resume using the
neural network only if we confirm separated objects
from the motion information. It is worthy noting that
an appearance information coming from the neural
network is not always enough to differentiate the ob-
ject from the background accurately. Consequently, it
leads us to fuse the neural classifier with the motion
information.
At first frame, we can observe that two persons
are grouped into single object (‘2-PERSON’ and ‘3-
PERSON’). It is impossible to separate them due to
close proximity and shadow. But, the effect of shadow
was removed in subsequent frames using the poste-
rior probability map from online learning tracker. We
can also observe that the object ‘4-PERSON’ lost at
frame 15 due to similarity with object ‘0-PERSON’
and occlusion with barrier. Later, the same object is
reinitialized as a new object. From the result, we can
observe that the proposed tracker is able to handle sig-
nificant occlusion with multiple object and track them
efficiently. The target ‘1-PERSON’ is crossing many
other targets and its identity remains unchanged.
4 CONCLUSIONS
We have presented an online learning neural tracker
to handle dynamic changes in object/background ap-
pearance, illumination and scale. The problem of
tracking is treated as a binary classification problem,
and online learning neural classifier is used to differ-
entiate the object and the background region. The
information from motion segmentation is fused with
this neural classifier for robust object tracking. The
results indicate that the tracker is robust under normal
illumination variation, appearance and scale changes.
Occlusions are also handled using the motion and the
probability map information. Furthermore, consid-
eration of different features like shape or silhouette
might be beneficial. Additional research can also be
carried out in order to handle separated parts of the
same object and improve the initialization step.
REFERENCES
Avidan, S. (2007). Ensemble tracking. IEEE Trans. Pattern
Anal. Machine Intell., 29(2):261–271.
B ˛ak, S., Suresh, S., Bremond, F., and Thonnat, M.
(2008). Fusion of motion segmentation and
learning based tracker for visual surveillance. In
Internal report: INRIA Sophia Antipolis, http://www-
sop.inria.fr/pulsar/personnel/Francois.Bremond/topicsText/
neuralProject.html, volume 1, pages 1–10.
Collins, R. T., Liu, Y., and Leordeanu, M. (2005). Online
selection of discriminative tracking features. IEEE
Trans. Pattern Anal. Machine Intell., 27(10):1631–
1643.
Cootes, T., Edwards, G., and Taylor, C. (2001). Active ap-
pearance models. IEEE Trans. Pattern Anal. Machine
Intell., 25(5):681–685.
Jepson, A. D., Fleet, D. J., and El-Maraghi, T. (2003).
Robust online appearance model for visual track-
ing. IEEE Trans. Pattern Anal. Machine Intell.,
25(10):1296–1311.
FUSION OF MOTION SEGMENTATION WITH ONLINE ADAPTIVE NEURAL CLASSIFIER FOR ROBUST
TRACKING
415

Nummiaro, K., Koller-Meier, E., and Van Gool, L. (2003).
An adaptive color-based particle filter. Image vision
computing, 21(1):99–110.
Stauffer, C. and Brady, J. (2000). Learning patterns of ac-
tivity using real-time tracking. IEEE Trans. Pattern
Anal. Machine Intell., 22(8):747–757.
Suresh, S., Sundararajan, N., and Saratchandran, P.
(2008a). Risk sensitive loss functions for sparse multi-
category classification problems. Information Sci-
ences, 178(12):2621–2638.
Suresh, S., Sundararajan, N., and Saratchandran, P. (2008b).
A sequential multi-category classifier using radial
basis function networks. Neurocomputing, 71(7-
9):1345–1358.
Williams, O., Blake, A., and Cipolla, R. (2005). Sparse
bayesian learning for efficient visual tracking. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 27(8):1292–1304.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object track-
ing: A survey. ACM Computing Surveys, 38(4):1–45.
Zouba, N., Boulay, B., Bre
´
mond, F., and Thonnat, M.
(2008). Monitoring activities of daily living (adls) of
elderly based on 3d key human postures. In Proc. of
International Cognitive Vision Workshop, pages xx–
xx, Greece.
Zú
˜
niga, M., Brémond, F., and M.Thonnat (2006). Fast
and reliable object classification in video based on
a 3d generic model. In Proceedings of the Interna-
tional Conference on Visual Information Engineering
(VIE2006), pages 433–440, Bangalore, India.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
416
