
COMPARISON OF RECONSTRUCTION AND TEXTURING OF
3D URBAN TERRAIN BY L
1
SPLINES,
CONVENTIONAL SPLINES AND ALPHA SHAPES
Dimitri Bulatov
Scene Analysis Division, Research Institute for Optronics and Pattern Recognition (FGAN-FOM)
Gutleuthausstraße 1, 76275 Ettlingen, Germany
John E. Lavery
Mathematics Division, Army Research Office, Army Research Laboratory, Research Triangle Park, NC 27709, U.S.A.
Scene Analysis Division, Research Institute for Optronics and Pattern Recognition (FGAN-FOM)
Gutleuthausstraße 1, 76275 Ettlingen, Germany
Keywords: 3D, Alpha shapes, Cubic spline, Irregular data, L
1
Spline, Noisy, Nonparametric, Optical, Parametric,
Reconstruction, Texturing, Urban terrain.
Abstract: We compare computational results for three procedures for reconstruction and texturing of 3D urban terrain.
One procedure is based on recently developed “L
1
splines”, another on conventional splines and a third on
“α-shapes”. Computational results generated from optical images of a model house and of the Gottesaue
Palace in Karlsruhe, Germany are presented. These comparisons indicate that the L
1
-spline-based procedure
produces textured reconstructions that are superior to those produced by the conventional-spline-based pro-
cedure and the α-shapes-based procedure.
1 INTRODUCTION
Reconstruction and texturing of urban terrain based
on data obtained from inexpensive cameras on small
unmanned aerial vehicles (UAVs) are of importance
for urban planning, civilian emergency operations
and defense. Due to unstable flight paths and to the
lack of consistent availability of external references
such as GPS, such data are often corrupted by large
amounts of noise and by bias. Geometric point
clouds created from optical images typically consist
of data with highly irregular spacing—with sparse
regions resulting from poorly textured areas right
next to dense regions. The human eye can often
discern urban structures under these conditions,
although automatic procedures for doing so are few
and far between.
Urban terrain is particularly challenging to
model because it has “ubiquitous” discontinuities as
well as planar regions and regions of slow and rapid
smooth change. In addition, the data is inherently 3D
rather than 2.5D, since there are often vertical walls
and overhanging structures, such as edges of roofs,
sills of windows and branches of trees in the images.
Splines of many varieties, including tensor-product,
polynomial (B-splines), thin-plate, rational and net-
work splines (Bos and Holland, 1996; Brovelli and
Cannata, 2004; Chui, 1988; de Boor, 1993; Eck and
Hoppe, 1996; Farin, 1995, 1997; Lee et al., 1997;
Piegl and Tiller, 1995; Powell, 1997; Späth, 1995)
perform well on many types of smooth data but pro-
duce nonphysical oscillation near the gradient dis-
continuities in urban terrain and near boundaries
between regions with sparse and dense data. Trian-
gulated Irregular Networks, or “TINs” (Thurston,
2003), have been used to model 2.5D terrain with
considerable success. Both TINs and the related 3D
approach, often called Triangular Mesh Surfaces
(TMSs), can model corners and planar regions accu-
rately and with high compression but not regions of
smooth change. Also, these procedures are sensitive
to noise and outliers in the data. One often used
TMS procedure is alpha shapes or, as it is also
403
Bulatov D. and Lavery J. (2009).
COMPARISON OF RECONSTRUCTION AND TEXTURING OF 3D URBAN TERRAIN BY L1 SPLINES, CONVENTIONAL SPLINES AND ALPHA
SHAPES .
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 403-409
DOI: 10.5220/0001746504030409
Copyright
c
SciTePress

called, α-shapes (Edelsbrunner and Mücke, 1994),
will be considered in Sec. 3. Further alternatives for
terrain modeling such as kriging (Cressie, 1993) and
wavelets (Chui et al., 1994) have some advantages
for various types of terrain but are not sufficiently
accurate and/or efficient for urban terrain.
Recently, a spline procedure hitherto unexplored
in the context of urban terrain modeling, one based
on a new class of splines called L
1
splines, was
proposed (Bulatov and Lavery, 2009). Computati-
onal results for L
1
splines in geometric modeling
(Gilsinn and Lavery, 2002; Lavery, 2001, 2004) and
in the context of reconstruction and texturing of ur-
ban terrain (Bulatov and Lavery, 2009) indicate
excellent performance. However, direct comparison
of the L
1
spline reconstruction and texturing
procedure with alternative procedures has not yet
been carried out. This paper fills this void by pro-
viding comparison of the L
1
-spline-based procedure
with procedures based on conventional polynomial
splines and on α-shapes.
Comparing different methods among themselves
is conceptually best carried out in the context of
comparison of all of the methods with ground truth.
In the case of modeling textured objects, however, a
metric that meaningfully measures changes in geo-
metry, texture and color information is unknown.
Geometric surfaces can be compared by means of
metrics such as the standard mean error metric (rms
metric), an L
p
metric or the Hausdorff metric. If
these metrics are to be applied to texture and color in
addition to the geometry, they have to be formulated
in some artificial space involving geometry, bright-
ness and RGB. The mean error metric in such a spa-
ce can easily be shown not to correspond to what hu-
man beings expect. Simple, commonplace examples
can be constructed to show that the mean error met-
ric can be small when human beings judge the error
to be large and can be huge when human beings
judge the error to be small. It is well known that,
even for the “simple” issue of measuring geometric
error (ignoring texture and color), the mean error
metric and the minimax error metric in the vertical
direction are very poor measures of error. If the error
is measured not in the vertical direction but rather in
the direction orthogonal to the surface, the
improvement (that is, how well the quantitative
metric expresses what human viewers would judge)
is not large. The issue of metrics for quantitative
comparison is a huge and hitherto virtually
unexplored issue (Lavery, 2006). For this reason, we
do not attempt to quantify the comparisons presented
in this article but allow the reader to make
judgments for her/himself.
In Sec. 2, we describe the five steps of the proce-
dure introduced in (Bulatov and Lavery, 2009) and
define the nonparametric and parametric L
1
splines
that are at the foundation of this procedure. Com-
parisons of this procedure with procedures based on
conventional splines and on α-shapes are presented
in Sec. 3. Finally, Sec. 4 provides concluding re-
marks, including information about future directions.
2 L
1
-SPLINE-BASED
PROCEDURE FOR
RECONSTRUCTION
AND TEXTURING
There are five steps in the L
1
-spline-based procedure
that we investigate here, namely,
• Step 1: Creation of the point cloud from the
optical images
• Step 2: Generation of a nonparametric 2.5D
surface from the point cloud
• Step 3 (iterated): Creation of a parametrized da-
ta set using the latest 2.5D or 3D surface
• Step 4 (iterated): Generation of a parametric 3D
surface
• Step 5: Meshing and texturing of the 3D surface
These steps are outlined in the remainder of this
section. More detail about these steps can be found
in (Bulatov and Lavery, 2009).
Step 1 is carried out by recently developed struc-
ture-from-motion methods (Nistér, 2001, Martinec,
2006). In the implementation that we use (Bulatov,
2008), characteristic points are found in periodic in-
tervals and tracked from frame to frame by KLT
tracking (Lucas and Kanade, 1981). The reconst-
ruction takes place in a projective coordinate system.
The transformation into a Euclidean coordinate
system is done by self-calibration; see (Hartley and
Zisserman, 2000) for further information. The
results of this step are a point cloud
{}
1
M
m
m
X
=
==x
()
{
}
1
,,
M
mmm
m
xyz
=
with all
m
x
and
m
y in an xy domain
D and a set of camera matrices. The set of camera
matrices is reduced by taking approximately every
tenth camera matrix and corresponding image, items
that will later be needed for texturing. These images
will be referred to as “reference images”.
In Step 2, the nonparametric 2.5D L
1
spline
(smoothing spline)
(,)zzxy
=
is created from X as
the function z that minimizes over a set of C
1
-
smooth piecewise cubic functions z on D. Here, γ is
a balance parameter that trades off how closely the
data points are fitted vs. the tendency of the surface
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
404

1
222
22
(,)
(1 ) 2 d d
() ()
M
mmm m
m
D
nodes
wzx y z
zzz
x
y
xxyy
zz
node node
xy
γ
γ
ε
=
−
⎡⎤
∂∂∂
+− + +
⎢⎥
∂∂∂∂
⎣⎦
⎡⎤
∂∂
++
⎢⎥
∂∂
⎣⎦
∑
∫∫
∑
(1)
to be close to planar segments,
m
w is a weight and ε
is a regularization parameter.
Let
(
)
ˆˆ
ˆ
,,
mmm
x
yz denote the point on the L
1
spli-
ne (,)zxy closest to
(
)
,,
mmm
x
yz and let
ˆ
mm
ux
=
and
ˆ
mm
vy= . The parametrized data set of Step 3 is
{}
(,,),(,, ),(,,)
1
M
mmm mm m mmm
m
uvx uv y uvz
=
. The para-
metric 3D spline
(
)
(,) (,), (,), (,) uv xuv yuv zuv=x
of Step 4 minimizes a functional that consists of
functional (1) with x and y replaced by u and v plus
twelve additional expressions in which z (with or
without subscript) is replaced by x, y, x + y, x – y, x
+ z, x – z, y + z, y – z, x + y + z, x + y – z, x – y + z
and x – y – z. Steps 3 and 4 are now repeated twice.
On each iteration, a new parametrization is determi-
ned by finding, for each data point
,
m
x
the point
ˆ
m
x
on the 3D L
1
spline surface (,)uvx that lies closest
to
.
m
x
Defining new independent variables u, v as
ˆ
mm
ux= and
ˆ
,
mm
vy= the new parametrized data
set is
{}
(,,),(,, ),(,,) .
1
M
mmm mm m mmm
m
uvx uv y uvz
=
To create a triangular mesh for (,)uvx , we use
planar triangles in xyz space that correspond to tri-
angles in the parametric uv domain D. We subdivide
D into equally spaced rectangular cells R in u and v
and consider for every rectangle R the set
R
x
=
{
}
ˆ
(,),(,)
mm mm
uv uv R∈x
of points projected ortho-
gonally onto the surface. The spatial center of R is a
multipoint that is assumed to be observed in every
reference image that observes any of the points in
R
x
. We use Delaunay triangulation of multipoints,
which allow reducing the number of triangles to
around 0.05M, where M is the number of data
points. As an optional step, we refine the triangula-
tion using edge-flipping algorithms (Quak and Schu-
maker, 1991) in order to make the triangle edges
correspond to the changes of the normals of the
multipoints.
In order to texture a triangle T, we first compute
the intersection of the set of reference images for all
three vertex-multipoints. If this intersection is non-
empty, any reference image of the set can be used to
texture T. If the intersection is empty, we proceed as
follows to choose the image for texturing: Let
g be
the center of gravity of T, P be the camera matrix
corresponding to the camera located at
t and
,TP
x
be the vertices T projected by P into the correspon-
ding image I. We also define
y
to be the points in
space visible in I, the projections in I of which are
near the projection of
g
in I. The images for which
either the angle β between the normal of T and the
vector
tg or the minimal distance of
,TP
x
from the
image border or the difference between
||tg and ||ty
exceeds a given threshold are rejected. From the rest
of the images, we take the one with the smallest
value of
||t
g
(1 – cos β). The triangles for which all
images were rejected are textured by a constant,
neutral color.
3 COMPARISON OF
L
1
-SPLINE-BASED
PROCEDURE WITH
OTHER PROCEDURES
In this section, we compare computational results for
the L
1
-spline-based procedure of Sec. 2 with compu-
tational results for procedures based on conventional
splines and α-shapes.
For the computational experiments, we chose all
parameters and items as in (Bulatov and Lavery,
2009). The computational grid was an equally spa-
ced grid with 30 cells in each horizontal direction.
The L
1
splines and conventional splines were con-
structed using Sibson elements (Lavery, 2001). The
weights w
m
were 1 divided by the number of points
in each of the four triangles in a rectangular Sibson
element. The balance parameter γ was 0.7 for the
nonparametric spline and the first parametric spline
and 0.8 for the second and third parametric spline.
For further details, see (Bulatov and Lavery, 2009).
The procedure based on conventional splines is
the same as that stated in Sec. 2 except that the
absolute values in the minimization principles are
replaced by squares and w
m
, γ, 1 – γ and ε are also
squared. Comparison of the L
1
-spline-based proce-
dure with a procedure based on conventional splines
is of interest because conventional splines are com-
monly used in geometric modeling and because all
of the differences in the results can be directly attri-
buted to the differences in the properties of L
1
and
conventional splines.
COMPARISON OF RECONSTRUCTION AND TEXTURING OF 3D URBAN TERRAIN BY L1 SPLINES,
CONVENTIONAL SPLINES AND ALPHA SHAPES
405

Comparison with the procedure based on α-sha-
pes is also valuable because α-shapes are commonly
used for modeling irregular 3D objects. In α-shapes,
given a point set X, a triangle T with vertices in X is
added to the list of triangles if and only if there is no
point of X in the open ball of radius α through the
vertices of T. Since α-shapes are subsets of
Delaunay triangulations and the number of possible
α-shapes is finite, the process of computing α-shapes
is fast (Edelsbrunner and Mücke, 1994). The proce-
dure based on α-shapes is the same as that stated in
Sec. 2 except that Steps 2–4 and the triangulation
portion of Step 5 are replaced by triangulation by α-
shapes. The values of α for which the best results
were obtained are (0.5-2.0)·10
4
σ, where σ is the
standard deviation of the dataset coordinates.
In Figure 1 and Figure 2, we present optical
images of a model house and of the Gottesaue Pa-
lace in Karlsruhe, Germany. The data set House was
reconstructed with 83 camera positions and some
10000 3D points. Bundle adjustment was run after
Euclidean reconstruction. The data set Gottesaue
was reconstructed with 339 camera positions and
some 40000 points.
Figure 3 and Figure 4 show the point clouds that
result from Step 1 of the procedure described in Sec.
2 above together with some of the camera positions.
Note the abruptly changing nature of the point cloud,
with adjacent sparse and dense regions. It is
particularly challenging to reconstruct the sparse
regions. In Figure 5 and Figure 6, we present the
scenes reconstructed and textured by the L
1
-spline-
based procedure of Sec. 2. Texturing was performed
using 594 and 1342 multipoints and 10 and 29
reference cameras for House and Gottesaue, res-
pectively. Note the sharp illumination changes in the
transition from the walls to the ground in the
colormap for Figure 6. In Figure 7 and Figure 8, we
show the triangular meshes and textured views of
buildings reconstructed by the conventional-spline-
based procedure described at the beginning of the
present section. Finally, in Figure 9 and Figure 10,
we present, for two characteristic values of α, the
meshes and final results for the buildings reconstruc-
ted and textured by the α-shapes procedure. The
computational results make clear the advantages of
the L
1
-spline-based procedure vs. the alternative pro-
cedures based on conventional splines and α-shapes.
Note by comparing Figure 6 and Figure 8 the nume-
rous extraneous, nonphysical peaks (oscillation) that
plague the conventional spline and the completeness
with which the L
1
spline eliminates these non-
physical peaks while retaining representation of
elevated physical objects such as the house beside
the palace on the left of Figure 2. Note also by
comparing Figure 6 with Figure 10 the inability of
α-shapes to produce a meaningful surface without
nonphysical holes when the data are noisy and
irregularly spaced and the ability of the L
1
spline to
produce an excellent, hole-free surface under the
same circumstances.
In the computational experiments for the sequen-
ce Gottesaue, the L
1
-spline-based procedure took
around 2 hours of computing time while the conven-
tional-spline-based and α-shapes-based procedures
took respectively about 1.5 and 0.5 minutes of com-
puting time. However, the quality of the reconstruct-
ed and textured scenes is inversely correlated to the
computing time. Even though the α-shapes-based
procedure performs rather well for the almost noise-
free data set House (Figure 9), it fails completely
when processing the noisy data set Gottesaue
(Figure 10) where no bundle adjustment took place.
The nonphysical oscillations near the gradient dis-
continuities and data outliers are quite apparent in
the results produced using conventional splines and
render these results difficult to accept.
Figure 1: Optical images from the sequence House.
Figure 2: Optical images from the sequence Gottesaue.
Figure 3: Point cloud for the sequence House together
with the camera trajectory.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
406
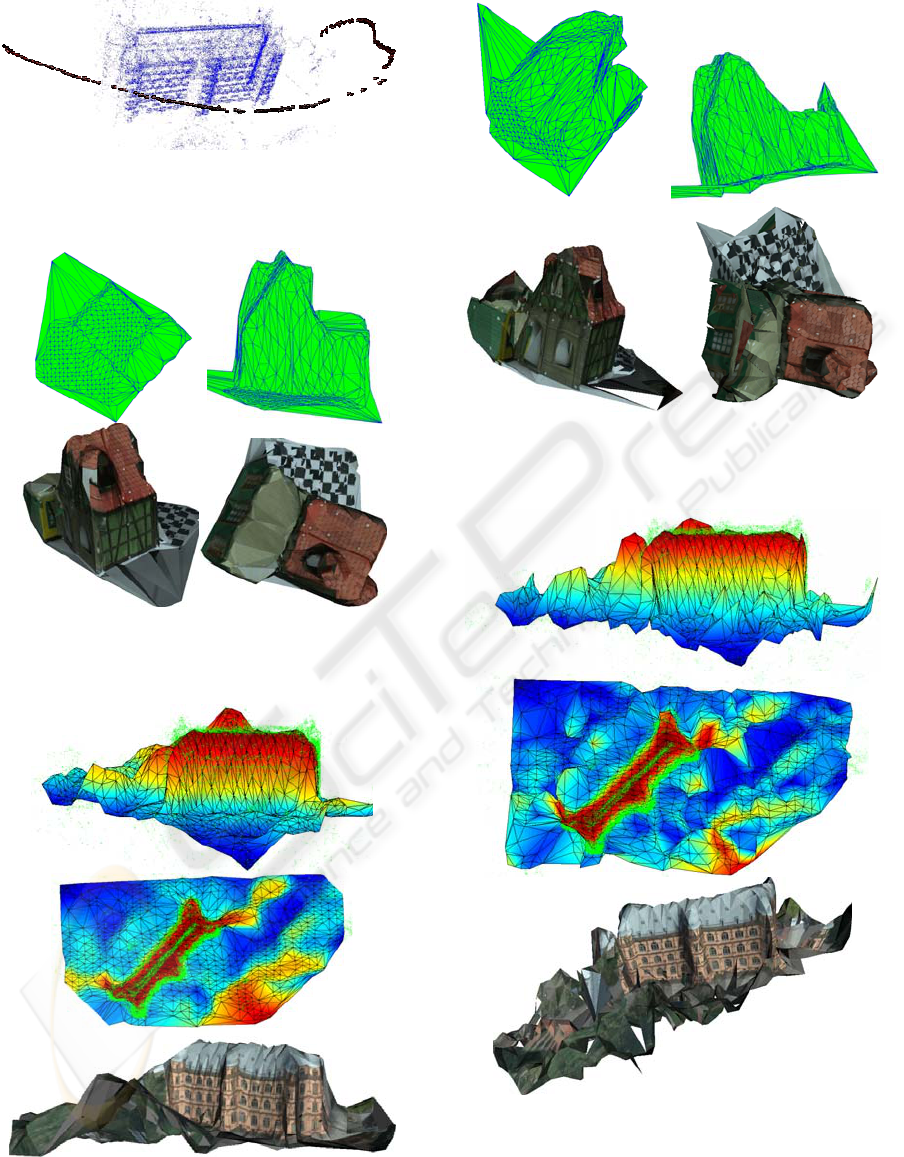
Figure 4: Point cloud for the sequence Gottesaue together
with a part of camera trajectory (placed artificially closer
to the point cloud).
Figure 5: Two views of the triangular mesh and two views
of the textured reconstruction produced from the sequence
House by the L
1
-spline-based procedure.
Figure 6: Two colormap views of the mesh and view of
the textured reconstruction produced from the sequence
Gottesaue by the L
1
-spline-based procedure. The original
point cloud is indicated by green points.
Figure 7: Two views of the triangular mesh and two views
of the textured reconstruction from the sequence House
produced by the conventional-spline-based procedure.
Figure 8: Two colormap views of the mesh and view of
the textured reconstruction produced from the sequence
Gottesaue by the conventional-spline-based procedure.
The original point cloud is indicated by green points.
COMPARISON OF RECONSTRUCTION AND TEXTURING OF 3D URBAN TERRAIN BY L1 SPLINES,
CONVENTIONAL SPLINES AND ALPHA SHAPES
407

Figure 9: Two views of the mesh and of the textured re-
construction produced from the sequence House by the α-
shapes procedure. Left α = 1.0·10
4
σ, right α = 2.0·10
4
σ.
Figure 10: Views of the mesh and of the textured
reconstruction produced from the sequence Gottesaue by
the α-shapes-based procedure. α = 0.5·10
4
σ above and α =
2.0·10
4
σ below.
The high computing time of the L
1
-spline-based
procedure is an artifact of its current implementati-
on, which was designed to prove a principle rather
than to optimize computing time. The computing ti-
me can be reduced by 4 to 6 orders of magnitude by
using L
1
splines calculated by domain decomposi-
tion (Lin et al., 2006) rather than global splines,
improved gridding and improved software structure,
which will make the L
1
-spline-based procedure real-
time or nearly so. The enhanced accuracy that the
L
1
-spline-based procedure produces justifies expen-
ding the effort to make these improvements in the L
1
spline algorithm and software.
4 CONCLUSIONS AND FUTURE
WORK
The comparisons presented in this paper indicate
that the L
1
-spline-based procedure is an excellent
path to improving reconstruction and texturing of
urban terrain and is a significant advance over the
previous state of the art. This procedure is able to
handle abrupt changes in the density of the point clo-
ud and is able to produce excellent reconstructions
even in regions with sparse data. The comparisons
show the importance of using L
1
splines rather than
conventional splines and α-shapes for processing of
3D urban scenes.
Future work on terrain modeling will include im-
proved implementation of the L
1
-spline-based proce-
dure. In addition to improving the software structure
in general, we will parallelize the algorithm by
calculating multiple local L
1
splines instead of one
global spline (“domain decomposition”) and patch
together the global L
1
spline from these local splines.
This work will be an extension of work in (Lin et al.,
2006). We will also implement adaptive rectangular
and triangular grids that will assign data points to L
1
spline computational cells in an even manner, that is,
so that there are roughly equal numbers of data
points per cell throughout the domain. (At present, a
few cells contain the bulk of the data points and
many cells contain few or no data points, a situation
that arises from the unavoidably irregular nature of
the point cloud.) These changes will not merely
reduce the computing time by orders of magnitude
but will also allow further enhancement of the
accuracy of the textured reconstruction. With respect
to performance evaluation, we will carry out further
experiments for quantitative and qualitative eva-
luation of continuative modifications of the methods
described in this paper as well as other alternatives
for terrain modeling.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
408

REFERENCES
Bos, L. P., and Holland, D., 1996. Network splines,
Results Math. 30, 228–258.
Brovelli, M. A., and Cannata, M., 2004. Digital terrain
model reconstruction in urban areas from airborne
laser scanning data: the method and an example for
Pavia (northern Italy), Computers & Geosciences
30, 325–331.
Bulatov, D., 2008. Towards Euclidean reconstruction from
video sequences, Proc. VISAPP 2, 476–483.
Bulatov, D., and Lavery, J.E., 2009. Reconstruction and
texturing of 3D urban terrain from noisy optical data
using L
1
splines, to appear in Photogrammetric
Engineering and Remote Sensing.
Chui, C. K., 1988. Multivariate splines, Society for Indus-
trial and Applied Mathematics, Philadelphia.
Chui, C.K., Montefusco, L., and Puccio, L., (eds.), 1994,
Wavelets: Theory, algorithms and applications,
Academic Press.
Cressie, N. A., 1993. Statistics for spatial data, Wiley,
New York.
de Boor, C., 1993. Multivariate piecewise polynomials,
Acta Numerica 2, 65–109.
Edelsbrunner, D. and Mucke, E.P., 1994. Three-dimen-
sional α-shapes, ACM Trans. Graphics 13, 43–72.
Eck, M., and Hoppe, H., 1996. Automatic reconstruction
of B-spline surfaces of arbitrary topological type,
Proc. 23rd Annual Conf. Computer Graphics and
Interactive Techniques, 325–334.
Farin, G., 1995. NURB curves and surfaces, A.K. Peters,
Wellesley, MA.
Farin, G., 1997, Curves and surfaces for computer-aided
geometric design: A practical guide, 4th ed.,
Academic Press, San Diego.
Gilsinn, D. E., and Lavery, J. E., 2002. Shape-preserving,
multiscale fitting of bivariate data by cubic L
1
smoothing splines. In Approximation theory X:
Wavelets, splines, and applications (C.K. Chui, L.L.
Schumaker and J. Stöckler, editors), Vanderbilt
University Press, Nashville, Tennessee, 283–293.
Hartley, R. and Zisserman, A., 2000. Multi-view geometry
in computer vision, Cambridge University Press.
Lavery, J. E., 2001. Shape-preserving, multiscale inter-
polation by bi- and multivariate cubic L
1
splines,
Comput. Aided Geom. Design, 18, 321–343.
Lavery, J. E., 2004. The state of the art in shapepreserving,
multiscale modeling by L
1
splines, in M.L. Lucian and
M. Neamtu (Eds.), Proc. SIAM Conf. Geom. Design
Computing, Nashboro Press, Brentwood, TN, 2004,
365─376.
Lavery, J. E., 2006. Human-goal-based metrics for models
of urban and natural terrain and for approximation
theory,” Proc. 25th Army Science Conf. (November
2006), Department of the Army, Washington, DC
(2006), PO-01.
Lee, S., Wolberg, G., and Shin, S.Y., 1997. Scattered data
interpolation with multilevel B-splines, IEEE Trans.
Visual. Computer Graphics 3, 228–244.
Lin, Y.-M., Zhang, W., Wang, Y. Fang, S.-C., and Lavery,
J.E., 2006. Computationally efficient models of urban
and natural terrain by non-iterative domain
decomposition with L
1
smoothing splines, Proc. 25th
Army Science Conf. (November 2006), Department of
the Army, Washington, DC, PP-08.
Lucas B. and Kanade T., 1981. An iterative image re-
gistration technique with an application to stereo
vision. In Proceedings of 7th International Joint
Conference on Artificial Intelligence (IJCAI), 674-
679.
Martinec, D., Pajdla, T., Kostková, J., and Šara, R., 2006.
3D reconstruction by gluing pair-wise Euclidean
reconstructions, or “How to achieve a good
reconstruction from bad images”. Proc. 3D Data
Processing, Visualization and Transmission Conf.
(3DPVT), University of North Carolina, Chapel Hill,
USA.
Nistér, D., 2001. Automatic dense reconstruction from
uncalibrated video sequences, PhD Thesis, Royal
Institute of Technology KTH, Stockholm, Sweden.
Piegl, L. A., and Tiller, W., 1995. The book of NURBS,
Springer-Verlag, New York.
Powell, M. J. D., 1997. A new iterative algorithm for thin
plate spline interpolation in two dimensions, Ann.
Numer. Math. 4, 519–527.
Quak, E. and Schumaker, L. L., 1991. Least Squares
Fitting by Linear Splines on Data-Dependent
Triangulations, in Curves and Surfaces. P.J. Laurent.
A. LeMehaute. and L.L. Schumaker. eds., Academic
Press. New York, 387-390.
Späth, H., 1995. Two dimensional spline interpolation
algorithms, A.K. Peters, Wellesley, MA.
Thurston, J., 2003. Looking back and ahead: The triangu-
lated irregular network (TIN), GEOInformatics 6, 32–
35.
COMPARISON OF RECONSTRUCTION AND TEXTURING OF 3D URBAN TERRAIN BY L1 SPLINES,
CONVENTIONAL SPLINES AND ALPHA SHAPES
409
