
FACE DETECTION USING DISCRETE GABOR JETS
AND COLOR INFORMATION
Ulrich Hoffmann
1
, Jacek Naruniec
2
, Ashkan Yazdani
1
and Touradj Ebrahimi
1
1
Multimedia Signal Processing Group, Ecole Polytechnique F´ed´erale de Lausanne (EPFL)
CH-1015, Lausanne, Switzerland
2
Faculty of Electronics and Information Technology,Warsaw University of Technology, 00-665 Warszawa, Poland
Keywords:
Face Detection, Colored Image Patch Model, Discrete Gabor Jets, Linear Discriminant Analysis.
Abstract:
Face detection allows to recognize and detect human faces and provides information about their location
in a given image. Many applications such as biometrics, face recognition, and video surveillance employ
face detection as one of their main modules. Therefore, improvement in the performance of existing face
detection systems and new achievements in this field of research are of significant importance. In this paper a
hierarchical classification approach for face detection is presented. In the first step, discrete Gabor jets (DGJ)
are used for extracting features related to the brightness information of images and a preliminary classification
is made. Afterwards, a skin detection algorithm, based on modeling of colored image patches, is employed
as a post-processing of the results of DGJ-based classification. It is shown that the use of color efficiently
reduces the number of false positives while maintaining a high true positive rate. Finally, a comparison is
made with the OpenCV implementation of the Viola and Jones face detector and it is concluded that higher
correct classification rates can be attained using the proposed face detector.
1 INTRODUCTION
The goal of face detection is to automatically find
faces in digital images. Given the pixels of an input
image, a face detection algorithm should return the
number of faces in that image and their coordinates.
The motivation for studying such algorithms is that
face detection is an important module in many appli-
cations involving digital images or video. One exam-
ple for an application area where face detection plays
an important role is biometric authentication based on
face recognition. Other examples of applications in-
volving face detection are automatic lip reading, fa-
cial expression recognition, advanced teleconferenc-
ing, video surveillance, and automatic adjustment of
exposure and focus in modern digital cameras.
Given the many possible applications, it is no
wonder that many different methods already exist for
face detection (see (Yang et al., 2001) for a survey).
One of the most well-known methods for detecting
upright frontal faces is based on a cascade of classi-
fiers trained using Adaboost and features resembling
Haar-wavelet bases (Viola and Jones, 2001). Other
well-known methods are the neural network based
method presented in (Rowley et al., 1998) and the
method presented in (Sung and Poggio, 1998). A uni-
fying feature of the methods described above and of
many other current approaches is that they are based
solely on features computed from the brightness of
pixels. This means faces are detected by analyzing
brightness patterns in rectangular image patches.
An alternative to using only brightness patterns is
to employ also features related to the color of pix-
els. The rationale underlying such an approach is that
many objects can be distinguished from other objects
based on their color. For face detection skin color
is an important cue, indicating that an image patch
might contain a face. The main advantages of using
color information for object detection tasks are that it
is robust against rotations, changes in scale, and par-
tial occlusions.
An early example for a face detection system us-
ing skin color is the system described in (Yang and
Ahuja, 1998). In this system skin pixels are detected
with a probabilistic model and skin regions are seg-
mented with a multiscale segmentation. Skin regions
having an elliptical shape and other facial characteris-
tics are then classified as faces. A similar method was
presented in (Hsu et al., 2002). In this work, first illu-
mination compensation is performed, then color fea-
76
Hoffmann U., Naruniec J., Yazdani A. and Ebrahimi T. (2008).
FACE DETECTION USING DISCRETE GABOR JETS AND COLOR INFORMATION.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 76-83
DOI: 10.5220/0001936400760083
Copyright
c
SciTePress

tures are used to detect skin regions, eyes, and mouth,
and finally eye-mouth triangles are computed to de-
tect face candidates. Different from the work pre-
sented in (Yang and Ahuja, 1998; Hsu et al., 2002),
the method in (Feraud et al., 2001), uses color in-
formation for prefiltering images. This means re-
gions without skin color are rejected before further
processing of an image takes place. In the algo-
rithm described in (Huang et al., 2004), color is in-
tegrated in the face detection process by transforming
images into YCrCb space, extracting wavelet features
from each color channel, and finally by combining the
wavelet features with the help of Bayesian classifiers
and Adaboost.
In this work we describe a method in which the
output of a face detector using brightness patterns
is post-processed with the help of a skin detection
method. We show that skin detection allows to re-
move many false positive detections, while maintain-
ing the true positives. A major advantage of the ap-
proach presented here is that it employs only a small
number of simple operations and thus can process im-
ages at a relatively high frame-rate. A further advan-
tage is that - unlike many other methods - our algo-
rithm returns the position of fiducial points, such as
for example eye corners or mouth corners. This fa-
cilitates tasks such as face recognition or multimodal
speech recognition using lip reading. Moreover, we
show that the classification accuracy of our detector
is competitive with the OpenCV implementation of
the detector presented in (Viola and Jones, 2001).
The outline of the rest of this paper is as fol-
lows. In section 2 we describe face detection based
on discrete Gabor jets (DGJ). Then, in section 3
we describe how color information can be used in a
probabilistic model for face detection. In section 4
the method for combining results from the DGJ and
color-based methods is explained. Finally, in sec-
tion 5 results are presented and discussed.
2 FACE DETECTION USING
DISCRETE GABOR JETS
The main idea underlyingDGJ-based face detection is
to first detect fiducial points such as eye corners and
mouth corners and then to detect faces by verifying
the relative positions of fiducial points with a refer-
ence graph. An overview of the different steps in the
DGJ face detection process is given in Fig. 1.
First, edge detection is performed using a Canny
edge detector with the Sobel operator. The goal of
performing edge detection is to reduce the number of
pixels that have to be analyzed and to focus on inter-
Figure 1: Face detection scheme: a) edge detection, b)
LDA for discrete Gabor jets, c) facial features matching,
d) merging facial features (separately, once for every scale),
e) computing eye centers.
Figure 2: Rings of small squares as neighborhoods of anal-
ysis.
esting non-uniform regions in the input image. After
edge detection, features are extracted from the neigh-
borhood of each edge pixel using rings of small rect-
angles as shown in Fig. 2. More precisely, a Fourier
analysis is performed on single rings and on the con-
trast between adjacent rings. The feature vectors are
then fed into a modified linear discriminant analysis
(LDA) classifier, which allows to assign each edge
pixel to one of the following seven classes: left or
right eye corner, left or right nose corner, left or right
mouth corner, and non-face fiducial point. The fidu-
cial points are then combined to form face candidates
using a reference graph. Finally, nearby face candi-
dates are merged to avoid multiple detections of sin-
gle faces.
The methods for feature extraction, classification,
and reference graph matching are described in more
detail in the following.
2.1 Feature Extraction I: Discrete
Gabor Jets
The Gabor filter (Gabor, 1946) in the spatial image
domain is a Gaussian modulated 2D sine wave grating
FACE DETECTION USING DISCRETE GABOR JETS AND COLOR INFORMATION
77

with parameters controlling wave front spatial orien-
tation, wave frequency and rate of attenuation. While
Gabor filters can be used to accurately represent local
patterns with complex textures, the associated compu-
tational requirements exclude real time applications.
To allow for real time face detection, we use an
efficient representation which describes changes of
local image contrast around a given pixel in angu-
lar and radial directions. In particular, rings of small
squares of pixels are used and the frequency of lumi-
nance changes on such rings is computed. Each single
square is treated as one value by computing the sum
of the luminance values of all the pixels that lie in-
side the square. The advantage of such an approach
is that is computationally very efficient. In fact, the
sum of the luminance values in a square can be eas-
ily computed (performing only two additions and two
subtractions, no matter what is the size of the square)
using integral images as proposed for the AdaBoost
face detector (Viola and Jones, 2001).
We define two types of discrete Gabor jets (for de-
tails about the term “jet” see (Lades et al., 1993)). The
first type detects angular frequencies on single rings,
while the second type detects angular frequencies for
the radial contrast between two rings with the same
number of elements.
Type 1 Jets. Each jet of the first type is character-
ized by the radius r of the ring, the number of squares
n = 2
k
and the center (anchoring) point (x, y). The
sizes of all the squares on the ring are equal.
The sequence of the n luminance values cor-
responding to the squares is normalized in order
to be included in the unit interval [0,1]. This en-
sures robustness to illumination changes. Finally, the
sequence of normalized luminance values is trans-
formed with DFT. Only the first n/2 of the complex
DFT coefficients are joined to the output feature vec-
tor. The mean value (DC) from the DFT is excluded
from the feature vector.
Type 2 Jets. This type of jet consists of two rings
with radii r
1
< r
2
with the same center (x,y) and with
the same number n = 2
k
of squares.
In contrast to the type I jets, now the mean value
of each square is analyzed. This is done in order to
compensate for differences in the size of squares in
the inner and outer ring of the jet. Differences are
taken between the mean values from the inner ring
and the mean values from the corresponding outer
ring. Next, the obtained differential signal is normal-
ized to the unit interval and then transformed by DFT.
Again, only the first n/2 of DFT complex coefficients
are joined to the output feature vector. In contrast to
Table 1: Parameters of the discrete Gabor jets used in this
work. Shown are the number of squares (n) used in the Ga-
bor jets, and the radii (r
1
, r
2
) of the rings in pixels. The
radii correspond to faces with a distance of 45 pixels be-
tween eye-centers and are scaled up or down to detect faces
with bigger or smaller inter-eye distance.
Type
1 1 1 1 2 2
n 16 16 32 32 16 32
r
1
16 24 12 19 16 12
r
2
– – – – 24 19
the type I jets, the mean value (DC) is also included
in the feature vector.
To detect fiducial points at different scales, the
radii of the rings are scaled up by steps of 1.15 un-
til the rings become bigger than the input image. The
size of the squares in the rings is adapted such that the
squares are as big as possible but do not overlap. The
exact parameters of the feature extractors used in this
work can be found in Table 1.
2.2 Feature Extraction II: Modified
Linear Discriminant Analysis
To compute a low-dimensional representation of the
DGJ feature vectors, a modified version of LDA
(Hotta et al., 1998) is used. The motivation for us-
ing a modified version of LDA is that with classical
LDA it is difficult to achieve good separation between
face fiducial points and non-face fiducial points. The
reason for this difficulty seemingly is that the distri-
butions of the face and non-face classes are very dif-
ferent, in particular one can expect the non-face class
to have a much larger variance than the face class.
Therefore, in this work we employ a version of LDA
in which the concepts of within-class and between-
class variance and related scatter matrices are modi-
fied. As a side effect, the modified version of LDA
we are using allows to obtain vectorial discriminative
features, even in the case of two-class problems.
Classical LDA maximizes the ratio of between-
class variance var
b
to within-class variance var
w
(Fisher, 1936; Fukunaga, 1992):
f
X
=
var
b
(X)
var
w
(X)
var
b
(X) = kx
f
− xk
2
+ kx
¯
f
− xk
2
(1)
var
w
(X) =
1
|I
f
|
∑
i∈I
f
kx
i
−
x
f
k
2
+
1
|I
¯
f
|
∑
i∈I
¯
f
kx
i
−
x
¯
f
k
2
,
where the training set X of feature vectors is divided
into the face class indexed by I
f
and the non-faceclass
with remaining indices I
¯
f
.
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
78

The non-face class is very differentiated, and,
therefore, it is difficult to minimize its within-class
variance. To solve this problem, we modify the ex-
pression for the within-class variance such that it only
takes into account the face class. The expression for
the between-class variance is modified such that the
non-face examples are placed as far as possible from
the center of the face-class. This leads to the fol-
lowing equations for the modified within-class and
between-class variance:
m
X
=
mvar
b
(X)
mvar
w
(X)
mvar
b
(X) = k
x
f
− xk
2
+
1
|I
¯
f
|
∑
i∈I
¯
f
kx
i
−
x
f
k
2
(2)
mvar
w
(X) =
1
|I
f
|
∑
i∈I
f
kx
i
−
x
f
k
2
.
The actual optimization procedure that allows to
compute discriminant vectors from training data is
very similar to the classical approach (for more de-
tails see (Hotta et al., 1998; Naruniec and Skarbek,
2007)).
2.3 Classification and Postprocessing
The feature extraction and dimension reduction steps
described above result in l-dimensional feature vec-
tors, where for each edge pixel we have one feature
vector. To classify the edge pixels as eye corner, nose
corner, mouth corner, or non-face, the euclidean dis-
tance d of the feature vector x to the centroid of each
of the seven classes is computed. If the distance d to
the centroid c of a given class is lower than a specified
threshold, the edge pixel is classified as belonging to
the corresponding class. The distance thresholds for
separate facial features are tuned to the equal error
rate (equal values of false rejection rate and false ac-
ceptance rate) during the training process.
After classifying all of the edge points as belong-
ing to one of the seven classes, referencegraph match-
ing is performed. The reference graph consists of
mean distances between the chosen fiducial points
and has been computed using a set of 100 face im-
ages. All of the relations have been measured assum-
ing, that the distance between the inner eye corners is
always equal to 1 (see Fig. 3). To perform the graph
matching, for each scale all possible combinations of
the classified facial features are fitted to the reference
distances. If the likelihood of the analyzed set of
points, given the reference graph, is high, this set is
marked as a face. To avoid checking all of the combi-
nations, some preliminary checks may be performed.
For example one can check if the left eye is on the left
edge length
A 1.00
B 1.05
C
1.02
D 1.02
E
1.5
F 0.85
G 0.85
Figure 3: Fiducial points and their distance relations used
in distance matching algorithm.
side of the right eye, or if the nose is lower than the
eyes.
In the next step, the closest results are merged
to avoid multiple detections. Finally, outer eye cor-
ners of the found faces are searched within the closest
neighborhoodof the inner eye corners. The eye center
position is placed in the middle of the inner and outer
eye corners.
For more details about the classification and post-
processing steps, see (Naruniec and Skarbek, 2007;
Naruniec et al., 2007).
3 FACE DETECTION USING
COLOR INFORMATION
As was shown in previous publications (Naruniec and
Skarbek, 2007; Naruniec et al., 2007), face detection
using DGJs allows to achieve very good results, i.e. a
large number of faces present in the test images is
detected, while non-faces are only rarely accepted as
faces. However, DGJ-based face detection ignores a
large part of the information contained in digital im-
ages, namely color information. Hence, by making
use of color information it might be possible to further
improve the results of DGJ-based face detection. To
make use of color information, the eye coordinates re-
turned by the DGJ method are used to extract rectan-
gular image patches containing face candidates. The
face candidates are then verified using color informa-
tion and probabilistic models of image patches.
The details of the color-based face detection
method are described in the following sections, start-
ing with a description of probabilistic models for skin
color and other colors. The steps that are necessary
to combine DGJs and the color-based method are de-
scribed in section 4.
FACE DETECTION USING DISCRETE GABOR JETS AND COLOR INFORMATION
79
3.1 Modeling Skin Color and Other
Colors
The main idea underlying our probabilistic color-
based face detection method is to describe images of
frontal upright faces as a mixture of pixels that have
skin-like color and of pixels that have other colors. To
model the distributions of skin color and other (non-
skin) colors, the approach described in (Jones and
Rehg, 2002) is used. More specifically, the distribu-
tions of skin and non-skin color are learned from the
database described in (Jones and Rehg, 2002). The
database contains nearly 1 billion pixels labeled as
skin or non-skin and thus allows to build a skin detec-
tor which is relatively robust to skin color variations
caused by variations in ethnicity, scene illumination,
or camera characteristics.
To model the distributions of skin and non-
skin color, three-dimensional histograms of size
16×16×16 are used, i.e. the 256 possible values of
the R, G, and B channels are quantized into 16 equally
spaced bins. Learning the distribution of skin (non-
skin) color then corresponds to counting the number
of pixels labeled as skin (non-skin) for every bin of
the histogram and dividing by the total number of pix-
els labeled as skin (non-skin). The result of training
are a vector of probabilities θ
s
for the skin color his-
togram and a vector of probabilities θ
o
for the non-
skin color histogram. For each bin in the skin and
non-skin histograms, the probability vectors describe
how probable it is that a pixel has a combination of
R, G, and B values drawn from that bin. Now, the
color c = {R,G,B} of any pixel can be modeled as a
mixture of the distributions of skin color and non-skin
color:
p(c|θ
s
,θ
o
,π) = p(c|θ
s
)π+ p(c|θ
o
)(1− π). (3)
Here, the probability π is used to describe how prob-
able it is a priori that a pixel has skin color. Using
this model, the posterior probability for skin can be
computed using Bayes rule.
p(skin|c,θ
s
,θ
o
,π) =
p(c|θ
s
)π
p(c|θ
s
)π+ p(c|θ
o
)(1− π)
(4)
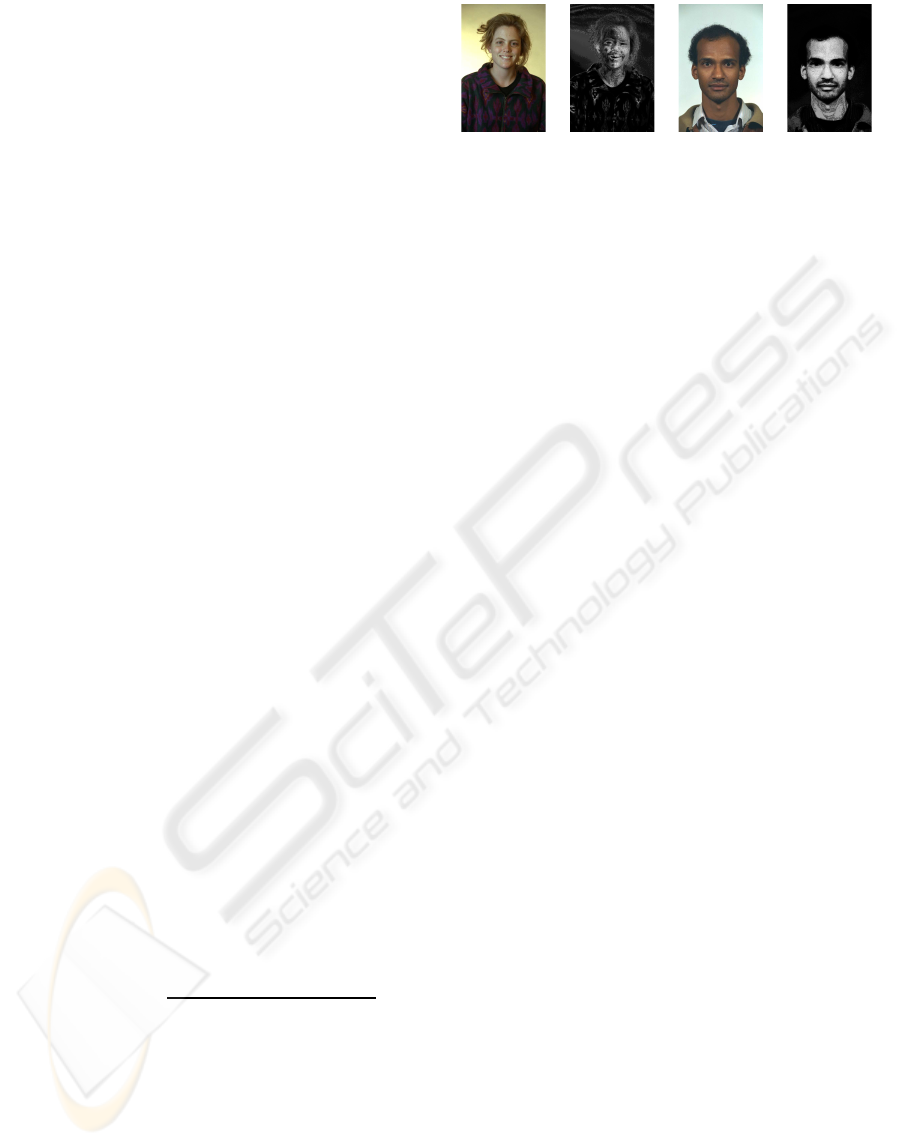
Typical results of computing skin probability for
some color images are shown in Fig. 4.
Note that computing skin probability maps can be
done relatively fast. To compute an index into the
skin and non-skin histograms, two integer additions
and two integer multiplications are necessary for each
pixel. After looking up the values corresponding to
the index in the histograms, two floating point multi-
plications, one floating point addition, and one float-
ing point division are necessary. In summary each
Figure 4: Examples for skin detection. Left: original image,
right: results of skin detection. Bright pixels represent high
skin probability, dark pixels represent low skin probability.
As can be seen skin detection with color histograms yields
good results independently of ethnicity.
pixel thus requires only four integer operations, four
floating point operations, and two memory accesses,
making the computation of skin probability maps at
high framerates feasible.
While it would be possible to directly use skin
probabilities, for example to filter out regions not con-
taining faces, we have developed a more powerful ap-
proach, which allows to model the shape of regions
containing skin color. This approach is described in
the following.
3.2 Modeling Colored Image Patches
Assuming that the color of pixels at differentpositions
is independent, the probability for observing colors c
i
and c
j
at positions i and j is
p(c
i
,c
j
|θ
s
,θ
o
,π) = p(c
i
|θ
s
,θ
o
,π)p(c
j
|θ
s
,θ
o
,π). (5)
Now the probability for observing an image patch
with N pixels can be expressed as follows:
p(c
1
,.. ., c
N
|θ
s
,θ
o
,π) =
N
∏
i=1
p(c
i
|θ
s
,θ
o
,π
i
). (6)
Here we have slightly changed the notation to express
the fact that the mixture coefficients depend on the
position of pixels within an image patch. The model
for image patches with N pixels is thus fully specified
by a vector of N mixture coefficients π = {π
1
,.. ., π
N
}
and by the histogram parameters θ
s
and θ
o
.
3.3 Learning Parameters of Image
Patch Model
We use the skin and non-skin color histograms θ
s
and
θ
o
learned from the dataset described in (Jones and
Rehg, 2002) (see previous section). Learning param-
eters of an image patch model then just corresponds
to learning the mixture coefficients π
i
for every pixel
in the patch.
Given a training set of image patches, the mixture
coefficients are computed with a simple maximum-
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
80
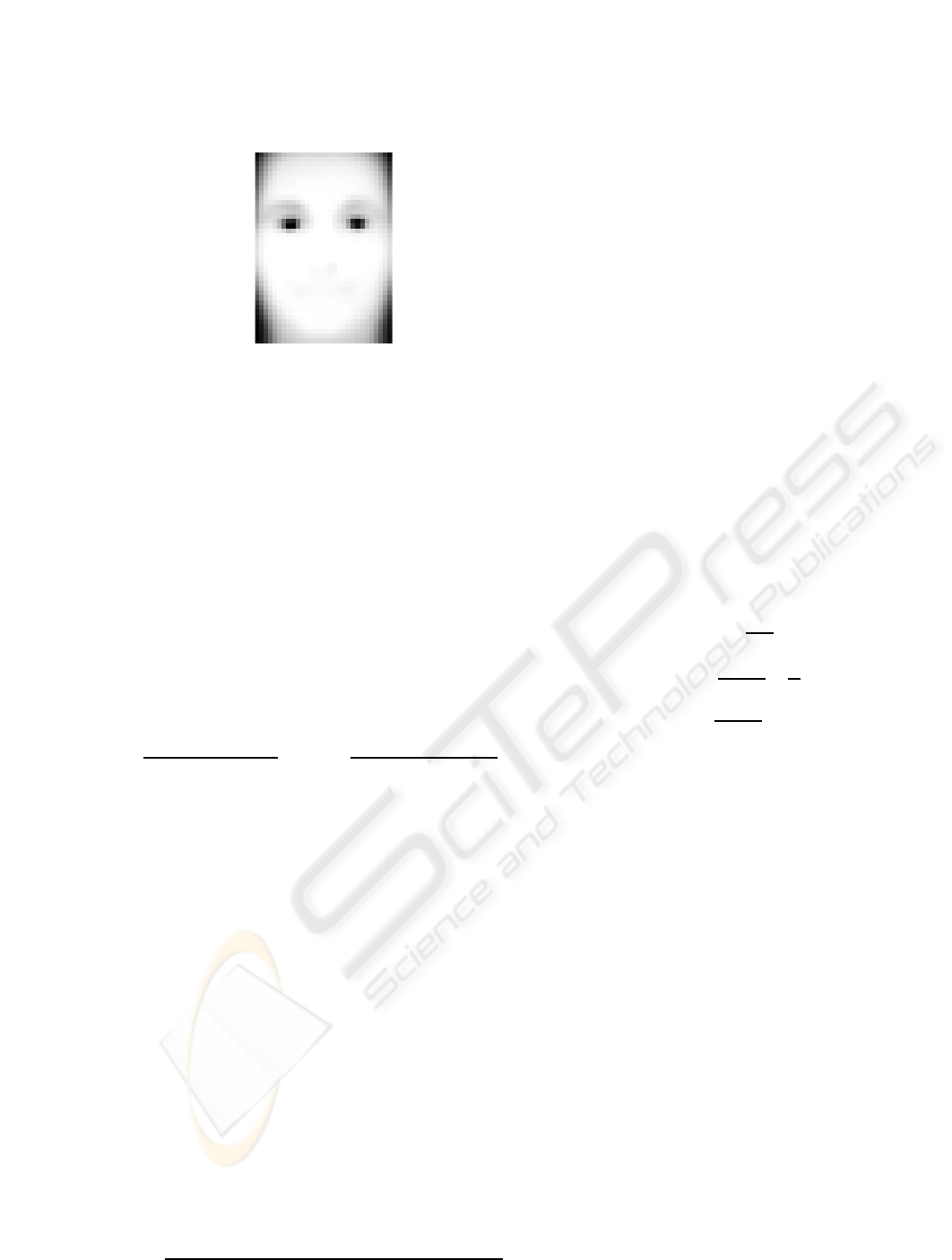
Figure 5: Mixture coefficients of the model for face image
patches. Bright pixels indicate a high probability for skin,
dark pixels indicate a low probability for skin.
likelihood method. Denoting the color values of train-
ing image j at position i by c
ij
, the number of train-
ing patches by M, and the collection of all training
patches by D, the likelihood for the mixture coeffi-
cients π = {π
1
,.. .,π
N
} is
p(D|θ
s
,θ
o
,π) =
M
∏
j=1
N
∏
i=1
p(c
ij
|θ
s
,θ
o
,π
i
). (7)
The log-likelihood then is
log p(D|θ
s
,θ
o
,π) =
M
∑
j=1
N
∑
i=1
log p(c
ij
|θ
s
,θ
o
,π
i
). (8)
Taking the partial derivativeof the log-likelihood with
respect to π
i
we obtain
∂log p(D|θ
s
,θ
o
,π)
∂π
i
=
M
∑
j=1
N
∑
i=1
p(c
ij
|θ
s
) − p(c
ij
|θ
o
)
p(c
ij
|θ
s
,θ
o
,π
i
)
.
(9)
Finally, to maximize the log-likelihood, the partial
derivatives are used to perform gradient ascent until
convergence. In our experience this method for maxi-
mizing the log-likelihood converges fast and reliably.
The result of computing the mixture coefficients for
the face class is shown in Fig. 5.
3.4 Face Detection using the Image
Patch Model
To perform face detection with the image patch
model, two sets of mixture coefficients are used. One
set, denoted by π
f
, is learned from a large number
of image patches containing faces. The other set, de-
noted by π
o
, is learned from a large number of image
patches not containing faces. Now, given an image
patch P and a prior probability p( f) for faces, Bayes
rule can be used to compute the probability that the
patch contains a face:
p( f|P,π
f
,π
o
,θ
s
,θ
o
) (10)
=
p(P|π
f
,θ
s
,θ
o
)p( f )
p(P|π
f
,θ
s
,θ
o
)p( f ) + p(P|π
o
,θ
s
,θ
o
)(1− p( f))
We decide that the image patch contains a face if the
posterior probability is bigger than a threshold τ.
4 COMBINING DISCRETE
GABOR JETS AND COLOR
INFORMATION
The two methods are combined by first running
face detection using discrete Gabor jets (DGJ) on a
grayscale version of the input image. Then, the face
candidates found by the DGJ method are verified with
the help of the color based method described in sec-
tion 3.
More specifically, a bounding box is computed
from the coordinates of left eye and right eye as re-
turned by DGJ. To compute the width w, height h, and
coordinates x,y of the top left corner of the bounding
box, the following equations are used:
w = (x
r
− x
l
) f
w
(11)
h =
wh
s
w
s
(12)
x =
x
l
+ x
r
2
−
w
2
(13)
y =
y
l
+ y
r
2
− h f
y
(14)
Here x
l
,y
l
and x
r
,y
r
denote the coordinates of the
pupils of the left and right eye returned by the DGJ
method. The anthropometric constants f
w
and f
h
are
set to 2.1 and 0.37. The width w
s
and height h
s
of
the standard size face patch are set to 30 pixels and 40
pixels.
After computation of the bounding box, the cor-
responding rectangular region is extracted from the
input image and resized to standard size. To resize
patches bigger than the standard size, lowpass filter-
ing followed by bilinear interpolation is used. To re-
size patches smaller than the standard size, only bi-
linear interpolation is used. Face candidates found
by DGJ are accepted as true faces if the posterior
probability for face (see equation 10) is bigger than
a threshold τ. The threshold can be used to vary the
characteristics of the combined detector and to create
ROC curves.
5 RESULTS
The combined face detector was tested on images
from the BANCA and VALID databases (Fox et al.,
2005; Bailly-Bailli´ere et al., 2003). For testing, first,
the DGJ method was applied to compute a set of face
FACE DETECTION USING DISCRETE GABOR JETS AND COLOR INFORMATION
81
1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0.5
10
0
10
1
10
2
10
3
False Positives (Number)
True Positives (Rate)
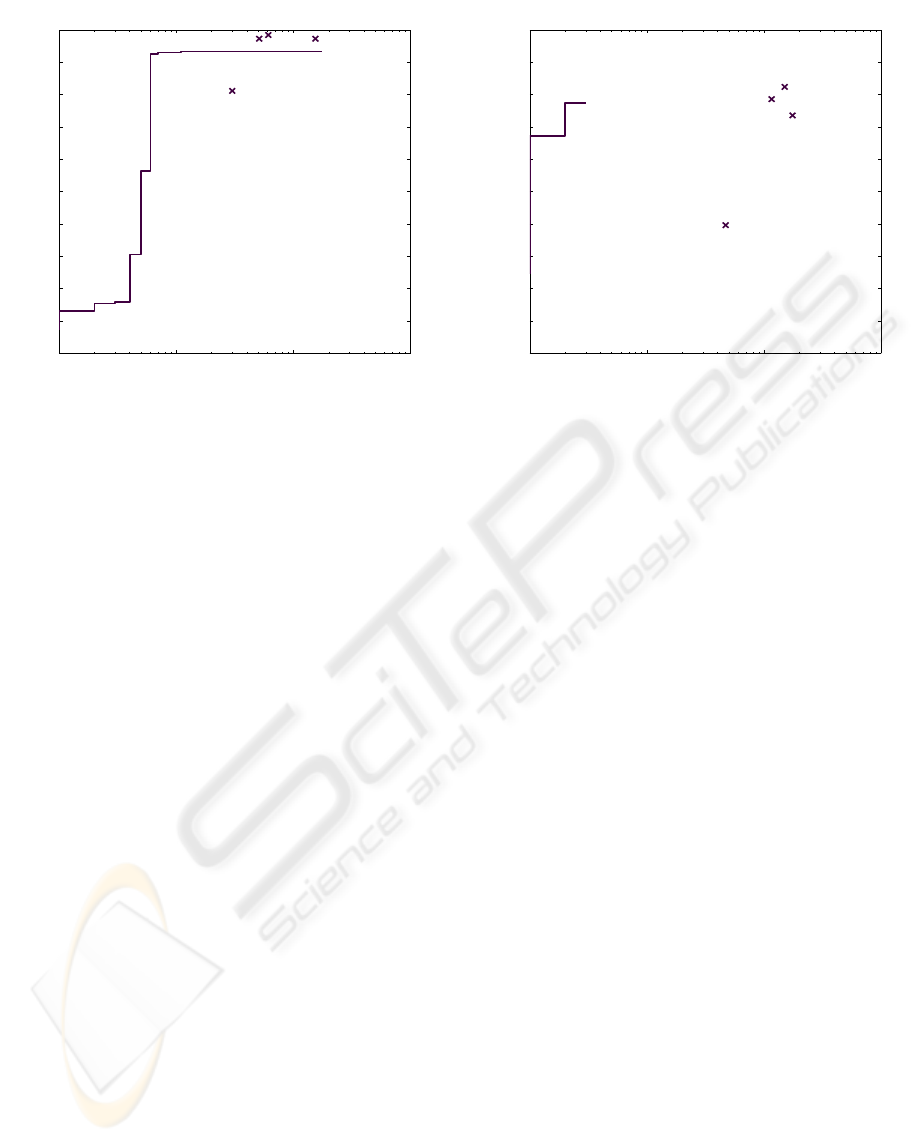
Figure 6: ROC curve for face detection on the BANCA
database with a combination of DGJ and color based face
detection. The rightmost point on the ROC curve corre-
sponds to the result achieved with DGJ alone, while the
other points on the ROC curve where computed by combin-
ing DGJ with the color based method. The crosses represent
the results obtained by OpenCV detector.
candidates for each input image. Each face candidate
was then verified with the help of the image patch
model from section 3. By varying the threshold for
acceptance, ROC curves were created.
In order to compare the performance of our com-
bined face detector with a standard face detector, the
OpenCV implementation of the detector presented
in (Viola and Jones, 2001) was employed. In the
OpenCV implementation there are four classifiers,
namely, default, alt, alt2 and alttree. Table 2 shows
the performance of the OpenCV detectors for the
BANCA and VALID datasets.
The ROC curvefor the BANCA database is shown
in Fig. 6 and the ROC curve for the VALID database
is shown in Fig. 7. The crosses in these figures rep-
resent the true positive rate and number of false posi-
tives achieved with the OpenCV detector.
In both figures the rightmost point on the ROC
curves corresponds to using a threshold of 0, i.e. all
face candidates computed with the DGJ method are
accepted. As can be seen, higher thresholds allow
to reject many false positives detected by DGJ, while
keeping almost all true positives. The results are es-
pecially striking for the BANCA database, where the
color information allowed to reduce the number of
false positives from about 180 to less than 20, without
loosing any true positives. For the VALID database
the DGJ detector returned only three false positives
but nevertheless the color information allows to re-
1
0.99
0.98
0.97
0.96
0.95
10
0
10
1
10
2
10
3
False Positives (Number)
True Positives (Rate)
Figure 7: ROC curve for face detection on the VALID
database with a combination of DGJ and color based face
detection. The rightmost point on the ROC curve corre-
sponds to the result achieved with DGJ alone, while the
other points on the ROC curve where computed by combin-
ing DGJ with the color based method. The crosses represent
the results obtained by OpenCV detector.
move these while keeping almost all true positives.
Comparing the ROC curves with the crosses in
Fig. 6, it can be perceived that although three of the
OpenCV detectors have a slightly better true positive
rate than our detector, they bring about a high number
of false positives. It can be also seen that the true pos-
itive rate deteriorates when an OpenCV detector with
a smaller number of false positives is employed. On
the contrary, combining DGJ-based and color based
face detection, leads to a considerable decrease in the
number of false positives while maintaining the true
positive rate.
For the VALID database, as it can be observed
in Fig. 7, the DGJ detector achieves a considerably
small number of false positives and nearly the same
true positive rate as the OpenCV detector. Interest-
ingly, it can be observed that even the small number
of false positives resulting from using DGJ can be
reduced to zero, when color information is used for
classification.
6 CONCLUSIONS
In this work, an efficient face detection system was
presented. Firstly, the DGJ detector was employed for
face detection based on the brightness information of
the pixels in images. In the next step, color informa-
tion of the pixels was used to post-process the results
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
82

Table 2: Number of false positives (FP) and false nega-
tives (FN) for the BANCA dataset (520 images) and for the
VALID dataset (1590 images).
BANCA VALID
FP FN FP FN
default 154 7 175 21
alt2 61 4 150 14
alt 51 7 116 17
alttree 30 49 47 48
obtained by DGJ detector. To this end, colored image
patches were modeled and this model was employed
in the final decision-making about whether the face
detected by DGJ is true or false positive. The results
have shown that employing features related to color
information and combining them with brightness in-
formation will lead to a considerable decrease in the
number of false positives, while maintaining the true
positive rate. Consequently, using the system intro-
duced in this paper, will lead to a higher correct clas-
sification rate and face detection accuracy.
ACKNOWLEDGEMENTS
The work presented was developed within VIS-
NET II, a European Network of Excellence
(http://www.visnet-noe.org), funded under the
European Commission IST FP6 Programme. The
authors wish to express their thanks to this network
of excellence.
REFERENCES
Bailly-Bailli´ere, E., Bengio, S., Bimbot, F., Hamouz, M.,
Kittler, J., Mari´ethoz, J., Matas, J., Messer, K.,
Popovici, V., Por´ee, F., Ruiz, B., and Thiran, J.-P.
(2003). The BANCA database and evaluation proto-
col. In Audio- and Video-Based Biometric Person Au-
thentication, volume 2688 of Lecture Notes in Com-
puter Science.
Feraud, R., Bernier, O., Viallet, J.-E., and Collobert, M.
(2001). A fast and accurate face detector based on
neural networks. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 23(1):42–53.
Fisher, R. A. (1936). The use of multiple measurements in
taxonomic problems. Annals of Eugenics, 7:179–188.
Fox, N. A., O’Mullane, B. A., and Reilly, R. B. (2005).
VALID: A new practical audio-visual database, and
comparative results. In Audio- and Video-Based Bio-
metric Person Authentication, volume 3546 of Lecture
Notes in Computer Science.
Fukunaga, K. (1992). Introduction to Statistical Pattern
Recognition. Academic Press.
Gabor, D. (1946). Theory of communication. Journal of
the Institute of Electrical Engineers, 93(3):429–457.
Hotta, K., Kurita, T., and Mishima, T. (1998). Scale in-
variant face detection method using higher-order local
autocorrelation features extracted from log-polar im-
age. In International Conference on Face & Gesture
Recognition, page 70.
Hsu, R.-L., Abdel-Mottaleb, M., and Jain, A. (2002). Face
detection in color images. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 24(5):696–
706.
Huang, S.-H., Huang, S.-H., and Lai, S.-H. (2004). De-
tecting faces from color video by using paired wavelet
features. In Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 64–64.
Jones, M. J. and Rehg, J. M. (2002). Statistical color mod-
els with application to skin detection. International
Journal of Computer Vision, 46(1):81–96.
Lades, M., Vorbr¨uggen, J., Buhmann, J., Lange, J., von der
Malsburg, C., W¨urtz, R., and Konen, W. (1993). Dis-
tortion invariant object recognition in the dynamic
link architecture. IEEE Transactions on Computers,
42:300–311.
Naruniec, J. and Skarbek, W. (2007). Face detection by dis-
crete gabor jets and reference graph of fiducial points.
In Rough Sets and Knowledge Technology, volume
4481 of Lecture Notes in Computer Science.
Naruniec, J., Skarbek, W., and Rama, A. (2007). Face de-
tection and tracking in dynamic background of street.
In International Conference on Signal Processing and
Multimedia Applications (SIGMAP).
Rowley, H., Rowley, H., Baluja, S., and Kanade, T. (1998).
Neural network-based face detection. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
20(1):23–38.
Sung, K.-K. and Poggio, T. (1998). Example-based learning
for view-based human face detection. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
20(1):39–51.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 511–518.
Yang, M.-H. and Ahuja, N. (1998). Detecting human faces
in color images. In International Conference on Image
Processing (ICIP), pages 127–130.
Yang, M.-H., Kriegman, D. J., and Ahuja, N. (2001). De-
tecting faces in images: A survey. IEEE Transactions
on Pattern Analysis and Machine Intelligence, 24:34–
58.
FACE DETECTION USING DISCRETE GABOR JETS AND COLOR INFORMATION
83
