
OPTIMIZING SKELETAL STREAM PROCESSING FOR DIVIDE
AND CONQUER
Michael Poldner and Herbert Kuchen
University of M
¨
unster, Department of Information Systems, Leonardo Campus 3, D-48149 M
¨
unster, Germany
Keywords:
Parallel Computing, Algorithmic Skeletons, Divide & Conquer.
Abstract:
Algorithmic skeletons intend to simplify parallel programming by providing recurring forms of program struc-
ture as predefined components. We present a new distributed task parallel skeleton for a very general class
of divide and conquer algorithms for MIMD machines with distributed memory. Our approach combines
skeletal internal task parallelism with stream parallelism. This approach is compared to alternative topologies
for a task parallel divide and conquer skeleton with respect to their aptitude of solving streams of divide and
conquer problems. Based on experimental results for matrix chain multiplication problems, we show that our
new approach enables a better processor load and memory utilization of the engaged solvers, and reduces
communication costs.
1 INTRODUCTION
Parallel programming of MIMD machines with dis-
tributed memory is typically based on standard mes-
sage passing libraries such as MPI (MPI, 2008),
which leads to platform independent and efficient
software. However, the programming level is still
rather low and thus error-prone and time consuming.
Programmers have to fight against low-level commu-
nication problems such as deadlocks, starvation, and
termination detection. Moreover, the program is split
into a set of processes which are assigned to the dif-
ferent processors, whereas each process only has a lo-
cal view of the overall activity. A global view of the
overall computation only exists in the programmer’s
mind, and there is no way to express it more directly
on this level.
For this reasons many approaches have been sug-
gested, which provide a higher level of abstraction
and an easier program development to overcome the
mentioned disadvantages. The skeletal approach to
parallel programming proposes that typical communi-
cation and computation patterns for parallel program-
ming should be offered to the user as predefined and
application independent components, which can be
combined and nested by the user to form the skele-
tal structure of the entire parallel application. These
components are referred to as algorithmic skeletons
(E. Alba, 2002; Cole, 1989; J. Darlington, 1995;
H. Kuchen, 2002; Kuchen, 2002; K. Matsuzaki, 2006;
Pelagatti, 2003). Typically, algorithmic skeletons are
offered to the user as higher-order functions, which
get the details of the specific application problem as
argument functions. In this way the user can adapt the
skeletons to the considered parallel application with-
out bothering about low-level implementation details
such as synchronization, interprocessor communica-
tion, load balancing, and data distribution. Efficient
implementations of many skeletons exist, such that
the resulting parallel application can be almost as ef-
ficient as one based on low-level message passing.
Depending on the kind of parallelism used, skele-
tons can roughly be classified into data parallel
and task parallel ones. A data parallel skeleton
(G. H. Botorog, 1996; Kuchen, 2002; Kuchen, 2004)
works on a distributed data structure such as a dis-
tributed array or matrix as a whole, performing the
same operations on some or all elements of this data
structure. Task parallel skeletons (A. Benoit, 2005;
Cole, 2004; H. Kuchen, 2002; Kuchen, 2002; Poldner
and Kuchen, 2005; Poldner and Kuchen, 2006) cre-
ate a system of processes communicating via streams
of data by nesting and combining predefined process
topologies such as pipeline, farm, parallel composi-
tion, divide and conquer, and branch and bound. In
the present paper we will consider task parallel divide
and conquer skeletons with respect to their aptitude of
solving streams of divide and conquer problems.
181
Poldner M. and Kuchen H. (2008).
OPTIMIZING SKELETAL STREAM PROCESSING FOR DIVIDE AND CONQUER.
In Proceedings of the Third International Conference on Software and Data Technologies - PL/DPS/KE, pages 181-189
DOI: 10.5220/0001889301810189
Copyright
c
SciTePress
Divide and conquer is a well known computation
paradigm, in which the solution to a problem is ob-
tained by dividing the original problem into smaller
subproblems, solving the subproblems recursively,
and combining the partial solutions to the final so-
lution. A simple problem is solved directly without
dividing it further. Examples of divide and conquer
computations include various sorting methods such as
mergesort and quicksort, computational geometry al-
gorithms such as the construction of the convex hull
or the Delaunay triangulation, combinatorial search
such as constraint satisfaction techniques, graph al-
gorithmic problems such as graph coloring, numeri-
cal methods such as the Karatsuba multiplication al-
gorithm, and linear algebra such as Strassen’s algo-
rithm for matrix multiplication. In many cases there is
the need of solving multiple divide and conquer prob-
lems in sequence. Examples here are the triangulation
of several geometric figures, matrix chain multiplica-
tion, and factoring of large numbers.
In the present paper we will consider different task
parallel divide and conquer skeletons in the context of
the skeleton library Muesli (Kuchen, 2002; Poldner
and Kuchen, 2005; Poldner and Kuchen, 2006; Pold-
ner and Kuchen, 2008b; Poldner and Kuchen, 2008a),
which are used to solve streams of divide and con-
quer problems. Muesli is based on MPI internally in
order to inherit its platform independence. We have
implemented a new fully distributed divide and con-
quer skeleton and compare it to a farm of sequentially
working divide and conquer solvers, and to a fully dis-
tributed divide and conquer skeleton used in a previ-
ous version of Muesli. We will show that our new
approach enables a better processor load and memory
utilization of the engaged solvers, and reduces com-
munication costs.
The rest of this paper is structured as follows. In
section 2, we briefly introduce divide and conquer
skeletons and basic notions. In Section 3, we present
different parallel implementation schemes of the con-
sidered skeletons in the framework of the skeleton
library Muesli, and discuss their application in the
context of streams. Section 4 contains experimen-
tal results demonstrating the strength of our new dis-
tributed design. In Section 5 we compare our ap-
proach to related work, and finally, we conclude and
point out future work in section 6.
2 DIVIDE AND CONQUER
SKELETONS
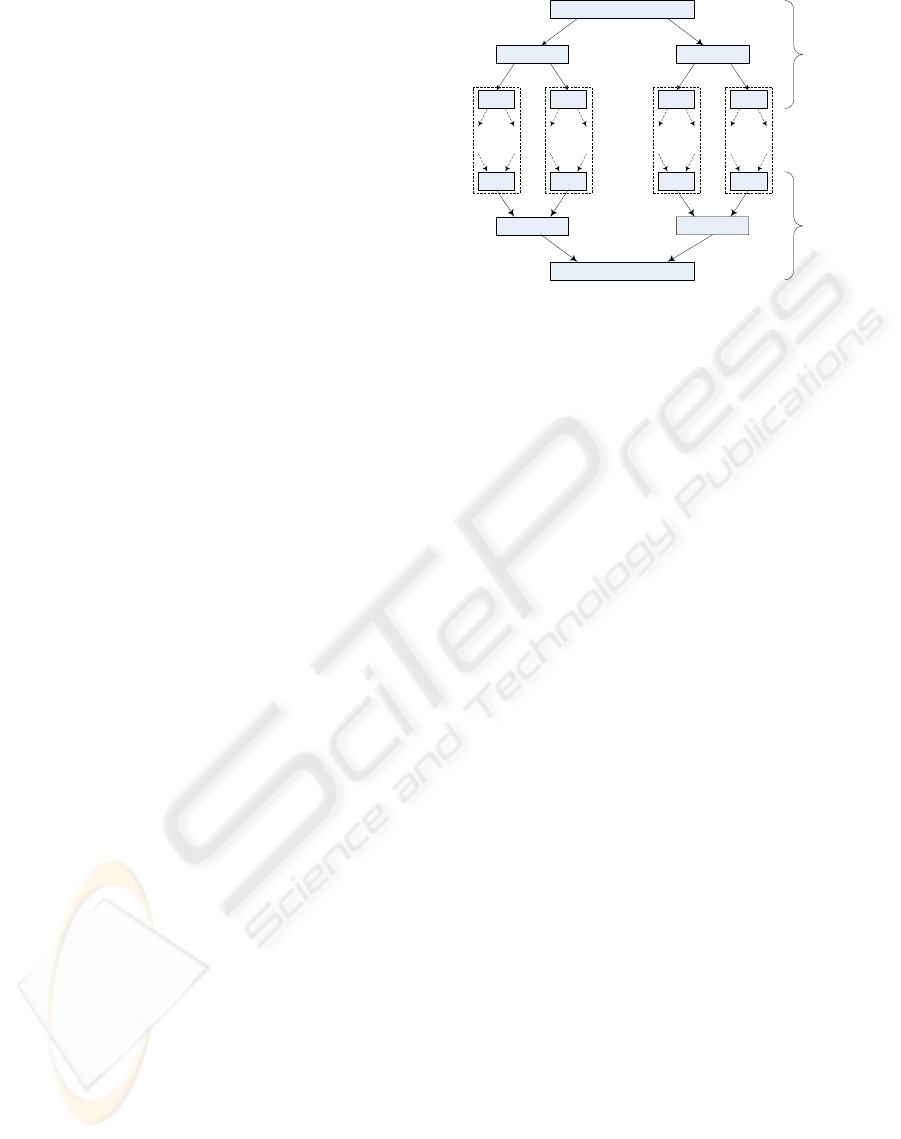
A divide and conquer algorithm solves an initial prob-
lem by dividing it into smaller subproblems, solving
Problem
N
Sub
T
Sub
T
Sub
T
Sub
T
Solution
... ... ... ...
work
pool
solution
pool
Figure 1: A divide and conquer tree.
the subproblems recursively, and combining the par-
tial solutions in order to get the final solution, whereas
simple problems are solved directly without dividing
them further. The computation can be viewed as a
process of expanding and shrinking a tree, in which
the nodes represent problem instances and partial so-
lutions, respectively (Fig.1).
A divide and conquer skeleton offers this basic strat-
egy to the user as predefined parallel component. Typ-
ically, the user has to supply four application spe-
cific basic operators, with which the user can ex-
actly adapt the skeleton to the considered problem:
a divide operator which describes how the consid-
ered (sub)problem can be divided into subproblems,
a combine operator which specifies how partial so-
lutions can be combined to the solution of the con-
sidered parent problem, an isSimple operator which
indicates if a subproblem is simple enough that it can
be solved directly, and last but not least a solve op-
erator, which solves a simple problem. During the
solution of a concrete divide and conquer problem,
the skeleton generates a multitude of subproblems and
partial solutions (i.e. the nodes in the divide and con-
quer tree), which are stored in a work pool, and a so-
lution pool respectively. In the beginning the work
pool only contains the initial problem, and the solu-
tion pool is empty. In each iteration one such problem
is selected from the work pool corresponding to a par-
ticular traversal strategy such as depth first or breadth
first. The problem is either divided into d subprob-
lems, which are stored again in the work pool, or it is
solved, and its solution is stored in the solution pool.
It may happen that a problem of size s is reduced to
d subproblems of sizes s
1
, . . . , s
d
with
∑
d
i=1
s
i
> s, e.g.
for the Karatsuba multiplication algorithm for large
integers or the Strassen algorithm for matrix multi-
plication. At least in this case, a depth first strategy
is recommended in order to avoid memory problems.
The order in which solutions are stored in the solu-
tion pool depends on the implemented traversal strat-
ICSOFT 2008 - International Conference on Software and Data Technologies
182
egy. It is recommended to combine partial solutions
as soon as possible in order to free memory. If the
solution pool contains d partial solutions, which can
be combined, they can be replaced by the solution of
the corresponding parent problem. In the end of the
computation the work pool is empty and the solution
pool only contains the solution of the initial problem.
2.1 A Design for a Fully Distributed
Divide and Conquer Skeleton
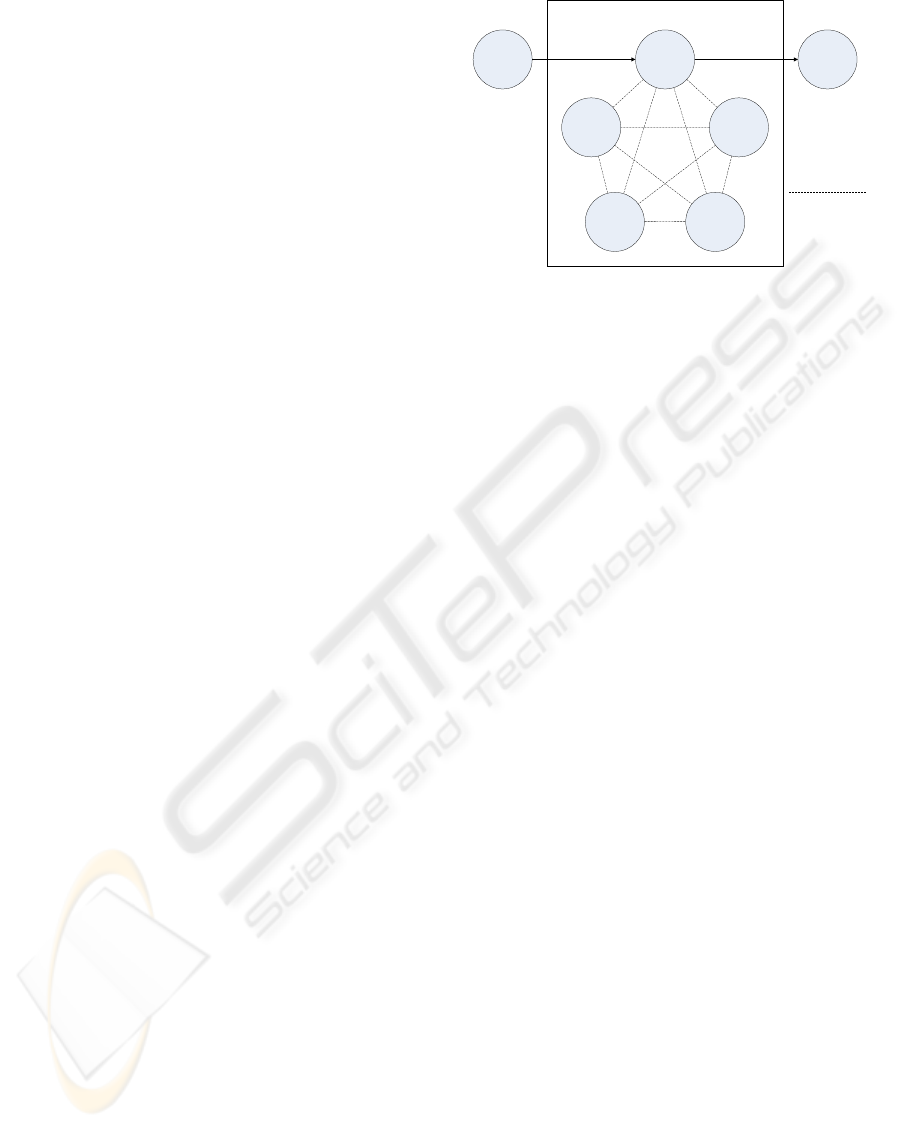
Figure 2 illustrates the design of the distributed di-
vide and conquer skeleton (DCSkeleton), which has
been used in a previous version of our skeleton library
Muesli (Poldner and Kuchen, 2008b). It consists of
a set of peer solvers, which exchange subproblems,
partial solutions, and work requests. In our exam-
ple, n = 5 solvers are used. The work pool and the
solution pool are distributed among the solvers, and
each of the solvers processes subproblems and par-
tial solutions from its own local pools. If a solver
finds it own work pool empty, it sends a work request
to a randomly selected neighbor corresponding to the
given internal topology, which triggers the load distri-
bution. If the work pool of the receiver is not empty,
it selects a subproblem from the work pool which is
expected to be big and delegates it to the sender. Sev-
eral topologies for connecting the solvers are possible.
The topology for connecting the solvers is exchange-
able without having to adapt the load balancing or ter-
mination detection algorithm. To simplify matters, in
this paper we will consider an all-to-all topology. For
larger number of processors, topologies like torus or
hypercube may lead to a faster propagation of work to
idle processors within the startup phase.
Exactly one of the solvers serves as an interface
to the skeleton, which is referred to as master solver.
The master solver receives a new divide and conquer
problem from the predecessor and delivers the solu-
tion to its successor. If the skeleton only consists of
a single solver there is no need for load balancing.
In this case, all communication parts are bypassed to
speed up the computation. Moreover, if the number of
subproblems generated by the DCSkeleton is limited
to one by a corresponding implementation of the is-
Simple operator, the user can enable a pure sequential
computation. In this case, the initial problem is in-
stantly identified as simple enough to solve it directly
by the user defined solve operator. Thus, there is no
need for a divide or combine operator call, and the
workpool and solution pool are bypassed as well.
The DCSkeleton consumes a stream of input val-
ues and produces a stream of output values. If the
master solver receives a new divide and conquer
DCSolver
DCSolver
DCSolver
DCSolver
DCSolver
predecessor successor
Distributed DC-Skeleton
entire
solution
Initial
problem
Master solver
Work requests,
partial solutions,
subproblems
Figure 2: A fully distributed divide and conquer skeleton.
problem, the communication with the predecessor is
blocked until the received problem is solved. Thus,
the DCSkeleton can only process one divide and con-
quer problem at a time.
There are different variants for the initialization
of the skeleton with the objective of providing each
solver with a certain amount of work within the
startup phase. Our skeleton uses the most common
approach, namely root initialization, i.e. the initial
D&C problem is inserted into the local work pool of
the master solver. Subproblems are distributed ac-
cording to the load balancing scheme applied by the
solvers.
2.2 Forms of Parallelism
Considering task parallel process systems, two forms
of parallelism can be identified. The first one is the
skeletal internal parallelism, which follows from pro-
cessing one single problem by several workers in par-
allel. The DCSkeleton benefits from skeletal inter-
nal parallelism by solving one problem by all engaged
solvers in parallel. The second form of parallelism is
stream parallelism, which follows from the possibil-
ity of splitting up one data stream into many streams
and processing these streams in parallel. Somewhere
in the process system these streams have to be routed
to a common junction point in order to reunite them
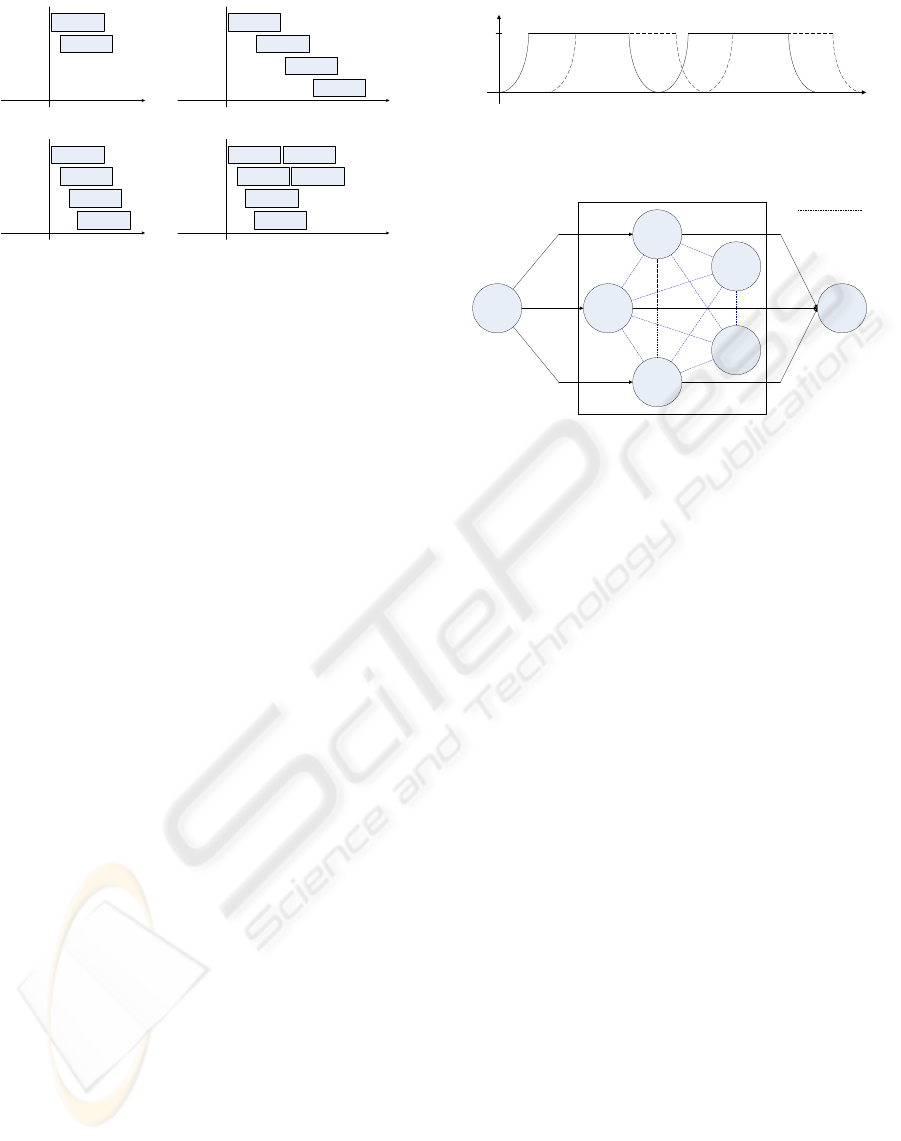
again. The farm topology depicted in figure 3, which
is offered by the Muesli skeleton library, benefits from
stream parallelism. Each worker of the farm takes
a new problem from its own stream, so that several
problems can be processed independently from each
other within the farm at the same time. In this paper,
we consider a farm of DCSkeletons which are each
configured to a purely sequential computation as de-
scribed above.
OPTIMIZING SKELETAL STREAM PROCESSING FOR DIVIDE AND CONQUER
183

worker
worker
worker
predecessor
worker
successor
problems solutions
Figure 3: A farm skeleton.
2.3 Streams of Divide and Conquer
Problems
Many applications require solving several divide and
conquer problems in sequence. Examples here are the
2D or 3D triangulation of several geometric objects,
matrix chain multiplication problems, in which parts
of the chain can be computed independently from
each other, or factoring of several large numbers. Us-
ing the Muesli skeleton library, the different tasks can
be represented as a stream, which is routed to either a
single DCSkeleton (fig. 2) or a farm (fig. 3).
MPI is internally based on a two-level communi-
cation protocol, the eager protocol for sending mes-
sages less than 32KB and the rendezvous protocol for
larger messages (Poldner and Kuchen, 2008a). For
the asynchronous eager protocol the assumption is
made that the receiving process can store the message
if it is sent and no receive operation has been posted
by the receiver. In this case the receiving process must
provide a certain amount of buffer space to buffer the
message upon its arrival. In contrast to the eager pro-
tocol, the rendezvous protocol writes the data directly
to the receive buffer without intermediate buffering.
This synchronous protocol requires an acknowledg-
ment from a matching receive in order for the send
operation to transmit the data. This protocol leads to
a higher bandwidth but also to a higher latency due
to the necessary handshaking between sender and re-
ceiver.
In the following we assume problem sizes greater
than 32KB, such as multiplying at least two 64 × 64
integer matrices, which enables the rendezvous proto-
col. Moreover, we act on the assumption that the time
between the arrivals of two problems is less than the
time for solving it sequentially. Otherwise we are not
able to speed up the overall computation because the
divide and conquer skeleton cannot be a bottleneck of
the process system.
The DCSkeleton processes one divide and con-
startup
phase
end
phase
main
phase
time
solvers
max. used
startup
phase
end
phase
main
phase
time
solvers
max.
used
startup
phase
end
phase
main
phase
Figure 4: utilization of the DCSkeleton.
quer problem by N solvers at a time, while the fully
distributed memory is available for the solution pro-
cess. Figure 4 depicts the utilization of the DCSkele-
ton within the startup, main, and end phase of solving
such a problem. In the beginning, a certain amount
of work has to be generated by divide calls and dis-
tributed among all solvers until each solver is pro-
vided with work. For this reason, this skeleton shows
high idle times within the startup phase. In particu-
lar when the initial problem is divided by the mas-
ter solver, all remaining solvers are idle. Within the
main phase of the computation all solvers are work-
ing to full capacity. Moreover, this phase is character-
ized by low communication costs due to the fact that
the solvers predominantly work on their local pools,
which is essential to achieve good speedups. Within
the end phase, partial solutions have to be collected
and combined to parent solutions. At the end, only
the master solver combines the entire solution, and all
other solvers are idle. Thus, the end phase is charac-
terized by high idle times as well. The duration of the
startup and end phase results from both, the complex-
ity of dividing problems and combining partial solu-
tions, and the sizes of the subproblems and partial so-
lutions which have to be sent over the network.
Processing streams of divide and conquer prob-
lems can be seen as a sequence of several startup,
main, and end phases. If the arrival rate of new prob-
lems is high, the master solver quickly becomes a bot-
tleneck of the system, because all engaged solvers,
which are running idle within an end phase of a com-
putation have to wait for new work which is not dele-
gated to them until the following startup phase. This
is caused by the fact that the master solver represents
the only interface to the skeleton. The more solvers
are used in the skeleton, the faster a problem will be
solved in the main phase of the computation. If the
arrival rate of new problems is low, the DCSkeleton
can be adapted to this rate by adjusting the number of
engaged solvers. Thus, the overall time for processing
all problems in the stream is the sum of the subtracted
times for solving the single problems.
The farm enables the user to solve N problems by
N workers in parallel, whereas each of the solvers is
represented by a sequentially working DCSkeleton.
A DCSkeleton configured to work sequentially has
ICSOFT 2008 - International Conference on Software and Data Technologies
184
time
Solver 1
time
Solver 2
Solver 3
Solver 4
time
Solver 1
Solver 2
Solver 3
Solver 4
time
Solver 1
Solver 2
Solver 3
Solver 4
time
Solver 1
Solver 2
Solver 3
Solver 4
a)
b)
c)
d)
Figure 5: Utilization of workers in a farm.
the advantage that it can speed up the computation
by bypassing the work and solution pool, and no di-
vide and combine operator calls as well as load bal-
ancing are necessary. The disadvantage is that only
the local memory of a solver is available for the so-
lution, so if the problems in the stream are expected
to be big, memory problems can occur. If there are
M < N problems in the stream, N − M workers of the
farm are never supplied with work, which causes high
idle times and bad runtimes irrespective of the arrival
rate of the problems (Fig. 5a). If the stream con-
tains M = N problems, each worker is sooner or later
provided with work (Fig. 5b). However, due to the
synchronous rendezvous protocol the solvers are pro-
vided with work one after another. Thus, in the begin-
ning many solvers are waiting for work and are idle.
Due to the sequential computation these solvers are
not able to support other solvers. The same problem
occurs in the end of the computation, when the solvers
working on the first problems are running idle. The
duration of the idle phases depends on the arrival rate
of problems. If the rate is high, good runtimes can be
achieved due to low idle times. However, a low ar-
rival rate may lead to the situation as shown in figure
5c. In this case, the first problem submitted to a solver
is solved before the last solvers of the farm are pro-
vided with work. Thus, the number of problems that
can be processed in parallel by the farm is less than N.
In particular for big problems a bad load balancing is
caused if the number of problems in the stream is a lit-
tle higher than the number of solvers (Fig. 5d). In this
case only few problems are delegated to each solver,
and the amount of work assigned to each solver differs
considerably. Only if the number of problems in the
stream is clearly higher than the number of solvers,
and the number of solvers is adapted to the arrival
rate, the average amount of work each solver has to
be done is nearly the same and good runtimes can be
expected.
startup
phase
end
phase
main
phase
time
solvers
max. used
startup
phase
end
phase
main
phase
time
solvers
max.
used
startup
phase
end
phase
main
phase
time
solvers
max.
used
Figure 6: Overlapped startup, main, and end phases.
DCSolver
Master
Solver
Master
Solver
Master
Solver
DCSolver
Pred Succ
Distributed DC-Skeleton
entire
solution
Initial
problem
Work requests,
partial solutions,
subproblems
Initial
problem
entire
solution
Initial
problem
entire
solution
Figure 7: A fully distributed divide and conquer skeleton
for stream processing.
2.4 A New Divide and Conquer
Skeleton for Stream Processing
The stream processing can be optimized by overlap-
ping phases of high workload with phases of poor
workload. In case of the DCSkeleton we find high
work load within the main phases and poor workload
within the startup und end phases of the computation.
If the solution of a divide and conquer problem is in its
startup or end phase, only few or even no subproblems
exist in the system which can be distributed among the
solvers. As shown in figure 6, the phases can be over-
lapped if more than one divide and conquer problem
is processed by the skeleton at a time. If the com-
putation of a solution is in its startup or end phase,
the processing of another problem may be in its main
phase. This leads to a more balanced processor load
due to the fact that the amount of work is increased
within the skeleton and thus idle times are reduced.
The number of problems which are prepared for load
distribution increases linearly with the number of di-
vide and conquer problems solved in parallel. Thus,
a less fine-granular decomposition of each divide and
conquer problem is necessary to guarantee a sufficient
amount of work for all solvers the more divide and
conquer problems are solved in parallel. By gener-
ating fewer but bigger subproblems the efficiency of
the skeleton can be increased not only by reducing the
number of divide and combine operator calls, but also
by raising the sequential proportion of the computa-
tion by applying solve on larger problems. Figure 7
illustrates the design of our new divide and conquer
OPTIMIZING SKELETAL STREAM PROCESSING FOR DIVIDE AND CONQUER
185

skeleton for stream processing (StreamDC), which is
based on the DCSkeleton. In contrast to the DCSkele-
ton it consists of n master solvers receiving new divide
and conquer problems from the predecessor. Each
solver maintains a multi-part work and solution pool
to distinguish between subproblems which emanate
from different initial problems. If the workpool stores
subproblems which emanate from problems received
from another solver, these problems are processed
first. In this case, a master solver delegating a sub-
problem is supplied with its corresponded partial so-
lution more quickly. This speeds up the overall com-
putation time of an internally distributed problem, and
an adequate supply of new work to the skeleton is
guaranteed by receiving new initial problems from the
predecessor more quickly as well. If the arrival rate
of new problems is low, this skeleton behaves like a
DCSkeleton. An idle master solver sends work re-
quests and receives subproblems from its neighbors.
If the arrival rate of problems is high, each of the
master solvers receives new problems from its pre-
decessor, which increases the amount of work within
the skeleton. For larger number of processors, this
leads to a faster propagation of work to idle solvers in
the beginning of the computation, and increases the
utilization of solvers during the whole computation
as shown above. Thus, by applying the StreamDC
skeleton with application specific parameters, it can
be configured to be a hybrid of a pure stream pro-
cessing farm and the DCSkeleton. It can be adapted
to the arrival rate and the size of the divide and con-
quer problems which are to be solved so that the dis-
tributed memory utilization is improved. For this rea-
son, the StreamDC is able to solve problems, which
cannot be solved by a sequential DCSkeleton used in
farms due to the lack of memory. In comparison to
the DCSkeleton the new StreamDC skeleton benefits
from overlapping the startup and end phases of solv-
ing single problems by solving several problems in
parallel. Moreover, fewer problems must be prepared
for load distribution which reduces divide and com-
bine operator calls and increases the sequential part
of the computation.
The code fragment in figure 8 illustrates the ap-
plication of our StreamDC-Skeleton in the context of
the Muesli skeleton library. It constructs the process
topology shown in Fig. 7.
In a first step the process topology is created using
C++ constructors. The process topology consists of
an initial process, a dc process, and a final process
connected by a pipeline skeleton. The initial process
is parameterized by a generateStream method gen-
erating a stream of initial D&C problems that are to
be solved. The constructor StreamDC generates a to-
int main(int argc, char* argv[]) {
InitSkeletons(argc,argv);
// step 1: create process topology
Initial<Problem> initial(generateStreamOfProblems);
StreamDC<Problem,Solution>
dc(divide, combine, solveSeq, isSimple, d, 5, 3);
Final<Problem> final(fin);
Pipe pipe(initial,dc,final);
// step 2: start process topology
pipe.start();
TerminateSkeletons();
}
Figure 8: Example application using a distributed divide
and conquer skeleton.
tal number of n = 5 solvers (whereas 3 are master
solvers), which are provided with the four basic op-
erators divide, combine, solveSeq, and isSimple.
The function isSimple has to return true if the sub-
problem is simple enough to be solved sequentially by
the solveSeq operator. The parameter d corresponds
to the degree of the D&C tree and describes how many
subproblems are generated by divide and how many
subproblems are required by combine to generate the
solution of the corresponding parent problem.
3 EXPERIMENTAL RESULTS
The parallel test environment for our experiments
is an IBM workstation cluster (ZIV, 2008) of six-
teen uniform PCs connected by a Myrinet (Myricom,
2008). Each PC has an Intel Xeon EM64T proces-
sor (3.6 GHz), 1 MB L2 cache, and 4 GB memory,
running Redhat Enterprise Linux 4, gcc version 3.4.6,
and the MPICH-GM implementation of MPI.
In order to evaluate the performance and scal-
ability of the StreamDC skeleton, we have consid-
ered Strassen’s algorithm for matrix multiplication
(O(N
log
2
7
), where log
2
7 ≈ 2, 808) in order to mul-
tiply two randomly generated 1024 × 1024 integer
matrices. The Strassen algorithm (Strassen, 1969)
reduces a multiplication of two N × N matrices to
seven multiplications of
N
2
×
N
2
matrices. The stream
consists of 20 matrix multiplication problems, which
represents single matrix multiplications when solv-
ing a matrix chain multiplication problem A
1
· . . . · A
n
(Baumgartner, 2002; T.C. Hu, 1982; T.C. Hu, 1984).
Note that the skeleton behaves non-deterministically
in the way the load is distributed. Generating only
a few big subproblems can lead to an unbalanced
workload and to high idle times. In order to get re-
liable results, we have repeated each run up to 50
times and computed the average runtimes which are
shown in figure 9. Figure 10 depicts the correspond-
ICSOFT 2008 - International Conference on Software and Data Technologies
186
1234567891011121314
DCSkeleton 95,9
4
63,71 44,60 34,99 29,38 24,98 20,09 19,70 18,29 17,35 16,43 15,6
4
15,06 14,7
4
2MS 54,78 41,0
4
31,33 25,69 21,87 19,1
4
17,06 15,1
4
14,1
0
13,28 12,05 11,65 10,96
3MS 36,46 29,72 24,61 20,93 18,1
4
16,35 14,57 13,43 12,7
0
11,35 10,98 10,4
0
4MS 27,61 23,4
0
20,21 17,66 15,75 14,46 12,97 11,72 11,37 10,35 9,97
5MS 22,48 19,51 17,23 15,55 13,97 12,61 11,6
4
11,0
0
10,2
0
9,30
6MS 18,51 16,8
0
15,4
0
13,85 12,53 11,48 10,5
0
9,80 9,15
7MS 16,22 14,81 13,57 12,48 11,45 10,65 9,77 9,20
8MS 14,5
4
13,4
0
12,27 11,1
4
10,5
4
9,8
4
9,25
9MS 13,4
4
12,2
4
11,21 10,41 9,77 8,96
10MS 12,2
4
11,02 10,7
0
9,93 9,26
11MS 11,35 10,3
4
9,66 9,11
12MS 10,51 9,91 9,1
4
13MS 9,81 9,33
14MS 9,31
StreamDC 95,9
4
54,78 36,46 27,61 22,48 18,51 16,22 14,5
4
13,40 12,2
4
11,02 10,3
4
9,66 8,96
DCFarm 95,95 50,40 33,88 24,5
4
19,81 19,40 15,72 15,7
4
14,62 11,12 10,95 10,83 10,76 10,75
1234567891011121314
DCSkeleton 1,00 1,00 1,00 1,00 1,00 1,00 1,00 1,00 1,00 1,00 1,00 1,00 1,00 1,00
2MS 0,86 0,92 0,90 0,87 0,88 0,95 0,87 0,83 0,81 0,81 0,77 0,77 0,7
4
3MS 0,82 0,85 0,8
4
0,8
4
0,90 0,83 0,80 0,77 0,77 0,73 0,73 0,71
4MS 0,79 0,80 0,81 0,88 0,80 0,79 0,75 0,71 0,73 0,69 0,68
5MS 0,77 0,78 0,86 0,79 0,76 0,73 0,71 0,70 0,68 0,63
6MS 0,7
4
0,8
4
0,78 0,76 0,72 0,70 0,67 0,65 0,62
7MS 0,81 0,75 0,7
4
0,72 0,70 0,68 0,65 0,62
8MS 0,7
4
0,73 0,71 0,68 0,67 0,65 0,63
9MS 0,73 0,71 0,68 0,67 0,65 0,61
10MS 0,71 0,67 0,68 0,66 0,63
Laufzeiten
DCSolvers
Solvers
NormierteLaufzeiten
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
80,00
90,00
100,00
123
8,00
9,00
10,00
11,00
12,00
13,00
14,00
15,00
16,00
12
runtime
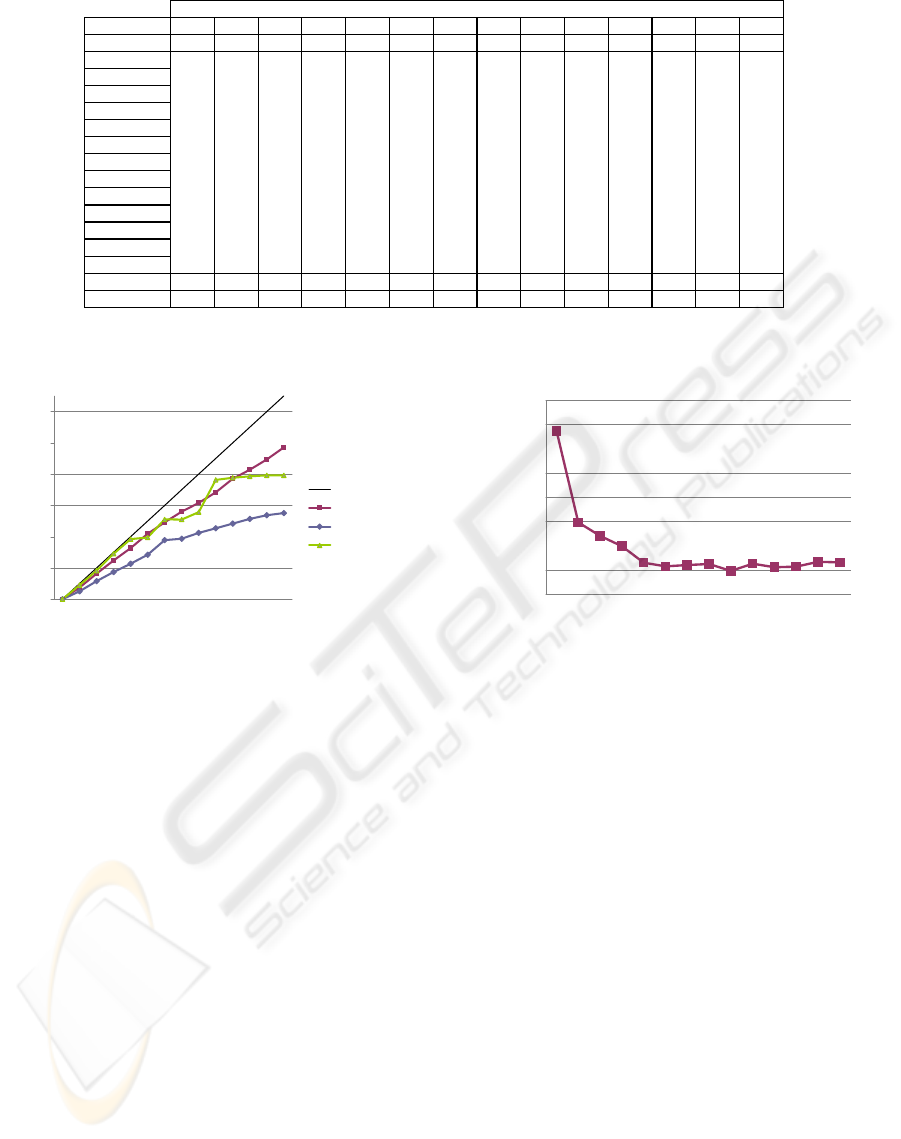
Figure 9: Runtimes for StreamDC, DCSkeleton and a sequential farm processing matrix multiplication problems.
1
3
5
7
9
11
13
1234567891011121314
#solvers
speedup
linear
StreamDC
DCSkeleton
DCFarm
Figure 10: Speedups for StreamDC, DCSkeleton and a se-
quential farm processing matrix multiplication problems.
ing speedups for the StreamDC, the DCSkeleton and
the farm of sequential DCSkeletons.
As one would expect, the StreamDC skeleton, which
combines stream parallelism with internal task paral-
lelism, is clearly superior to the DCSkeleton, which
only provides internal task parallelism. This is by the
fact that idle phases are reduced by overlapping the
startup and end phases of a solution. Moreover, the
number of subproblems is reduced which are prepared
for load distribution. Thus, the overhead for divide
and combine operator calls is decreased as well. The
speedups for the farm show a kind of stairs effect
which can be explained by figure 5d. In this case the
solvers are provided with a highly unbalanced amount
of work. In contrast to the StreamDC skeleton, the
farm is not able to do a load balancing.
Figure 11 shows the impact of additional master
solvers used for the computation. The runtime can be
decreased significantly by the use of up to five mas-
ter solvers. Then, the skeleton can not benefit from
additional master solvers because of the fact, that all
solvers are already busy.
ImpactofMastersolvers
8,00
9,00
10,00
11,00
12,00
13,00
14,00
15,00
16,00
1234567891011121314
#mastersolvers
runtime
Figure 11: Computation times depending on the number of
master solvers.
4 RELATED WORK
We are not aware of any previous systematic analysis
of different implementation schemes for stream pro-
cessing divide and conquer skeletons in the literature.
In (Aldinucci and Danelutto, 1999) it is shown that
any arbitrary composition of stream parallel skeletons
can be rewritten into an equivalent ”normal form”
skeleton composition, which offers better or equal
runtimes compared to the original program. This nor-
mal form is defined as a single farm build around a
sequential worker code. As we have shown in our
analysis and experiments, this conclusion warrants a
critical assessment. In particular for streams with few
big problems the workload can be highly unbalanced
in the farm. Moreover, the solution of big divide and
conquer problems may require much more memory
than provided by a sequential worker. Thus, such
problems can only be solved by several solvers in par-
allel.
Recent skeleton libraries such as eSkel (Cole,
2004), skeTo (K. Matsuzaki, 2006), and MaLLBba
OPTIMIZING SKELETAL STREAM PROCESSING FOR DIVIDE AND CONQUER
187

(E. Alba, 2002; J.R. Gonz
´
alez, 2004) include skele-
tons for divide and conquer. The MaLLBa implemen-
tation of the divide and conquer skeleton presented
in (E. Alba, 2002) is based on a farm (master-slave)
strategy, which is inapplicable for streams (Poldner
and Kuchen, 2008a). The distributed approach dis-
cussed in (J.R. Gonz
´
alez, 2004) offers the same user
interface as the MaLLBa skeleton and can be inte-
grated into the MaLLBa framework. Unfortunately,
neither runtimes of the considered example applica-
tions are presented nor the design was discussed in
the context of streams. In (Cole, 1997), Cole suggests
to offer divide and combine as independent skeletons.
But this approach has not been implemented in eSkel.
The eSkel Butterfly-Skeleton (Cole, 2004) is based on
group partitioning and supports divide and conquer
algorithms in which all activity occurs in the divide
phase. In contrast to our approach, the number of
processors used for the Butterfly skeleton starts from
a power of two. This is due to the group partitioning
strategy. Note that algorithms like Strassen or Karat-
suba produce a number of subproblems which is not a
power of two. The skeTo library (K. Matsuzaki, 2006)
only provides data parallel skeletons and is based on
the theory of Constructive Algorithmics. Restricted
data parallel approaches are discussed in (Bischof,
2005; Gorlatch, 1997). In (Gorlatch, 1997), a pro-
cessor topology called N-graph is presented, which
is used for a parallel implementation of a divide and
conquer skeleton in a functional context. Hermann
presents different general and special forms of divide
and conquer skeletons in context of the purely func-
tional programming language HDC, which is a sub-
set of Haskell (Herrmann, 2000). A mixed data and
task parallel approach can be found in (Y. Bai, 2007).
However, we are not aware of any implementation of
a divide and conquer skeleton which combines stream
processing and internal task parallelism.
5 CONCLUSIONS
We have analyzed alternative topologies for process-
ing streams of divide and conquer problems. After in-
troducing the design of the fully distributed DCSkele-
ton, which was used in a previous version of the
skeleton library Muesli, we have considered a dis-
tributed farm of a sequentially working DCSkeletons
as well as a fully distributed DCSkeleton in the con-
text of streams. We suggest combining skeletal inter-
nal task parallelism with stream parallelism to achieve
both, better memory utilization and a reduction of idle
times of the engaged solvers. Moreover, we present a
new divide and conquer skeleton optimized for stream
processing. By applying the skeleton with applica-
tion specific parameters, it can be configured to be
a hybrid of a pure stream processing farm and the
DCSkeleton, and it can range between both extremes.
In comparison to the DCSkeleton the new StreamDC
skeleton benefits from overlapping the startup and end
phases of solving single problems by solving sev-
eral problems in parallel. The advantage is, that only
few problems must be prepared for load distribution
which reduces divide and combine operator calls and
increases the sequential part of the computation. As
we have shown, the new StreamDC skeleton is clearly
superior to the DCSkeleton. In comparison to a farm
of sequentially working DCSkeletons it offers a better
scalability, which is advantageous in particular when
only few divide and conquer problems have to be
solved. Moreover, the complete sharing of the dis-
tributed memory is a great advantage compared to a
farm, in which the solvers only have access to their
own local memory. Thus, the new StreamDC is able
to solve problems, which cannot be solved by a se-
quential DCSkeleton used in farms due to the lack
of memory. In future work we intend to investigate
alternative stream based implementation schemes of
skeletons for branch and bound and other search al-
gorithms.
REFERENCES
A. Benoit, M. Cole, J. H. S. G. (2005). Flexible skeletal pro-
gramming with eskel. In Proc. EuroPar 2005. LNCS
3648, 761–770, Springer Verlag, 2005.
Aldinucci, M. and Danelutto, M. (1999). Stream paral-
lel skeleton optimization. In Proceedings of the 11th
IASTED International Conference on Parallel and
Distributed Computing and Systems, MIT, Boston,
USA. IASTED/ACTA press.
Baumgartner, G. (2002). A high-level approach to synthesis
of high-performance codes for quantum chemistry.
Bischof, H. (2005). Systematic development of parallel pro-
grams using skeletons. In PhD thesis. Shaker.
Cole, M. (1989). Algorithmic Skeletons: Structured Man-
agement of Parallel Computation. MIT Press.
Cole, M. (1997). On dividing and conquering indepen-
dently. In in Proceedings of Euro-Par’97, LNCS 1300,
pages 634-637. Springer.
Cole, M. (2004). Bringing skeletons out of the closet:
A pragmatic manifesto for skeletal parallel program-
ming. In Parallel Computing 30(3), 389–406.
E. Alba, F. Almeida, e. a. (2002). Mallba: A library of
skeletons for combinatorial search. In Proc. Euro-Par
2002. LNCS 2400, 927–932, Springer Verlag, 2005.
G. H. Botorog, H. K. (1996). Efficient parallel program-
ming with algorithmic skeletons. In Proc. Euro-
Par’96. LNCS 1123, 718–731, Springer Verlag, 1996.
ICSOFT 2008 - International Conference on Software and Data Technologies
188

Gorlatch, S. (1997). N-graphs: scalable topology and de-
sign of balanced divide-and-conquer algorithms. In
Parallel Computing, 23(6), pages 687-698.
H. Kuchen, M. C. (2002). The integration of task and
data parallel skeletons. In Parallel Processing Letters
12(2), 141–155.
Herrmann, C. (2000). The skeleton-based parallelization of
divide-and-conquer recursions. In PhD thesis. Logos.
J. Darlington, Y. Guo, H. J. Y. (1995). Parallel skeletons
for structured composition. In in Proceedings of ACM
SIGPLAN Symposium on Principles and Practice of
Parallel Programming, pages 19-28. ACM Press.
J.R. Gonz
´
alez, C. Le
´
on, C. R. (2004). A distributed paral-
lel divide and conquer skeleton. In in proceedings of
PARA’04).
K. Matsuzaki, K. Emoto, H. I. Z. H. (2006). A library of
constructive skeletons for sequential style of parallel
programming. In in proceedings of 1st international
Conference on Scalable Information Systems (INFOS-
CALE).
Kuchen, H. (2002). A skeleton library. In Euro-Par’02.
LNCS 2400, 620–629, Springer Verlag.
Kuchen, H. (2004). Optimizing sequences of skeleton
calls. In Domain-Specific Program Generation. LNCS
3016, 254–273, Springer Verlag.
MPI (2008). Message passing interface forum, mpi.
In MPI: A Message-Passing Interface Standard.
http://www.mpi-forum.org/docs/mpi-11-html/mpi-
report.html.
Myricom (2008). The myricom homepage.
http://www.myri.com/.
Pelagatti, S. (2003). Task and data parallelism in p3l. In
Patterns and Skeletons for Parallel and Distributed
Computing. eds. F.A. Rabhi, S. Gorlatch, 155–186,
Springer Verlag.
Poldner, M. and Kuchen, H. (2005). Scalable farms. In in
proceedings of Parallel Computing (ParCo).
Poldner, M. and Kuchen, H. (2006). Algorithmic skeletons
for branch & bound. In in proceedings of 1st Interna-
tional Conference on Software and Data Technology
(ICSOFT), Vol. 1, pages 291-300.
Poldner, M. and Kuchen, H. (2008a). On implementing the
farm skeleton. In Parallel Processing Letters, Vol. 18,
No. 1, pages 117-131.
Poldner, M. and Kuchen, H. (2008b). Skeletons for di-
vide and conquer algorithms. In Proceedings of the
IASTED International Conference on Parallel and
Distributed Computing and Networks (PDCN). ACTA
Press.
Strassen, V. (1969). Gaussian elimination is not optimal. In
Numerische Mathematik, 13:354-356.
T.C. Hu, M. S. (1982). Computation of matrix chain prod-
ucts i. In SIAM Journal on Computing, 11(2):362-373.
T.C. Hu, M. S. (1984). Computation of matrix chain prod-
ucts ii. In SIAM Journal on Computing, 13(2):228-
251.
Y. Bai, R. W. (2007). A parallel symmetric block-
tridiagonal divide-and-conquer algorithm. In ACM
Transactions on Mathematical Software, Vol. 33, No.
4, Article 25.
ZIV (2008). Ziv-cluster. http://zivcluster.uni-muenster.de/.
OPTIMIZING SKELETAL STREAM PROCESSING FOR DIVIDE AND CONQUER
189
