
ALGORITHMS FOR ESTIMATING FOREST INVENTORY
PARAMETERS FROM DATA ACQUIRED BY REMOTE
SENSING METHODS
Ingus Smits and Salvis Dagis
Faculty of Information Technologies, Latvia University of Agriculture, Liela Street 2, Jelgava, Latvia
Keywords: Image processing, data mining, segmentation, forest inventory, LiDAR, aero photography.
Abstract: Two technologies- LiDAR (Light Detection and Ranging) and aero photography- have a huge potential in
forest taxation, which is a process of gathering different parameters of specific region. Both technologies
can be used for finding different parameters of interest, such as number of trees, tree height and other. This
paper presents the results of usage analysis for LiDAR and aero photography, and describes their
possibilities. Also it contains an analysis of tree identifying algorithms and describes ways of their usage in
different processes.
1 INTRODUCTION
Taxation process is very important for performing
forest management planning activities, especially
because its performance frequency and prerequisites
are defined by law. Unfortunately, methods that are
available today require a lot of time and funds.
To reduce the usage of resources, new methods must
be developed or some existing ones must be adopted
from different fields. Two appropriate candidates,
which already have application for data collection in
other fields, are described in this article. Those
technologies are aero photography and Light
Detection and Ranging (LiDAR)
(Lim et al. 2003).
Using them to acquire taxation parameters is not a
simple task which options must be analyzed.
In both cases the main task is not to deal with the
problems of technical type (technology is already
being used in other fields and is also adaptable for
this one). The main problem is to interpret the result
data appropriately – to find out taxation parameters
of different regions using information which is
gathered by aero photography or LiDAR
technologies. In this article use cases and potentials
of both methods are analyzed and algorithms for tree
identification are described.
2 PROCESS OF TAXATION
The aim of forest taxation and accounting
corresponding data is to gather geodetic materials
and overall information about woods that is under
jurisdiction of some managers or owners. Data about
territories is collected using geodetic methods and
aero photography materials (
Sile 2006). There are
two types of taxation: precise (every tree is
measured using special tools – a very expensive and
time consuming process) and group evaluation (in
defined region average parameters are measured for
each kind of tree)
(Dagis 2006). In practice precise
taxation is used only to calculate value of property
before performing the main timber cutting process.
Different situation is with group evaluation which
must be performed once in every ten years as it is
defined by law. This taxation type is used mostly for
informative reasons - to find out exact situation on
given property and to decide what economical
activities must be performed there (Dagis, 2007).
Precise evolution of forest region from group data is
almost impossible. Methods that allow to execute
this task exist (Ozolins, 2004; Ozolins, 2006; Dagis
et al. 2006), but they only give approximate results
(Smits, Dagis, 2007). One of the biggest needs for
forest owners and some republic services is to
improve taxation process in the way that it becomes
faster and cheaper so the management planning and
all economical activities would consume less
resources (Oss, 2006).
583
Smits I. and Dagis S. (2008).
ALGORITHMS FOR ESTIMATING FOREST INVENTORY PARAMETERS FROM DATA ACQUIRED BY REMOTE SENSING METHODS.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 583-587
DOI: 10.5220/0001720005830587
Copyright
c
SciTePress
3 PROCESS OF MANAGEMENT
Planning is the most complicated task that is
performed in enterprise and it requires very precise
data.
Information that is used for planning must describe
not only existing situation, but also be with high
accuracy and degree of detailed elaboration to serve
as a basis for forecasting evolution possibilities in
defined terms. Every company must have this kind
of data to solve everyday tasks and all their
decisions need to be data based. This statement
applies to all kind of enterprises and especially in the
field of forestry where data acquisition is called
taxation. Of course company can have a lot of
different information sources which must be taken
into account, but taxation data that describes real
time quantitative parameters of forest is the most
important one.
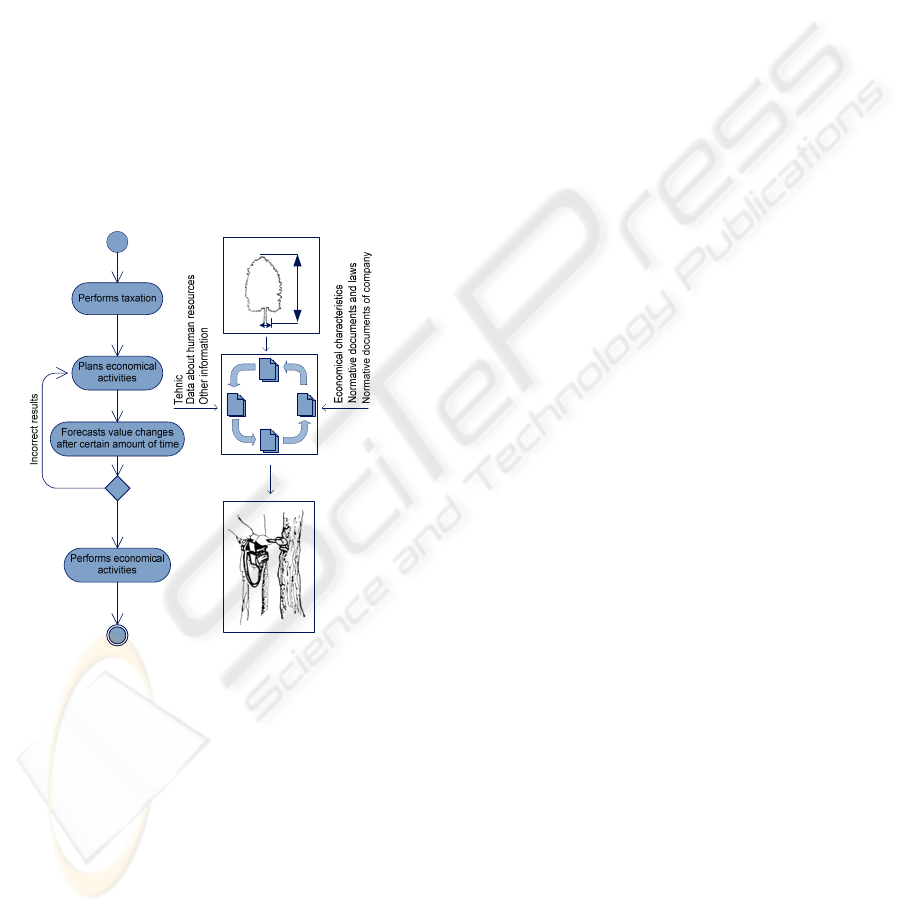
Figure 1: Data acquisition in management process.
Figure 1 shows the process of planning economical
activities that must be performed in forest. The main
part of the diagram is a loop in which potential result
is evaluated by considering how it will change after
certain economical tasks are performed. These
activities are executed as many times as needed to
find some politically correct result. Before the
beginning of searching process real taxation are
preformed and data that describes the existing
situation are gathered. Planning tasks are being done
by using this information and some peripheral data -
normative documents, laws, and descriptions about
availability of resources.
4 REMOTE SENSING METHODS
Data gathering is the main task of taxation process
and to complete it specially educated people must go
to forest and find out information that describes
some regions. Performance procedure and time
schedules of this process are described by law.
Unfortunately, traditional way of doing it is
expensive and time consuming – a specialist with
adequate knowledge to create sampling plot and
measure its characteristics must visit every territory
of interest. Costs of this work scenario can be found
as sum of: specialist education, time and travel price
and expenses of measuring process. Traditional
taxation is not only ineffective in terms of time, but
it also gives only very local information that must be
generalized by specific mathematical methods.
These calculations are related with certain growth of
data error which can be statistically evaluated.
Methods that are not so local and describe much
larger territories consuming less time (and also
reducing the main source of mistakes – human
factor) must be created. In the next chapters of this
article two technologies (aero photography and
LiDAR) for data acquisition that can describe very
large regions will be overlooked. Both methods have
big potential and are being examined by specialists
in different countries and science fields. The task
that should be solved in nearest times to enable full
scale usage of these methods is data processing to
convert them into form which is understandable to
information systems. Transforming information that
is gathered either by aero photography or LiDAR is
not a trivial task, because complicated algorithms
that help to find informative relationships in data are
needed. Also to use both of mentioned technologies
and to find out specific characteristics of different
regions precise GIS coordinates of each point must
be available.
4.1 Use Cases of Aero Photography
Aero photography is an image that is taken from
airplane flying at certain height. It allows acquiring
data that describes earth surface and all objects that
is located on it. The quality of pictures and possible
use cases are closely related to the height and
stability of a flight. An image acquiring by using
pilotless technologies has become very popular in
the most recent periods of time, because of its small
expense and simplicity of usage.
An aero photograph that describes different
territories has been used for many years and the
ICEIS 2008 - International Conference on Enterprise Information Systems
584

main field of interest for it was cartography. Many
well known geographic information systems are
equipped with algorithms that allow creating a photo
layer to display them on a map.
The most important feature of such photography is
that the objects shown on it are attached to their
location by coordinates of the real world. With the
improvement of technologies and rise of calculation
powers of computer systems new usage possibilities
for these images have appeared, for example
evaluation of specific objects.
Using algorithms for object recognition in images
can be performed in three modes – automatic, half
automatics and manual. Each of the mentioned
modes has well known precondition – photo quality
which can be described by many components such
as color, contrast, graininess, the amount of objects
and others. The relationship between quality and
automation level can be stated – for higher quality
higher automation level can be used.
Acquiring useful image is not a trivial task, because
many factors such as weather, time of the year,
quality of equipment must be taken into account.
Also height of flight is very important and can be
altered depending on the goals of photography. For
example, if the main task is to get the density of
trees in some region then the height can be
comparatively big, but if it is necessary to find the
size of leafage or even a kind of a tree, the height
must be small. In the first situation the main benefit
can be found in the fact that for describing some
region a smaller number of photos can be taken then
in the second situation. A specific task can be solved
only when all needed data is acquired for the
territory of interest.
Aero photography has many use cases, but for
taxation the most important ones are:
1. Finding the number and coordinates of a
tree;
2. Finding the size of a leafage ;
3. Finding the kind of a tree;
4. Finding the borderlines of a territory;
5. Finding forest vistas and roads;
6. Evaluating territories gutted by fire;
7. Evaluating windfalls.
Image processing algorithms are needed for solving
all of the mentioned tasks. The first, the fourth, and
the fifth tasks need photos with the smallest
resolution. All other tasks need qualitative pictures
which contain plenty of data to use methods that can
separate tree leafage and measure its parameters. For
all of the pictures widely known algorithms or
simple each pixel overlooking loops can be used. In
this situation a very popular group of segmentation
an algorithm that needs to know a number of clusters
cannot be utilized because it is the parameter that the
system is looking for.
If the system finds specific segments by using these
methods, then by knowing the height of a flight and
the angle of a camera, the size of leafage can be
calculated.
For tree kind determination it is necessary to
recognize the structure of an object, were at a certain
scale contours of a leaf which is taken from the
image and searched in the previously defined
collection. Another way of solving this task is by
using colored recognition (each tree kind has its
specific color). The main drawback of this method is
that the color depends on weather and photo filters
used in the picture making. It means that automatic
use of this method is almost impossible.
4.2 Tree Identification using Aero
Photography
Crating automatic methods is a very difficult task
and the first step in it is to understand half automatic
or even manual solutions. We will describe an
algorithm for identifying a tree that works in a half
automatic mode. For this method images attached to
GIS coordinates are needed and also a full photo
cannot be used, but only a part of it where the angle
of photography and surface is close to 90
o
, because
in other case it is a side-view. So the images must
overlap and cover some part of the same territory.
Tops of a tree on the images usually can be well
separated from the background and their color
depends on the time of the year and weather.
Therefore to realize half automatic way of
recognition it is necessary to select a few pixels from
tree tops (2 to 5). Every shown point gives us
information of the possible color and by adding
some dispersion to it (recommended 5-15%) we
define a pattern to look for in the rest of a picture.
Dispersion and location of points are parameters that
user can change depending on results. Minimal
(R
min
) and maximal (R
max
) radius is given in
numbers and by using them in combination with tree
top color dispersion, searching for a particular tree
can be preformed.
Algorithm for finding tree center works with one
correction (Fig. 2) – searching is performed on X
and Y scales by using colors. First of all, tree top
start point x
1
and end point x
2
have to be found, then
an average value x
0
is calculated x
0
= (x
2
+x
1
)/2. From
the point x
0
on Y scale minimal y
1
and maximal y
2
values are found. In the same way as x
0
the value of
y
0
is calculated y
0
= (y
2
+y
1
)/2.
ALGORITHMS FOR ESTIMATING FOREST INVENTORY PARAMETERS FROM DATA ACQUIRED BY REMOTE
SENSING METHODS
585
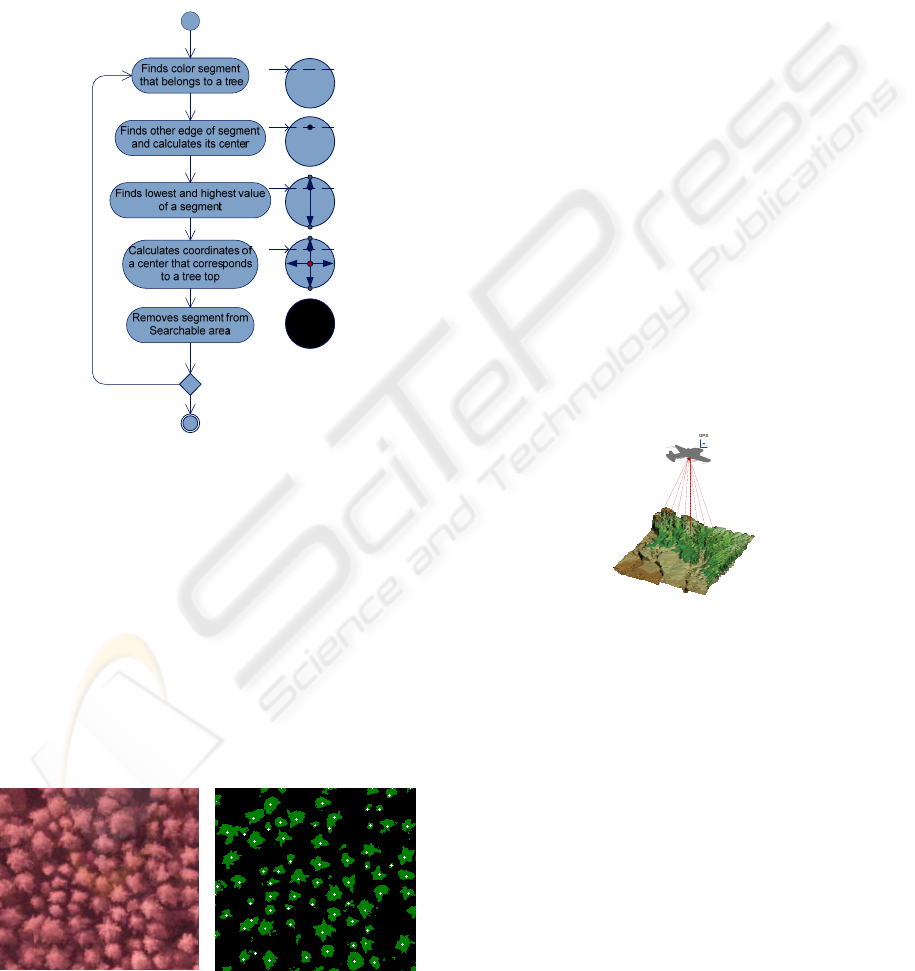
The center of a tree top is found by correcting x
values corresponding to the newly found y
0
value.
Using center coordinates every point that is located
at a distance of radius R
tree
=min(R
max
,R
lefage
) is
considered to belong to a single tree. After writing
necessary data into result collection newly found
tree top is removed from the searching region. After
that new searching iterations are being performed
while group of points where R
lefage
>R
min
can be
found.
Figure 2: Activities of finding tree top center in aero
photography.
By utilizing described method every tree center in a
photo is found. Using GIS coordinates’ a real
location of a tree on 2D plane can be calculated and
later utilized for taxation data concretization with
different methods. From discovered points the
number of trees per hectare can be found. And also
by using leafage diameter and tree height the
relationships between an approximate diameter and
the density of a tree trunk can be calculated. For the
precise taxation these results must be improved with
a data from different methods.
Figure 3: Photo before and after using tree recognition
algorithm.
Identifying a tree on a photography using automatic
mode is a very complicated task. It has a lot of
preconditions for data gathering technologies and
processing algorithms. Two tasks that must be
solved to realize fully automatic tree recognition are:
1. Acquisition of qualitative picture where all
necessary attributive data is saved together with
the image (for example previously mentioned
tree top point colors);
2. Use of universal algorithms that regardless on
different picture parameters can find number of
segments and filter needless data.
5 USAGE OF LiDAR IN
TAXATION
LiDAR is a new theology that is being used to
acquire information about earth relief and objects
located on it in three dimensional plans
(Lim et al.
2003)
. It is done by using special laser and light
registering device. The main principle of this
method is the same as in the case of radar – the time
in which emitted signal returns to the source is being
measured. The only difference from simple radar is
that instead of radio signal laser light is used.
LiDAR technology is used in many fields and some
of them are: archeology, geography, geology and
remote sensing.
Figure 4: LiDAR data acquisition.
LiDAR measurements are performed by using
airplane that is equipped with a device of global
positioning and laser scanner device that during a
flight perpendicularly to its direction (Fig. 4)
measure light reflection points. Mistakes of data that
rise depending on scanner angle and flight stability
are eliminated in the process of measurement.
By visualization of gathered points three
dimensional model of a tree (or any other object),
that describes its characteristics can be created.
These models can be analyzed with aim of finding
some special parameters of an individual tree or
even of all sampling plot. Usage of this method in
taxation process still is an object of research and it is
necessary to clarify its qualitative and quantitative
parameters – costs, preciseness of measurements and
how it works in different kinds of forests.
ICEIS 2008 - International Conference on Enterprise Information Systems
586

Tree counting using LiDAR data can be done
similarly to aero photo. the difference is that in
photography the color was analyzed for each pixel,
but in LiDAR data 3D coordinates of each point
must be examined.
Figure 5: Tree identification by using LiDAR data.
For identifying a single tree or finding an overall
number simple algorithm that analyze picture by
dividing it into small regions can be used. The
highest point in each field is calculated and it is
assumed to be the top point of the highest tree (Fig.
5). Around this point using defined radius
segmentation can be performed to define all points
that belong only to a single tree. Afterwards all
located segments are removed from data collection
and new search for the highest point started. Tests
show that this simple algorithm works well in a
forest with not very high density and only one floor
of trees.
6 CONCLUSIONS
Aero photography and LiDAR data can be used for
finding a number of trees and its coordinates.
Identifying a kind of a tree is a task that doesn’t have
one universal solution and research of its
possibilities must be continued.
The main benefit from using LiDAR technology is
that from its data tree height can easy be found,
because every point is described in three
dimensions.
The biggest drawback for both methods is that there
is no direct way of finding the most important
taxation parameter – diameter of a tree.
Using both of described technologies together in the
same region can raise their efficiency.
Data processing can be performed in three modes –
automatic, half automatic or manual. For realization
of automatic mode it is necessary to create not only
adequate data processing algorithms, but also it
requires certain methodology of data gathering.
ACKNOWLEDGEMENTS
Authors wish to thank EU funded project “Support
for realization of doctoral program and after doctoral
researches” and “Forest development fund” for their
support of this synthesis.
REFERENCES
Dagis S., Arhipovs S., 2006, “The Static Model of Latvian
Forest Management Planning and Capital Value
Estimating”, Proceedings, “8th International
Conference on Enterprise Information Systems”,
Cyprus, Paphos.
Dagis S., Arhipovs S., Dubrovskis D., 2006, “The Growth
of Trees Motion Mathematical Models and Their
Adaptation the Latvia Circumstances”, Lithuania,
Kauno.
Dagis S., 2007, „Information System Requirement
Analysis And Specification in Forest Management
Planning Process”, 9th International Conference on
Enterprise Information Systems, Funchal, Madeira –
Portugal.
Ozolins R. 2004, “Tree Trunk Distribution by the
Diameter Class”. Proceedings of the 5 international
conference – Latvian academy of pedagogy.
Ozolins R. 2002, “Forest Stand Assortment Structure
Analysis Using Mathematical Modelling”. Forest
structure and growth – Tartu, – (Forestry studies
XXXVII) p. 33-42.
Inita Sile, Sergejs Arhipovs, 2006 ,“The Development of
The Precedent Model For the Latvia Forest
Management Planning Processes”, Proceedings, “8th
International Conference on Enterprise Information
Systems”, Cyprus, Paphos.
Janis Oss, 2006, "The Model of Wood Resource Flow",
Proceedings, "The 2006 European Simulation and
Modeling conference", Toulouse, France.
Lim, K., Treitz, P., Wulder, M., St-Onge, B. and Flood,
M. 2003. LiDAR remote sensing of forest structure.
Prog. Phys. Geog. 27:88-106.
Smits Ingus, Arhipovs Sergejs, 2006, “The Usage of Palm
Top Computer in Forest Inventory”. International
scientific conference Biometrics and Information
Technologies in Agriculture: Research and
Development, Kaunas, Lithuania.
Smits Ingus, Salvis Dagis, 2007, “Tasks and Data
Precision Problem in Forest Management Planning
Information System”,"The 2007 European Simulation
and Modeling conference", Porto, Portugal.
ALGORITHMS FOR ESTIMATING FOREST INVENTORY PARAMETERS FROM DATA ACQUIRED BY REMOTE
SENSING METHODS
587
