
ASSESSMENT OF THE EFFECT OF NOISE ON AN UNSUPERVISED
FEATURE SELECTION METHOD FOR GENERATIVE
TOPOGRAPHIC MAPPING
Alfredo Vellido and Jorge S. Velazco
Department of Computing Languages and Systems (LSI), Technical University of Catalonia (UPC), Barcelona, Spain
Keywords:
Unsupervised Feature Selection, Feature Relevance Determination, Generative Topographic Mapping, clus-
tering, uninformative noise.
Abstract:
Unsupervised feature relevance determination and feature selection for dimensionality reduction are important
issues in many clustering problems. An unsupervised feature selection method for general Finite Mixture
Models was recently proposed and subsequently extended to Generative Topographic Mapping (GTM), a
nonlinear manifold learning constrained mixture model for data clustering and visualization. Some of the
results of a previous preliminary assessment of this method for GTM suggested that its performance may be
affected by the presence of uninformative noise in the dataset. In this brief study, we test in some detail such
limitation of the method.
1 INTRODUCTION
Statistical Machine Learning (SML) provides a uni-
fied principled framework for machine learning meth-
ods and helps to overcome some of their limitations.
Embedding probability theory into machine learning
techniques has important modeling implications. For
instance, it requires modeling assumptions, includ-
ing the specification of prior distributions, to be made
explicit; it also automatically satisfies the likelihood
principle and provides a natural framework to handle
uncertainty.
An example of SML can be found in Finite Mix-
ture Models (FMM), which are flexible and robust
methods for multivariate data clustering (McLachlan
and Peel, 1998). The addition of visualization capa-
bilities would benefit these models in many applica-
tion scenarios, helping to provide intuitive cues about
data structural patterns. One way to endowFMM with
data visualization is by constraining the mixture com-
ponents to be centered in a low-dimensional manifold
embedded into the multivariate data space, as in Gen-
erative Topographic Mapping (GTM) (Bishop et al.,
1999). This is a non-linear, neural network-inspired
manifold learning model for simultaneous data clus-
tering and visualization.
The interpretability of the clustering results pro-
vided by GTM becomes difficult when the analyzed
data sets consist of a large number of features. This
limitation can be overcome with methods to estimate
the ranking of the data features according to their rel-
ative relevance, leading to feature selection (FS). The
research on unsupervised FS is scarce in comparison
to that for supervised models, despite the fact that FS
becomes a paramount issue in many clustering prob-
lems. A description of the problem in terms of a re-
duced subset of relevant features would improve the
interpretability of the clusters obtained by unsuper-
vised methods.
An important advance on unsupervised FS for Fi-
nite Mixture Models was presented in (Law et al.,
2004) and recently extended to GTM (the FRD-GTM
model) in (Vellido et al., 2006) and to one of its vari-
ants for time series analysis (FRD-GTM-TT) in (Olier
and Vellido, 2006). This method was preliminarily
assessed in (Vellido, 2006), where some of the re-
sults suggested that the performance of the method
may be degraded by the presence of uninformative
noise, which would obscure the underlying cluster
structure of the data and, therefore, mislead an unsu-
pervised feature relevance estimation method. In this
brief study, we provide evidence of the limitations of
the method through controlled experiments using syn-
thetic data.
The remaining of the paper is organized as fol-
lows. First, brief introductions to the standard Gaus-
sian GTM and its extensionfor Feature Relevance De-
termination (FRD) are provided in section 2. This is
424
Vellido A. and S. Velazco J. (2008).
ASSESSMENT OF THE EFFECT OF NOISE ON AN UNSUPERVISED FEATURE SELECTION METHOD FOR GENERATIVE TOPOGRAPHIC
MAPPING.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 424-430
DOI: 10.5220/0001681204240430
Copyright
c
SciTePress

followed, in section 3, by a description of the exper-
imental settings and, in section 4, by a presentation
and discussion of the results. The paper closes with a
brief summary of conclusions.
2 FEATURE RELEVANCE
DETERMINATION FOR GTM
2.1 The Standard GTM Model
The neural network-inspired GTM is a manifold
learning model with sound foundations in probabil-
ity theory. It performs simultaneous clustering and
visualization of the observed data through a nonlin-
ear and topology-preserving mapping from a visual-
ization latent space in ℜ
L
(with L being usually 1
or 2 for visualization purposes) onto a manifold em-
bedded in the ℜ
D
space, where the observed data re-
side. For each feature d, the functional form of this
mapping is the generalized linear regression model
y
d
(u,W) =
∑
M
m
φ
m
(u)w
md
, where φ
m
is one of M ba-
sis functions, defined here as spherically symmetric
Gaussians, generating the non-linear mapping from a
latent vector u to the manifold in ℜ
D
. The matrix W
of adaptive weights w
md
explicitely defines this map-
ping.
The prior distribution of u in latent space is con-
strained to form a uniform discrete grid of K centres.
A density model in data space is therefore generated
for each componentk of the mixture, which, assuming
that the observed data set X is constituted by N inde-
pendent, identically distributed (i.i.d.) data points x
n
,
leads to the definition of a complete log-likelihood in
the form:
L(W,β|X)=
∑
N
n=1
ln
1
K
∑
K
k=1
β
2π
D/2
exp
{
−β/2ky
k
−x
n
k
2
}
(1)
where y
k
is a reference or prototype vector consisting
of elements (y
dk
=
∑
M
m
φ
m
(u
k
)w
md
), which are an in-
stantiation of the generalized linear regression model
described above. From Eq. (1), the adaptive param-
eters of the model, which are W and the common
inverse variance of the Gaussian components, β, can
be optimized by maximum likelihood (ML) using the
Expectation-Maximization (EM) algorithm. Details
can be found in (Bishop et al., 1999).
2.2 The FRD-GTM
In this paper, unsupervised feature relevance is under-
stood as the likelihood of a feature being responsible
for generating the data cluster structure. Therefore,
relevant features will be those which better separate
the natural clusters in which the data are structured.
Moreover, we are interested in unsupervised feature
selection methods that are suitable for clustering mod-
els that also provide data visualization. With that in
mind, the FRD technique was defined for the GTM
model in (Vellido et al., 2006). For the unsupervised
GTM clustering model, relevance is defined through
the concept of saliency.
The FRD problem was investigated for GTM in
(Vellido et al., 2006). Feature relevance in this unsu-
pervised setting is understood as the likelihood of a
feature being responsible for generating the data clus-
ter structure and it is quantified through the concept
of saliency. Formally, the saliency of feature d can
be defined as ρ
d
= P(η
d
= 1), where η=(η
1
,... ,η
D
)
is a set of binary indicators that can be integrated in
the EM algorithm as missing variables. A value of
η
d
= 1 (ρ
d
= 1) indicates that feature d has the maxi-
mum possible relevance. According to this definition,
the FRD-GTM mixture density can be written as:
p(x|W,β,w
0
,β
0
,ρ)=
∑
K
k=1
1
K
∏
D
d=1
{
ρ
d
p(x
d
|u
k
;w
d
,β)+(1−ρ
d
)q
(
x
d
|u
0
;w
0,d
,β
0,d
)}
(2)
where w
d
is the vector of W corresponding to fea-
ture d and ρ ≡ {ρ
1
,... ,ρ
D
}. A feature d will be
considered irrelevant, with irrelevance (1 −ρ
d
), if
p(x
d
|u
k
;w
d
,β) = q(x
d
|u
0
;w
0,d
,β
0,d
) for all the mix-
ture components k, where q is a common density
followed by feature d. Notice that this is like say-
ing that the distribution for feature d does not fol-
low the cluster structure defined by the model. This
common component requires the definition of two ex-
tra adaptive parameters: w
0
≡ {w
0
,1,.. .,w
0,D
} and
β
0
≡ {β
0,1
,... ,β
0,D
} (so that y
0
= φ
0
(u
0
)w
0
). For
fully relevant (ρ
d
→ 1) features, the common compo-
nent variance vanishes:(β
0,d
)
−1
→ 0. The parameters
of the model can, once again, be optimized by ML
using the EM algorithm. Detailed calculations can be
found in (Vellido, 2005).
3 EXPERIMENTAL SETTINGS
The results of statistically principled models for prob-
ability density estimation, such as GTM and its vari-
ants, are bound to be affected, in one way or another,
by the presence of uninformative noise in the data.
Here, we assess such effects on the FRD-GTM model
described in the previous section. For that, data with
very specific characteristics are required. We use syn-
thetic sets similar to those in (Law et al., 2004) for
comparative purposes.
ASSESSMENT OF THE EFFECT OF NOISE ON AN UNSUPERVISED FEATURE SELECTION METHOD FOR
GENERATIVE TOPOGRAPHIC MAPPING
425

The first synthetic set (hereafter referred to as
synth1) is a variation on the Trunk data set used in
(Law et al., 2004)), and was designed for its 10 fea-
tures to be in decreasing order of relevance. It con-
sists of data sampled from two Gaussians N (µ
1
,I) and
N (µ
2
,I), where
µ
1
= 1,
1
√
3
,... ,
1
√
2d−1
,... ,
1
√
19
and µ
1
= −µ
2
. We hypothesize (H1) that the feature
relevance ranking estimated by FRD-GTM for these
data will deteriorate gradually as noise is added to the
10 original features and in proportion to its level. In
order to test H1, four increasing levels of Gaussian
noise, of standard deviations 0.1, 0.2, 0.5, and 1, were
added to the 10 original features of synth1, for a given
sample size. It is also hypothesized (H2) that the fea-
ture relevance ranking will deteriorate as we add new
noisy features and in proportion to their level of noise.
In order to test H2, 5 and 10 dummy features consist-
ing of Gaussian noise of standard deviations 0.1, 0.2,
0.5, and 1, were, in turn, added to the 10 original fea-
tures.
The second dataset (hereafter referred to as
synth2) consists of two features defining four neatly
separated Gaussian clusters with centres located at
(0,3),(1, 9),(6,4) and (7, 10); they are meant to be
relatively relevant in contrast to any added noise. In
a first experiment, noise of different levels was added
to the first two features, while 4 extra noise features
were added to those two. Several other experiments,
similar to the ones devised for synth1 were designed
to further test H2.
The FRD-GTM parameters W and w
0
were ini-
tialized with small random values sampled from a
normal distribution. Saliencies were initialized at
ρ
d
= 0.5,∀d,d = 1,. . .,D. The grid of GTM latent
centres was fixed to a square layout of 3 ×3 nodes
(i.e., 9 constrained mixture components). The cor-
responding grid of basis functions φ
m
was fixed to a
2×2 layout.
4 EXPERIMENTAL RESULTS
AND DISCUSSION
The experiments outlined in the previous section aim
to assess the effect of the presence of uninformative
noise on the performance of FRD-GTM in the process
of unsupervised feature relevance estimation.
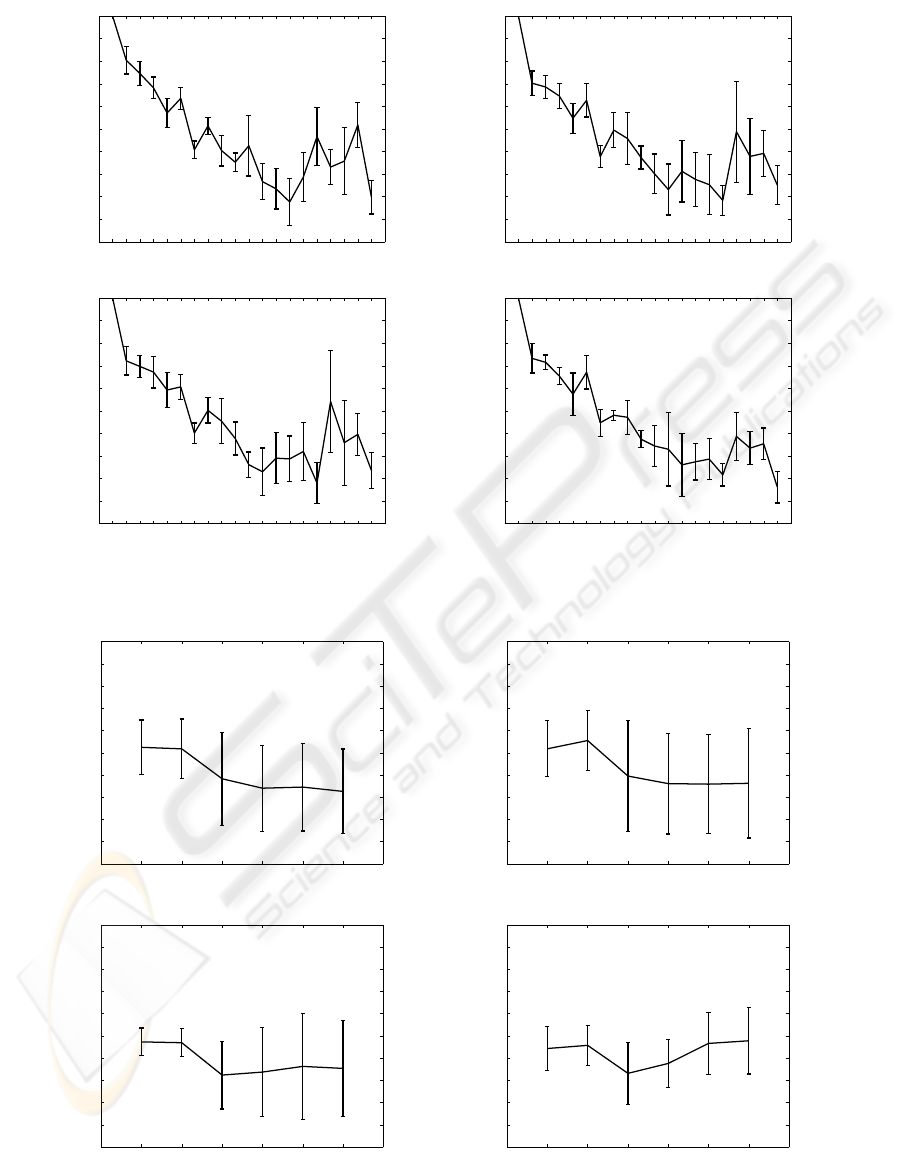
In the experiments reported in Figure 1, four lev-
els of Gaussian noise of increasing level were added
to a sample of 1,000 points of synth1. The FRD-GTM
is shown to behave robustly even in the presence of a
substantial amount of noise, although its performance
deteriorates significantly for noise of standard devi-
ation = 1, as reflected in the breach of the expected
monotonic decrease of the mean feature saliencies. It
is also true that, comparing these results with those in
Figure 2 (in which no noise was added to synth1), the
most relevant feature is not so close to a saliency of 1.
H1 is, therefore, partially supported by these results.
The FRD ranking results for the second experi-
ment, using the 10 original features of synth1 plus 5
Gaussian noise features, are shown in Figure 2. For
all levels of noise, the relevance (in the form of esti-
mated saliency) of the original features (1 → 10) is
reasonably well estimated: the saliency for the first
feature is close to 1 with almost full certainty (very
small vertical bars) and, overall, the expected mono-
tonic decrease of the mean feature saliencies is pre-
served, although breaches of such monotonicity can
also be observed. The saliencies estimated for the 5
added Gaussian noise features are regularly estimated
to be small. Interestingly, the increase in the level of
noise does not seem to affect the performance of the
FRD method in any significant way: the differences
between the saliencies of the 10 original variables and
the 5 noisy ones stay roughly the same and the de-
creasing relevance for the 10 original variables does
not vary substantially. According to these results, H2
is not supported at this stage.
The FRD ranking results for the third experiment,
using the 10 original features of synth1 plus 10 Gaus-
sian noise features are shown in Figure 3. Once again,
and for all levels of noise, the relevance of the 10 orig-
inal features shows, overall, the expected monotonic
decrease of the mean feature saliencies, with some
breaches of monotonicity. This time, the saliencies
estimated for the 10 added Gaussian noise features
are not that clearly small in comparison to those esti-
mated for the 10 original ones. In summary, the de-
creasing relevance for the 10 original variables does
not vary substantially, and the differences between
the saliencies of the 10 original features and the 5
noisy ones stay roughly the same regardless the noise
level. Nevertheless, the FRD method seems to be af-
fected by the increase in number of the noisy features.
According to these results, H2 is only partially sup-
ported.
The FRD-GTM is shown to behave with reason-
able robustness when noise is added to the first two
features of synth2, as shown in Figure 4. As in the
case of synth1, its performance deteriorates signifi-
cantly for high levels of noise. Comparing these re-
sults with those in Figures 5 and 6 (in which no noise
was added to the first two features), the overall dete-
rioration becomes evident. H1 is again partially sup-
ported by these results.
The FRD ranking results for the experiments us-
ICEIS 2008 - International Conference on Enterprise Information Systems
426

ing the 2 original features of synth2 plus either 7 or 10
Gaussian noise features are shown, in turn, in Figures
5 and 6. This is clearly a far easier problem for the
FRD method. Regardless the level of noise and the
number of added noisy features, FRD-GTM consis-
tently estimates the first 2 features to be the most rele-
vant. Furthermore, the differences between the salien-
cies estimated for the first 2 features and the added
(7 or 10) noisy ones stay roughly the same. In con-
trast with the results obtained in the experiments with
synth1, the estimated saliencies for all noisy features
are low and quite similar. Our research hypothesis H2
is not supported by these results.
5 CONCLUSIONS
In this paper, the effects of the presence of noise on a
method of unsupervised feature relevance determina-
tion for the manifold learning GTM model, have been
investigated in some detail.
The FRD-GTM has been shown to behave with
reasonable robustness even in the presence of a fair
amount of noise. It was first hypothesized that the
feature relevance ranking would deteriorate as we add
noise to the existing features and in proportion to the
level of that noise. This hypothesis has found only
limited experimental support. It was also hypothe-
sized that the feature relevance ranking would dete-
riorate as we add extra noisy features to the existing
ones and in proportion to their number and the level
of noise. This second hypothesis has found little ex-
perimental support: There is only some evidence that
the performance of the FRD method deteriorates as
we increase the number of purely noisy features and
only if the dataset is complex enough.
This relative weakness of the method in the pres-
ence of noise makes it convenient to consider possi-
ble strategies for model regularization and, therefore,
future research will be devoted the design of meth-
ods for automatic and proactive model regularization
to prevent or at least limit the negative effect of data
overfitting on the FRD method for GTM. Some of
such methods havealready been designed for the stan-
dard GTM formulation (Bishop et al., 1998; Vellido
et al., 2003) and could be extended to FRD-GTM.
Alternatively, regularization could be accomplished
through a reformulation of the GTM within a varia-
tional Bayesian theoretical framework (Olier and Vel-
lido, 2008). Again, this could be extended to accomo-
date FRD.
Future research should extend the experimental
design to include a wider variety of artificial data sets
of different characteristics. It should also address the
design of strategies for adaptive model regularization
for FRD-GTM. Such kind of strategy would automat-
ically regulate the level of map smoothing necessary
to avoid the model fitting the noise in the data, i.e.
data overfitting.
ACKNOWLEDGEMENTS
Alfredo Vellido is a researcher within the Ram´on y
Cajal program of the Spanish Ministry of Education
and Science (MEC) and acknowledges funding from
the MEC I+D project TIN2006-08114.
REFERENCES
Bishop, C., Svens´en, M., and Williams, C. (1998). Devel-
opments of the generative topographic mapping. In
Neurocomputing. 21(1-3), pp. 203-224.
Bishop, C., Svens´en, M., and Williams, C. (1999). Gtm:
The generative topographic mapping. In Neural Com-
putation. 10(1), pp. 215–234.
Law, M., Figueiredo, M., and Jain, A. (2004). Simultaneous
feature selection and clustering using mixture models.
In IEEE T. Pattern Anal. 26(9), pp. 1154–1166.
McLachlan, G. and Peel, D. (1998). Finite mixture models.
John Wiley-Sons, New York.
Olier, I. and Vellido, A. (2006). Time series relevance
determination through a topology-constrained hidden
markov model. In Proc. of the 7th International Con-
ference on Intelligent Data Engineering and Auto-
mated Learning (IDEAL 2006). LNCS 4224, 40-47.
Burgos, Spain.
Olier, I. and Vellido, A. (2008). On the benefits for model
regularization of a variational formulation of gtm. In
in Proceedings of the International Joint Conference
on Neural Networks (IJCNN 2008). in press.
Vellido, A. (2005). Preliminary theoretical results on a fea-
ture relevance determination method for generative to-
pographic mapping. In Technical Report LSI-05-13-
R. Universitat Politecnica de Catalunya, Barcelona,
Spain.
Vellido, A. (2006). Assessment of an unsupervised feature
selection method for generative topographic mapping.
In 16th International Conference on Artificial Neural
Networks. LNCS 4132, 361-370. Athens, Greece.
Vellido, A., El-Deredy, W., and Lisboa, P. (2003). Selective
smoothing of the generative topographic mapping. In
IEEE T. Neural Network. 14(4), pp. 847-852.
Vellido, A., Lisboa, P., and Vicente, D. (2006). Robust anal-
ysis of mrs brain tumour data using t-gtm. In Neuro-
computing. 69(7–9), pp. 754–768, 2006.
ASSESSMENT OF THE EFFECT OF NOISE ON AN UNSUPERVISED FEATURE SELECTION METHOD FOR
GENERATIVE TOPOGRAPHIC MAPPING
427

1 2 3 4 5 6 7 8 9 10 11
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 0.1
1 2 3 4 5 6 7 8 9 10 11
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 0.2
1 2 3 4 5 6 7 8 9 10 11
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 0.5
1 2 3 4 5 6 7 8 9 10 11
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 1
Figure 1: Experiments with a sample of 1,000 points from synth1, to which different levels of Gaussian noise (indicated in the
plot titles) were added to the existing features. Mean saliencies ρ
d
for the 10 features. The bars span from the mean minus to
the mean plus one standard deviation of the saliencies over 20 runs of the algorithm.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
5 new features − Std. dev = 0.1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
5 new features − Std. dev = 0.2
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
5 new features − Std. dev = 0.5
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
5 new features − Std. dev = 1
Figure 2: Experiments with a sample of 1,000 points from synth1, to which 5 extra noise features (11 →15) of different noise
levels (indicated in the plot titles) were added. Representation as in Figure 1.
ICEIS 2008 - International Conference on Enterprise Information Systems
428
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
10 new features − Std. dev = 0.1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
10 new features − Std. dev = 0.2
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
10 new features − Std. dev = 0.5
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
10 new features − Std. dev = 1
Figure 3: Experiments with a sample of 1,000 points from synth1, to which 10 extra noise features (11 → 20) of different
noise levels (indicated in the plot titles) were added. Representation as in Figure 1.
1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 0.1
1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 0.2
1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 0.5
1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
Std. dev = 1
Figure 4: Experiments with a sample of 1,000 points from synth2, to which noise of different levels (indicated in the plot
titles) were added. Four extra noise features (3 → 6) of the same noise levels were added. Representation as in previous
figures.
ASSESSMENT OF THE EFFECT OF NOISE ON AN UNSUPERVISED FEATURE SELECTION METHOD FOR
GENERATIVE TOPOGRAPHIC MAPPING
429

1 2 3 4 5 6 7 8 9
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
3 new features − Std. dev = 0.1
1 2 3 4 5 6 7 8 9
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
3 new features − Std. dev = 0.2
1 2 3 4 5 6 7 8 9
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
3 new features − Std. dev = 0.5
1 2 3 4 5 6 7 8 9
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
3 new features − Std. dev = 1
Figure 5: Experiments with a sample of 1,000 points from synth2, to which 7 extra noise features (3 →9) of different noise
levels (indicated in the plot titles) were added. Representation as in previous figures.
1 2 3 4 5 6 7 8 9 10 11 12
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
6 new features − Std. dev = 0.1
1 2 3 4 5 6 7 8 9 10 11 12
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
6 new features − Std. dev = 0.2
1 2 3 4 5 6 7 8 9 10 11 12
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
6 new features − Std. dev = 0.5
1 2 3 4 5 6 7 8 9 10 11 12
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Feature #
Saliency
6 new features − Std. dev = 1
Figure 6: Experiments with a sample of 1,000 points from synth2, to which 10 extra noise features (3 →12) of different noise
levels (indicated in the plot titles) were added. Representation as in previous figures.
ICEIS 2008 - International Conference on Enterprise Information Systems
430
