
ROBOT NAVIGATION MODALITIES
Ray Jarvis
Intelligent Robotics Research Centre, Monash University, Australia
Keywords: Navigation, Modalities.
Abstract: Whilst navigation (robotic or otherwise) consists simply of traversing from a starting point to a goal, there
are a plethora of conditions, states of knowledge and functional intentions which dictate how best to execute
this process in a manageable, reliable, safe and efficient way. This position paper addresses the broad issues
of how a continuum of choices from pure manual or teleoperation control through to fully autonomous
operation can be laid out and then selected from, taking into account the variety of factors listed above and
the richness of live sensory data available to describe the operational environment and the location of the
robot vehicle within it.
1 INTRODUCTION
The dominance of ‘Simultaneous Localisation and
Mapping’ (SLAM) (Leonard, 1991) in recent
publications on robot navigation can give the false
impression that this approach is always the best way
of carrying out this task, largely ignoring the fact
that there are very few situations where such an
approach is either necessary or even feasible, given
normal expectations of prior knowledge and
functional/safety requirements.
As a simple counter example, why would one
want to carry out complex SLAM style navigation in
a building for which exact plans are available?
Alternatively, if a rich database concerning the
geometry and appearance of a reasonably static
environment can be constructed off-line with
accuracy and convenience and this need only be
done once, why not just use this 3D colour rendered
map data for continuing robot operations on a day to
day basis ever more? In the other extreme, in highly
complex and dynamic environments with high risk
potentials, such as robotic bushfire fighting
operations, why not navigate a robotic vehicle under
human teleoperation control to allow the full
judgement of human reasoning to apply throughout
whilst the operator is in a safe and comfortable
place?
There are many other examples between the
extremes described above, each requiring its own
appropriate navigation modality. In what follows the
essentials of robot navigation will be described,
various navigational modalities outlined and a
number of case studies presented for illustration
purposes. Discussion and conclusions then follow.
2 ROBOT NAVIGATION
ESSENTIALS
Six sub-system requirements govern the task of
robot navigation:
(a) Localisation (Jarvis, 1993) concerns the
fixing of the position and pose of the robot vehicle
within its working environment, whether by
following the pre-laid lines on the floor, detecting
beacons or interpreting natural landmarks (or
general environmental metrics and/or appearances).
The less preparation required the better but not at the
expense of overall efficiency, accuracy and safety.
The recent tendency is to try and use on-board
acquired sensory data of the operational
environment with minimal purposeful marking up of
it by way of specific signs.
(b) Environmental mapping concerns the
provision or acquisition of data specifying the
occupancy, geometry, topology or essential nature of
the physical operational environment and sometimes
also the identification of relevant objects within it.
Such a map may assist localization but must also
provide the basis for obstacle avoidance and path
planning.
(c) Path planning (Jarvis, 1994) concerns the
determination of efficient collision-free and safe
295
Jarvis R. (2008).
ROBOT NAVIGATION MODALITIES.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 295-300
DOI: 10.5220/0001505202950300
Copyright
c
SciTePress
paths from start to goal locations or, in some cases, a
coverage pattern of the accessible environment. In
many cases paths can only be constructed
incrementally as environment mapping data is
acquired from on-board sensors (possibly indicating
the location of previously unknown obstacles), if not
provided beforehand.
(d) Motion Control involves the mechanistic
operation of wheels, legs, propellers etc. to drive the
robot along the planned path.
(e) Communication amongst sensors, operator,
computational resources and mechanism
components is also essential. The distribution (and
redundancy) of these provisions on-board and off
(where there might be a remote base station) are
critical to efficiency, timeliness, safety and
reliability.
(f) Function refers to the intended operation,
whether it be directing water at a fire, picking up
suspicious baggage or apprehending a terrorist, or
some other requirement. This aspect is often
neglected or regarded as a “do last” task in the
system design process but should actually be
considered first, not only because the type of
vehicle, its sensory capabilities and its reliability are
dependent on its function but also because the
navigation modality may be less critical than the
manipulation (or some other task required) when the
goal is reached. For example, if the task requires the
close supervision by a remote operator (e.g. in
defusing a bomb) then a sophisticated autonomous
navigation strategy may not be justifiable, even if
possible.
Just how the above six aspects are sensibly
integrated is critically dependent on the functional
requirements, the available prior knowledge of the
environment, the dynamics of the situation and, not
least, on human risk related considerations.
3 NAVIGATION MODALITIES
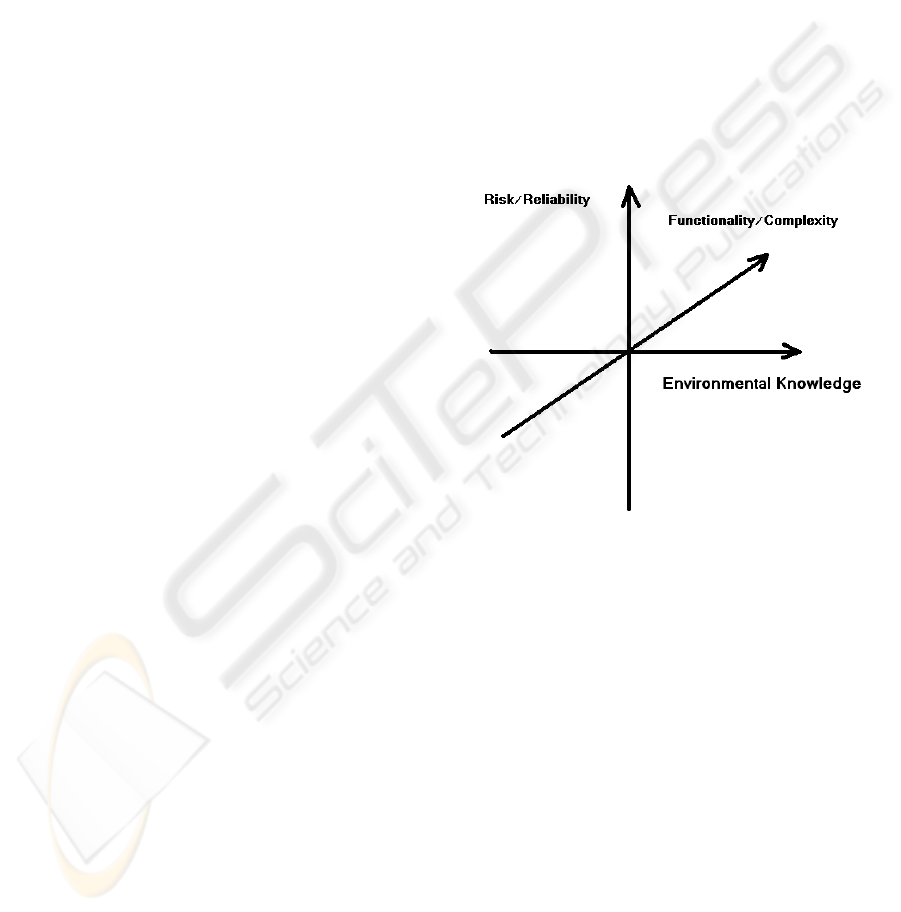
For the sake of structure, three dimensions of the
robot navigation modality choice process can be
identified (See Figure 1):
The first is that of degree of availability of prior
knowledge (e.g. maps, views, 3D geometry) or the
ease with which this can be acquired off-line (e.g.
via laser scanners, stereo views, appearance
mapping, etc.). When environmental knowledge
suitable for supporting robot navigation
(localisation, obstacle avoidance/path planning and
function) is readily available, it makes good sense to
use it as it is likely that such an approach would lead
to better accuracy, reliability and efficiency than
learning such knowledge using on-board sensors
alone.
The second dimension is that of the complexity of
the defined function and whether human agencies
would be required to handle them, whether or not
the pure navigational aspects could be automated to
some degree. For example, if the complex operation
of defusing a bomb via delicate teleoperated
manipulation with rich sensory feedback needs the
application of expert human skill, the necessary
attendance of the expert suggests that the navigation
may as well be by teleoperation also, unless this part
of the overall task is particularly tedious or time
consuming.
Figure 1: Robot Navigation Modality Choice Factors.
The third dimension is that of risk and reliability
requirement factors. For example, having a robot
clean a carpet or mow a lawn fully autonomously to
obviate human tedium makes good sense, since
degrees of unreliability and inefficiency can be
tolerated and very little human risk is involved. On
the other hand, using the bomb defusing example
again, the remoteness of the operator for risk
minimisation is the essential factor and the question
of modality of navigation may be considered
relatively irrelevant, so a flexible mixture of
automation and direct teleoperation may be suitable
for this application. Guiding a fire tanker to a fire
fighting location too hazardous for humans to attend
should perhaps be handled entirely by rich sensor
feedback supported teleoperation, since the safety of
other personnel operating in the vicinity may be
more severely jeopardised if a fully autonomous
system were used, especially as the situation is likely
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
296

to be subject to severe dynamic variation with a
moving fire front, changing wind conditions and the
extent of other fire fighting vehicle and personnel
deployment.
4 FLEXIBLE APPROACH TO
ROBOT NAVIGATION
Rather than accepting one rigidly defined robot
navigation modality along the spectrum from pure
teleoperation to fully autonomous operation, it
makes sense to devise ways in which these extremes
can be moved between gracefully with smooth
variation of the degree of human intervention
applied in a hybrid strategy where levels of
autonomy can be adjusted for particular tasks and
adapt to changing conditions over time. A good
example of this approach is where a disabled person
is using a wheelchair in complex environments with
the aid of robotically inspired sensory and control
mechanisms (Jarvis, 2001). The disabled occupant
may be permitted a user-adaptive degree of control
of the wheelchair within an envelope of safety
provided by the robotic instrumentation which
adjusts the degree of intervention to the capability of
the user to handle the situation over variations of
physical reflex, poor vision, degrees of fatigue etc.
Using a three level control strategy (see Figure 2)
nicely complements the notion of flexible navigation
modality selection. The lowest level can be purely
reaction based collision avoidance through stopping
or minor trajectory adjustments using close range
obstacle sensing as a trigger. The second level can
be thought of as “local guidance” which indicates a
safe passage over a limited range of movement,
generally in the intended direction. The top level is
global and includes complete path planning and
control transition strategies. In the robotic
wheelchair example, the human occupant provides
the top level strategy, the second level provides the
user with steering advice and the lowest level simply
avoids collisions.
In the more general robot navigation situation, the
top level could drift between fully human control via
teleoperation and fully autonomous operation, with
the lower two levels playing their roles in supporting
the global strategy. For example, a teleoperator, like
the wheelchair user, can direct the activities of the
robot using the advice of the second level and
accepting the collision avoidance reaction level as a
safety precaution should his attention stray.
Figure 2: Multi-level Control Heirarchy.
5 CASE STUDIES
The user adaptive robotic wheelchair (Jarvis, 2001)
described above is shown in Figure 3. The user can
indicate navigation intention using human gaze
detection but near collisions impose increasing
degrees of instrument driven navigation
intervention, with control being handed back to the
user gradually as near collision statistics improve.
The main environment sensor is a Erwin Sick laser
range finder. GPS is also provided for guidance as a
non-essential convenience.
Figure 3: User-Adaptive Robotic Wheel Chair.
ROBOT NAVIGATION MODALITIES
297

Figure 4 shows a fully autonomous rough terrain
tracked vehicle (Jarvis, 997) which uses GPS
localisation, laser range finder obstacle mapping,
and Distance Transform (Jarvis, 1994) path
planning. Only the goal location is indicated on an
environmental map which is populated with
obstacles as they are discovered by on-board
sensors. Collision-free optimal paths to the goal are
recomputed on a fairly continuous basis.
Figure 4: Autonomous Rough Terrain Tracked Robotic
Vehicle.
Figure 5 shows an indoor fully autonomous robot
(Jarvis, 1997) which can map its obstacle strewn
environment and continuously replan its paths to a
nominated goal. Localisation is achieved using a
Denning laser bar code reading localiser with bar
code beacons placed at known locations in the floor
plan.
Figure 5: Autonomous Indoor Beacon Localised Robot.
Figure 6(a) shows a teleoperated boom
lift(Jarvis,2006) and Figure 6(b) a teleoperated fire
tanker(Jarvis,2008). Teleoperation is supported by
video cameras, GPS, laser range finders and
pitch/tilt sensors. Figure 7(a and b) shows some of
the types of environmental mapping data available to
the teleoperator.
Figure 6(a): Teleoperated Boom Truck.
Figure 6(b): Teleoperated Fire Tanker.
Figure 8 illustrates a very recent experiment where
detailed off-line environmental mapping (Jarvis,
2007) was carried out using a Riegl LMS-Z420i
laser scanner provided with registered colour
imaging capabilities. Navigation tasks in the
“cyberspace” created by this environmental data
could be replicated in the real physical space from
which the model data was acquired using a physical
robot. The robot could localise itself using
panoramic images which were matched against
images extracted from the pre-scanned “cyberspace”
data. This approach does rely on the prior collection
of detailed environmental data but this process need
only be done once. The generality of this approach
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
298

and the ease of extension into 3D highly
recommends it for situations where prior data
collection can be justified e.g. in public spaces,
malls, air terminals etc.
Figure 7(a): Colour Rendered 3D Environmental Data.
Figure 7(b): Plan View of 3D Laser Range Scan.
Figure 8: Dense Laser/ Colour Vision Environmental Data
Collected Off-Line.
6 DISCUSSION AND
CONCLUSIONS
The idea that robot navigation solutions should be
flexible to span pure teleoperation to fully
autonomous operations with a three level control
strategy and smooth variations of human
intervention is a very practical one, since it can be
adapted to individual situations and changes of
circumstances at will. Also, as new methods,
improved sensor instrumentation and increased
affordable computation come to hand various
aspects of this approach can be tuned so that the
balance of control may shift but the continuum
maintained.
As the quality of SLAM solutions improve,
human/machine interfaces evolve, swarms replace
individual robots on distributed tasks, questions of
risk and responsibilities resolved and co-operative
interplays with human agencies developed,
maintaining the type of flexibility promoted by this
paper becomes even more reasonable and practical,
particularly as the inclusion of this kind of flexibility
does not impose any great additional cost and
provides a graceful degradation path.
In conclusion, this paper has advocated a flexible
approach to the selection of robot navigation
modalities to suit particular circumstances relating to
knowledge, risk, complexity, efficiency and
reliability factors so that working solutions to
important robot application domains can be applied
now and improved in the future without the
stagnation which may result from a more rigid
approach.
REFERENCES
Leonard, J. J., and Durrant-Whyte, H. F.
(1991)Simultaneous map building and localization for
an autonomous mobile robot. In IROS-91 (Osaka,
Japan), pp. 1442-1447.
Jarvis, R.A. (1993) A Selective Survey of Localisation
Methodology for Autonomous Mobile Robot
Navigation, accepted for presentation at the Robots for
Competitive Industry Conference, July 14-16,
Brisbane Australia, pp. 310-317.
Jarvis, R.A.(1994) On Distance Transform Based
Collision-Free Path Planning for Robot Navigation in
Known, Unknown and Time-Varying Environments,
invited chapter for a book entitled 'Advanced Mobile
Robots' edited by Professor Yuan F. Zang World
Scientific Publishing Co. Pty. Ltd. pp. 3-31.
ROBOT NAVIGATION MODALITIES
299

Jarvis, R.A.(2001) A Vision Assisted Semi-Autonomous
user-Adaptive Rough Terrain Wheelchair, Proc. 4th
Asian Conference on Robotics and its Applications, 6
- 8th June, Singapore, pp.45-50.
Jarvis, R.A.(1997)An Autonomous Heavy Duty Outdoor
Robotic Tracked Vehicle, Proc. International
Conference on Intelligent Robots and Systems,
Grenoble, France, Sept. 8-12, pp.352-359.
Jarvis, R.A. (1997) Etherbot - An Autonomous Mobile
Robot on a Local Area Network Radio Tether, Proc.
Fifth International Symposium on Experimental
Robotics, Barcelona, Catalonia, June 15-18, pp.151-163.
Jarvis, R,.(2006) Four Wheel Drive Boom Lift Robot for
Bush Fire Fighting, 10
th
International Symposium on
Experimental Robotics (ISER 2006), July 6-10, Rio de
Janeiro, Brazil.
Jarvis,R.A.,(2008) Sensor Rich Teleoperation Mode
Robotic Bush Fire Fighting, International Advanced
Robotics Program/EURON WS
RISE’2008,International Workshop on Robotics in
Risky Interventions and Environmental
Surveillance,7
th
to 8
th
Jan. Benicassim, Spain.
Jarvis,R.A., Ho,Ngia and Byrne, J.B, (2007 )Autonomous
Robot navigation in Cyber and Real Worlds, Accepted
for presentation, CyberWorlds 2007, Hanover,
Germany, Oct. 24
th
to 27
th
.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
300
