
CLOCK SYNCHRONIZATION IN INDUSTRIAL AUTOMATION
NETWORKS
Comparison of Different Syntonization Methods
Dragan Obradovic, Ruxandra Lupas Scheiterer, Chongning Na
Siemens AG, Corporate Technology, Information and Communications, Munich, Germany
Günter Steindl*, Franz-Josef Goetz**
Siemens AG, Automation and Drives, Industrial Automation Systems, Amberg, Germany
Siemens AG, Automation and Drives, Advanced Technologies and Standards, Nuremberg, Germany
Keywords: IEEE 1588, PTP, synchronization, syntonization, industrial automation network.
Abstract: Synchronization of distributed clocks is a critical task in many real time applications over Ethernet. The
Ethernet protocol, due to its non-deterministic nature, is not suitable for real-time applications with very
strict synchronicity requirements. However, the limit is continuously being pushed outwards by current
research. The Precision Time Protocol (PTP), delivered by the IEEE 1588 standard, provides high
synchronization accuracy and has been adopted in many real time applications in the areas of industrial
automation, measurement & control, communications etc. This paper will discuss several issues aimed at
improving the synchronization performance.
1 INTRODUCTION
Ethernet (IEEE 1997), due to its cheap cabling and
infrastructure costs, high bandwidth, efficient
switching technology and better interoperability, has
been adopted in various areas to provide the basic
networking solution. Many Ethernet-based
applications require the networked clocks to be
precisely synchronized. Typical examples include
base station synchronization for handover or
interference cancellation in telecommunication
networks (Nieminen
2007), distribution of
audio/video streams over Ethernet based networks
(IEEE 2007a), and motion control in industrial
Ethernet (Chen 2005). Standard Network Time
Protocol (NTP) (Mills 1989, 1994) synchronization
over Ethernet provides synchronization accuracy at
the millisecond level, which is appropriate for
processes that are not time critical. However, in
many applications, for example base station
synchronization or motion control, where only sub-
microsecond level synchronization errors are
allowed, a more accurate synchronization solution is
needed. The Precision Time Protocol (PTP) of the
IEEE 1588 standard (IEEE 2002) published in 2002,
is a promising Ethernet synchronization protocol, in
which messages carrying precise timing information,
obtained by hardware time stamping in the physical
layer, are propagated in the network to synchronize
the slave clocks to a master clock.
Factors that affect the synchronization quality
achievable by PTP include the stability of
oscillators, the resolution of message time stamping,
the frequency of synchronization message
transmission, and the propagation delay variation
caused by the jitter in the intermediate elements. The
synchronization error can be reduced by carefully
studying the sources that contribute to the error, by
choosing the most suitable implementation of PTP
for a specific application and by designing efficient
synchronization algorithms that make use of all
available information provided by the PTP protocol.
Some work has been done to enhance the
performance of IEEE 1588 taking the mentioned
factors into consideration. The authors of
(Jasperneite
2004) introduced the transparent clock
(TC) concept to replace the so-called boundary clock
(BC). BCs adjust their own clock to the master clock
and then serve as master clocks for the next network
85
Obradovic D., Lupas Scheiterer R., Na C., Steindl G. and Goetz F. (2008).
CLOCK SYNCHRONIZATION IN INDUSTRIAL AUTOMATION NETWORKS - Comparison of Different Syntonization Methods.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 85-92
DOI: 10.5220/0001494700850092
Copyright
c
SciTePress

segment. Cascaded control loops are generated,
which might lead to instabilities and deviation of the
distributed clocks. Using TCs, intermediate bridges
are treated as network components with known
delay, which is compensated in the carried timing
information. By doing this the synchronization at the
time client is not dependent on the control loop
design in the intermediate bridges. Hence
performance is improved. The TC concept has been
adopted in the new draft of IEEE 1588 published in
2007, and is used in this paper. In (Na 2007) we
analyzed the influence of jitters and frequency drift
and made suggestions for designing the parameters
for higher synchronization accuracy. This study was
extended in (Na 2008), where an algorithm to reduce
the error was introduced.
In this paper, we discuss how to efficiently use
the PTP messages to improve the synchronization
performance, i.e. convergence speed and error.
Problems arise when there is non-negligible
frequency drift. In this case, clocks should first be
syntonized, i.e. their frequency difference should be
estimated and appropriate control applied to remove
it. We study and compare different syntonization
methods, and propose an improved solution for the
syntonization and synchronization. Appropriate
simulation results verify our analytic study.
The paper is organized as follows: Section 2
introduces the system model and briefly describes
the PTP protocol. Section 3 introduces two methods
for syntonization, master and peer frequency ratio
estimation. In Section 4 we compare these methods
and propose a synchronization algorithm which is
based on both methods in section 5. Simulation
results are presented in Section 6.
2 SYSTEM MODEL
Fig. 1 illustrates the time synchronization in a
system with cascaded bridges.
1+N elements are
connected in a line topology. The first element is the
time server, also called (grand)master, which
provides the reference time to the other
N elements,
called slave elements, via time-aware bridges (TCs).
The master element periodically sends Sync
messages which carry the counter state of the master
clock stamped at the time of transmission. The
interval between two consecutive Sync messages is
T
. The i
th
Sync message, generated by the master
element at time
i
t , consecutively passes through all
slave elements. Quantities, certain or uncertain,
linked with the Sync message transmitted by the
master at time
i
t are labelled by the superscript i .
We call the propagation time between the n
th
slave
and its preceding element line delay and denote by
i
n
LD (also known as peer-to-peer delay in PTP).
(a) Network topology
(b) System parameters
Figure 1: System Model.
The message will be forwarded to slave element
1
+
n via a time-aware bridge after the bridge delay
i
n
BD . We define
i
n
LB to be the sum of line delay
plus bridge delay of Sync message
i at slave n . As
the line delays and bridge delays are not necessarily
constant in time, we define
1, −
−=
i
n
i
n
ni
LB
LBLB
δ
to be
the difference between the true LB value at slave n
that affected Sync messages
i and 1−i . All the
delays we have mentioned up to now are defined in
the absolute time. A delay
D measured by a local
clock takes the form
fD
⋅
where f is the clock
frequency (this product is replaced by an integral in
the case of frequency drift).
The transparent clock synchronization protocol is
depicted in Figure 2.
slave n-1 slave n slave n+1
S
y
n
c
m
e
s
s
a
g
e
i
i
n
S
S
y
n
c
m
e
ss
a
g
e
i
1
1
−
+
i
n
S
i
n
BD
i
n
LD
F
o
l
l
o
w
_
u
p
i
slave n-1 slave n
P
d
e
l
a
y
_
r
e
q
u
e
s
t
P
d
e
l
a
y
_
r
e
s
p
o
n
s
e
j
outreqn
S
_,
j
inreqn
S
_,1−
j
outrespn
S
_,1−
j
inrespn
S
_,
Line delay estimation Propagation of Sync messages
Figure 2: Illustration of PTP with transparent clocks.
The PTP has a master/slave structure. Timing
information is packaged in special telegrams and
propagated along the network. The synchronization
relies on two processes, the delay estimation process
and the timing propagation process. The delay
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
86

estimation process relies on 4 time-stamps,
j
outreqn
S
_,
,
j
inreqn
S
_,1−
,
j
outrespn
S
_,1−
and
j
inrespn
S
_,
:
slave n sends a delay request message to slave
1−n (which is the master in the case of slave 1) and
records its time of departure (1st). Slave
1
−
n (or
master) replies with a delay response message which
reports the time-stamps of receiving the delay
request message and sending the delay response
message (2nd and 3rd).
Slave n records the time it receives the response
message (4th). If slave n and
1−n have the same
clock frequency or the frequency drift is negligible,
the line delay can be calculated by:
(
)
(
)
2
)(
ˆ
_,1_,1
_,_,
j
inreqn
j
outrespn
j
outreqn
j
inrespn
j
n
SSSS
LDS
−−
−−−
=
(1)
where
)(
ˆ
LDS
j
n
is the j
th
estimated line delay using
slave
n ’s local clock (and equal uplink and
downlink line delays are assumed).
The true line
delay, measured in slave n ’s local clock ticks, is
n
S
j
n
j
n
fLDLDS ⋅=)( for constant frequency.
In the timing propagation process each slave
propagates the timing information of the master and
uses that information to adjust its own clock. The
master sends out a Sync message which contains the
timestamp
M
when this message was sent. A more
precise timestamp of the transmission of the Sync
message will be sent by a so-called “follow-up
message”. Slave 1 forwards the Sync message to
Slave 2, augmenting its content by the sum of its line
and bridge delays (converted to master time – it will
be explained presently how this is done), effectively
transmitting its estimate of the master time for the
time-instant of forwarding. This process is repeated
in each slave until the message reaches the time
client.
Consider for the moment that all the clocks have
the same frequency. Then the updating of the
content in slave n (i.e. his estimate of the master
time) follows:
)(
ˆ
)(
ˆ
ˆˆ
1
BDSLDSMM
i
n
i
n
i
n
i
n
++=
−
(2)
where
)(
ˆ
LDS
i
n
comes from the line delay estimation
in (1). The bridge delay
)(
ˆ
BDS
i
n
is taken to be
precisely known by using the time stamped at the
reception and the forwarding of the Sync message.
Equation (2) can be used for proper time
synchronization only if all clocks have the same
frequency for all the time. If there is frequency
difference between the clocks, the last two terms in
(2), corresponding to the slave’s counter increase
during the two delays, are not equal to the counter
increase during this time of the master clock.
Therefore, it is not suitable to use local time to
update the master clock estimate, as shown in (2).
To solve this problem, it is necessary to estimate the
frequency offsets, i.e. syntonize the clocks.
3 SYNTONIZATION AND
SYNCHRONIZATION IN PTP
As discussed in the previous section, if there are
clock frequency drifts or the clocks have different
frequencies, (1) and (2) are unsuitable for time
synchronization. The problem with the line delay
estimation in (1) is that
j
outrespn
S
_,1−
and
j
inreqn
S
_,1−
are measured by the clock in slave 1
−
n ,
whereas
j
inrespn
S
_,
and
j
outreqn
S
_,
are measured by the
clock in slave n . To convert all into the same
metric, the frequency difference between slave
1
−
n
and
n , i.e. neighboring slaves, needs to be known.
And in (2), the last two terms should be translated
into master time, i.e. the frequency difference of
grandmaster and the slave needs to be known.
We define the rate compensation factor (
RCF,
also called rate ratio, (IEEE 2007b)) to be the ratio
between the frequencies of two different clocks. We
use
YX
RCF
/
to denote the frequency ratio between
X and Y, i.e.
YXYX
ffRCF
=
/
. Then the correction
of (1) is:
(
)
()
2
2
)(
ˆ
1
/
_,1_,1
_,_,
−
⋅−
−
−
=
−−
nn
SS
j
inreqn
j
outrespn
j
outreqn
j
inrespn
j
n
RCFSS
SS
LDS
(3)
The master counter estimation equation of (2)
should be changed to:
(
)
()
MS
i
n
i
n
i
n
SM
i
n
i
n
i
n
i
n
n
n
RCF
BDSLDSM
RCFBDSLDSMM
/
1
/1
1
)(
ˆ
)(
ˆ
ˆ
)(
ˆ
)(
ˆ
ˆˆ
⋅++=
=⋅++=
−
−
(4)
To compute RCF, observe that a time interval
measured by two different clocks will result in
different clock counter values. RCF can be
calculated as the ratio of the clock counter values.
The same time interval
t
Δ
is measured by clock 1 as
11
ftC
⋅
Δ
=
Δ
, and by clock 2 as
22
ftC
⋅
Δ
=Δ .
Then, if the propagation time (latency) of messages
was always the same, RCF could be precisely
computed as
12
CC ΔΔ
of two consecutive messages,
since then their inter-departure and inter-arrival
interval would be the same. In reality this is not the
case, so a number of obtained RCF values have to
averaged, to remove as far as possible the zero-mean
CLOCK SYNCHRONIZATION IN INDUSTRIAL AUTOMATION NETWORKS - Comparison of Different
Syntonization Methods
87

error due to the latency variation. The effects of
congestion are minimized by assigning highest
priority to the IEEE 1588 messages.
In the rest of this section, we introduce two
methods which estimate
1
/
−nn
SS
RCF
and
MS
n
RCF
/
respectively
n
SM
RCF
/
. Both methods are based on the
timing information carried in PTP messages, but use
it in different ways.
3.1 Peer RCF Estimation
The RCF of neighboring elements can be estimated
using two consecutive delay estimation messages, as
depicted in Fig. 3.
slave n-1 slave n
P
d
e
l
a
y
_
r
e
q
u
e
s
t
j
P
d
e
l
a
y
_
r
e
s
p
o
n
s
e
j
j
outreqn
S
_,
j
inreqn
S
_,1−
j
outrespn
S
_,1−
j
inrespn
S
_,
Local RCF estimation
P
d
e
l
a
y
_
r
e
q
u
e
s
t
j
-
1
P
d
e
l
a
y
_
r
e
s
p
o
n
s
e
j
-
1
1
_,
−j
outreqn
S
1
_,1
−
−
j
inreqn
S
1
_,1
−
−
j
outrespn
S
1
_,
−j
inrespn
S
Figure 3: Peer RCF estimation.
1
/
−nn
SS
RCF
can be calculated as:
1
_,1_,1
1
_,_,
/
1
−
−−
−
−
−
=
−
j
outrespn
j
outrespn
j
inrespn
j
inrespn
SS
SS
SS
RCF
nn
(5)
Since the RCF calculated in (5) reflects the
frequency difference of the neighboring elements
and the estimation is only based on the message
between neighboring elements, we call it peer RCF.
For the master time estimation, we need
MS
n
RCF
/
(or
n
SM
RCF
/
), which can e.g. be
calculated by using the peer RCFs calculated in the
previous elements, i.e. slave 1 to
1−n :
∏
=
−
−
⋅=
⋅⋅==
n
i
SSMS
S
S
S
S
M
S
M
S
MS
ii
n
nn
n
RCFRCF
f
f
f
f
f
f
f
f
RCF
2
//
/
11
11
21
…
(6)
We call the RCF calculated this way cumulative
RCF. To calculate
MS
n
RCF
/
, slave n needs to
collect all the peer RCFs in its uplink. This can be
achieved recursively by modifying the Sync
messages so that they contain not only the time
information but also the cumulative RCF. So slave
n
calculates
MS
n
RCF
/
by multiplying the cumulative
RCF contained in the Sync message from slave
1
−
n with its peer RCF, i.e.:
11
///
−−
⋅=
nnnn
SSMSMS
RCFRCFRCF
(7)
3.2 Master RCF Estimation
The RCF can also be estimated using exclusively the
timing information contained in the Sync messages.
This is illustrated in Fig. 4.
slave n-1 slave n
S
y
n
c
m
e
s
s
a
g
e
i
-
1
1
1
ˆ
−
−
i
n
M
S
y
n
c
m
e
s
s
a
g
e
i
i
n
M
1
ˆ
−
F
o
l
l
o
w
_
u
p
i
-
1
F
o
l
l
o
w
_
u
p
i
1−i
n
S
i
n
S
Figure 4: Master RCF estimation.
The estimation of
n
SM
RCF
/
can be achieved by:
1
1
11
/
ˆˆ
−
−
−−
−
−
=
i
n
i
n
i
n
i
n
SM
SS
MM
RCF
n
(8)
Since (8) calculates directly the ratio of the clock
frequencies of the grand master and a slave, we call
it master RCF calculation.
The frequency ratio of two neighboring slaves
i.e.
1
/
−nn
SS
RCF
is then obtained as the quotient of
the two master RCF values:
n
n
nn
SM
SM
SS
RCF
RCF
RCF
/
/
/
1
1
−
−
=
(9)
4 MASTER VERSUS PEER RCF
In this section, we will compare the two RCF
calculation methods introduced in the previous
section based on two criteria: convergence speed of
the synchronization and the synchronization
performance in the case of constant frequency drift.
4.1 Evaluation of Convergence Speed
Next we ask how much time a slave element needs
to get the first correct timing information of the
master since the start of the synchronization. Eq. (4)
shows that an element has to have correct estimates
of line delay and
n
SM
RCF
/
in order to provide its
downlink slave the correct master clock estimate.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
88
Master RCF,
n
SM
RCF
/
, is calculated using (8),
and at least two Sync messages are needed. For
correct line delay estimation,
1
/
−nn
SS
RCF is
necessary. It is calculated via (9) after
n
SM
RCF
/
and
1
/
−n
SM
RCF
are available. So, line delay estimates are
correct after at least two Sync messages are
received, and therefore a slave gets a correct master
time estimate at the earliest after 3 Sync messages.
For peer RCF we first calculate
1
/
−nn
SS
RCF using
line delay estimation messages. Once
1
/
−nn
SS
RCF
is
available, line delay can be calculated. Since
1
/
−nn
SS
RCF
and line delays are calculated locally,
the estimation can be done in parallel, which
accelerates the convergence speed. If the first Sync
message is sent out when the first line delay is
finished, it can carry all correct information to the
slaves so that the slaves can estimate the master time
correctly. Another advantage of peer RCF is its
invariance to a change of (grand)master. The
1
/
−nn
SS
RCF
and line delay estimations are not
affected, whereas in the master RCF calculation
case, two Sync messages from the master are needed
for the line delay estimation. So it always takes more
time for synchronization via master RCF methods to
converge if a new master is elected in the network.
4.2 Synchronization Performance for
Constant Frequency Change
Next we compare the two RCF estimation methods’
ability to track the frequency drift in the master.
We investigate the scenario where the master
frequency is uniformly changing, e.g. due to heating,
and the clock frequencies at the slaves stay constant.
For analytic simplicity transmission and reception
jitter is neglected, and hence the line delays can be
perfectly determined. They are not neglected in our
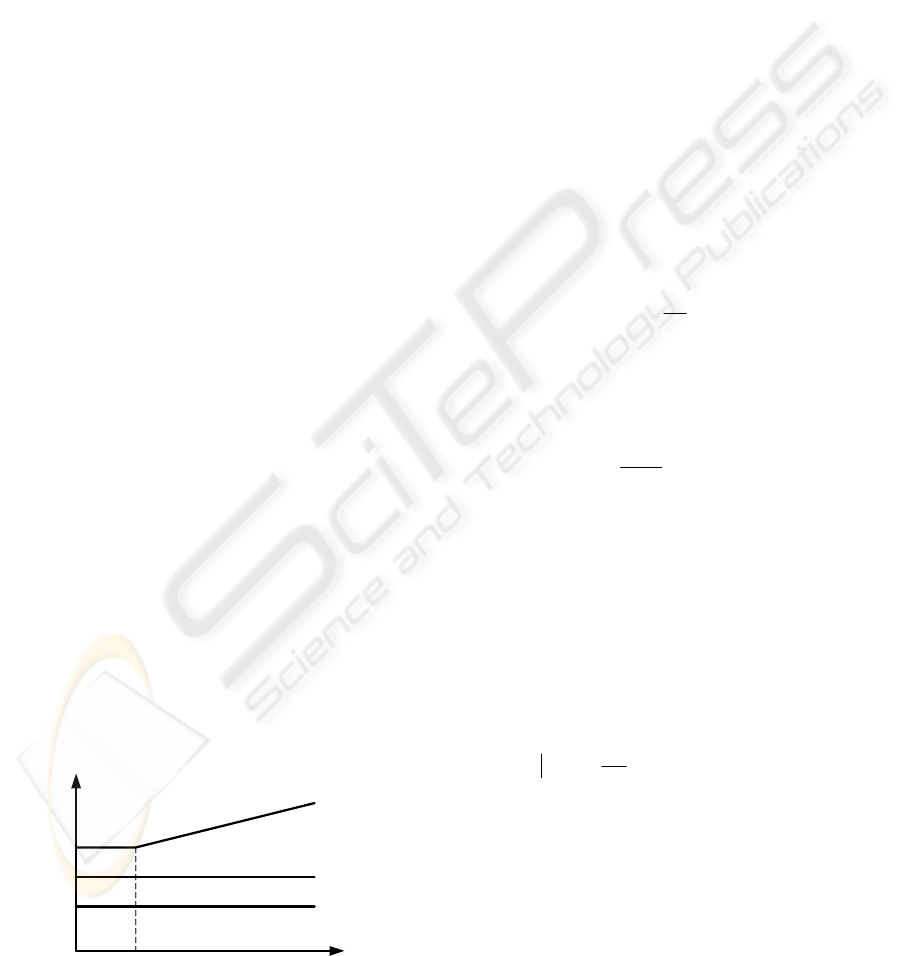
simulation in Section 6. Fig. 5 plots the frequency of
each element as a function of the absolute time.
f
M
f
S1
f
S2
freq
time
t
0
Figure 5: Frequency profile in master heating scenario.
The frequency of all elements is constant until
0
t , then the frequency of the master element
increases linearly. In the case where the frequency
change depends nonlinearly of the underlying cause,
our analysis can be seen as a local first order
approximation.
Let the slope of the frequency change of the
master clock be
M
Δ
. So the master’s frequency
follows:
0111
with )()()( ttttttftf
iiiiMiMiM
>>
−
⋅
Δ
+
=
−−−
(10)
where
i
t is the time when the i
th
Sync message is
transmitted by the master. The counter value
increase of each element from time
1−i
t to
i
t is
obtained by integrating the element’s frequency over
the interval
(
)
ii
tt ,
1−
. For the slave element, whose
frequency is constant, the counter value evolves as:
)()()(
11 −−
−
⋅
+
=
iiSii
ttftStS
(11)
For the master element, the counter value
increase is calculated as:
[]
2
111
111
)(
2
)()(
)()()()()(
11
−−−
−−−
−⋅
Δ
+−⋅=
⋅−⋅Δ+=⋅=−
∫∫
−−
ii
M
iiiM
t
t
iiMiM
t
t
Mii
tttttf
dttttfdttftMtM
i
i
i
i
(12)
Due to the linearity of the frequency change, (12)
can be alternatively expressed as the product of the
frequency in the middle of the time interval times
the interval length, which is sometimes a more
useful form:
()
1
1
1
2
)()(
−
−
−
−⋅
⎟
⎠
⎞
⎜
⎝
⎛
−
−=−
ii
ii
iMii
tt
tt
tftMtM
(13)
The error study for the synchronization with
master RCF calculation can be found in (Na 2007,
2008), where we derive the general expression for
the error in the master counter estimate of slave
N ,
at the time when it forwards the Sync message to
slave
1
+
N . For simplicity of derivation, here we let
all line delays and bridge delays be constant in time
(the general expression can be found in (Na 2008)).
Then in the time period of unchanged frequency
gradient the error in the master counter estimate of
slave N takes the form:
⎥
⎦
⎤
⎢
⎣
⎡
∑
+
∑
⋅⋅
Δ
≈−
==
+
∑
=
2
11
)(
2
ˆ
1
N
n
i
n
N
n
i
n
M
LBt
outS
LBLBTMM
N
n
i
ni
N
(14)
where
)(tM is the true counter value at time t , and
M
ˆ
is the estimated one.
We use Fig. 6 to illustrate the error in (14). The
area under the linearly rising master frequency
M
f
corresponds to the true master counter. The white
portion thereof is the estimated master counter value
at slave 2, which is the sum of the master counter
value in the original Sync message plus the product
of local delay times
RCF estimate at each slave. It is
CLOCK SYNCHRONIZATION IN INDUSTRIAL AUTOMATION NETWORKS - Comparison of Different
Syntonization Methods
89

based only on the master frequency curve between
2−i
t and
i
t , shown solid, and holds regardless of the
further gradient, shown dotted. The gray area is the
estimation error in (14), which has two parts. The 1
st
is proportional to the time elapsed between Sync
messages, and to the total delay (grey rectangles in
Fig. 6); the 2
nd
is the sum of squares of local delays
(grey triangles in Fig. 6). We see that the
propagation of Sync messages let the slave elements
partially follow the recent-past frequency change of
the master. As the calculation of RCF uses two
consecutive Sync messages, slave elements learns
the trend of the frequency change of the master from
the counters delivered in these two Sync messages.
f
M
f
S1
f
S2
freq
time
t
0
T
()()()()
⎥
⎦
⎤
⎢
⎣
⎡
+⋅++⋅
Δ
=
2
22
2
11
2
iiii
M
LBLBTLBLBTError
i
LB
1
i
LB
2
estimation error
t
i-1
t
i
Figure 6: Sync error at the second slave (using master
RCF).
For the synchronization with peer RCF, the Sync
messages carry the cumulative RCF which is a
product of the peer RCFs. Since the frequencies of
all slaves stay constant, their peer RCFs, i.e.
1
/
−nn
SS
RCF
(n=2 … N) don’t change and are:
1
1
/
−
−
=
n
n
nn
S
S
SS
f
f
RCF
(15)
A Sync message sent at time
i
t by the grand
master arrives at slave 1 at time
i
i
LDt
1
+ . To
estimate the master time, slave 1 needs the latest
peer RCF and line delay estimates. Suppose that for
some
j with
ijj
tttt ≤<<
−10
, the estimation was
done based on the delay response message received
at
1
1
1
−
−
+
j
j
LDt and
j
j
LDt
1
+ . Then the peer RCF
between slave 1 and the grandmaster is estimated as
in (11) and (13):
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
≈
−⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
+−⋅
=
−
+−+
=
−
−
−
−
−
−
−
2
)(
2
)(
)()(
)()(
1
1
1
,1
1
1
1
1
11
1
1
/
11
1
jj
jM
S
jj
jj
jM
j
LD
jjs
jj
j
j
j
j
MS
tt
tf
f
tt
tt
tf
ttf
tMtM
LDtSLDtS
RCF
δ
(16)
The error in this estimation is due to the small
variation in line delays due to jitter. Inserting (15),
(16) in (7), the cumulative RCF for each slave is:
()
1
/
1
1
/
2
2
11
21
−
−
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
⋅⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
−
n
n
n
n
n
SM
jj
jM
S
S
S
S
S
jj
jM
S
MS
RCF
tt
tf
f
f
f
f
f
tt
tf
f
RCF …
(17)
The master counter value estimated at each slave
when it forwards the Sync message according to (4)
with the help of cumulative RCF is:
∑
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−⋅+=
∑
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
⋅⋅+=
∑
⋅+=
=
−
=
−
=
+
∑
=
N
n
jj
jM
i
ni
N
n
S
jj
jM
S
i
ni
N
n
SM
i
ni
LBt
outS
tt
tfLBtM
f
tt
tf
fLBtM
RCFLBStMM
n
n
n
N
n
i
ni
N
1
1
1
1
1
/
2
)(
2
)(
)(
ˆ
)(
ˆ
1
(18)
We have assumed that the line delay estimation
is correct. The true master counter value
corresponding to this time point is:
()
2
11
1
2
)(
)(
1
⎟
⎠
⎞
⎜
⎝
⎛
∑
⋅
Δ
+
∑
⋅+=
∑
+=
==
=
+
∑
=
N
n
i
n
M
N
n
i
niMi
N
n
i
ni
LBt
LBLBtftM
LBtMM
N
n
i
ni
(19)
Comparing (18) with (19), the estimation error
using cumulative RCF is:
2
1
1
1
2
2
ˆ
1
⎟
⎠
⎞
⎜
⎝
⎛
∑
⋅
Δ
+
+
∑
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+−⋅Δ≈−
=
=
−
+
∑
=
N
n
i
n
M
N
n
i
n
jj
jiM
LBt
outS
LB
LB
tt
ttMM
N
n
i
ni
N
(20)
and is shown in Fig. 7 (grey area) for the 2
nd
slave.
f
M
f
S1
f
S2
freq
time
t
0
()()
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+++⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+−⋅
Δ
=
−
2
2121
1
2
2
2
iiii
jj
ji
M
LBLBLBLB
tt
ttError
i
LB
1
i
LB
2
estimation error
t
j-1
t
i
t
j
Figure 7: Sync error at the second slave (using peer RCF).
Compare the error expressions in (20) and (14):
since
1−
−
jj
tt (interval of delay messages) is usually
greater than
1−
−
=
ii
ttT (interval of Sync messages),
the 1st term in (20) is greater than the first term in
(14). So are the 2nd terms. Our study shows that
master RCF calculation performs better than peer
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
90

RCF calculation in estimating the master counter in
the case of constant frequency drift in the master.
5 IMPROVED SYNTONIZATION
AND SYNCHRONIZATION
In the previous section we have evaluated the
performance of synchronization algorithms with
peer RCF calculation and master RCF calculation.
Peer RCF makes the convergence of synchronization
faster, while master RCF tracks the frequency drift
better. To improve the overall performance of PTP
synchronization, we propose a method which
combines both estimation methods.
The improved synchronization algorithm
contains two phases: initial phase and steady phase.
The initial phase starts at a restart. Each slave
estimates peer RCF, i.e.
1
/
−nn
SS
RCF
and line delay
locally using (5) and (3). The 1
st
Sync message is
generated by the master.
Between the 1
st
and the 2
nd
Sync message there
are 2 options. Either cumulative RCF is transmitted
in the 1
st
Sync message, in which case the slave
elements calculate the cumulative RCF using (7) and
then estimate the master counter value using (4).
This has the advantage of a convergence sped up by
one Sync interval, at the cost of allowing for
transmission of cumulative RCF, for which there is
however enough free space in the Sync message. Or,
nothing is done until the 2
nd
Sync message.
The steady phase begins with the 2
nd
Sync
message. Since two Sync messages are now
available, master RCF can be estimated as in (8).
From the 2
nd
Sync message onward, master RCF
will be used in (4) for the estimation of master
counter value and the cumulative RCF will not be
propagated any more. For the line delay estimation,
we still use peer RCF calculation.
By using peer RCFs and possibly cumulative
RCFs in the initial phase, the time for convergence
is shortened. In the steady phase, using master RCF
provides higher synchronization accuracy.
6 SIMULATION RESULTS
We have developed a MATLAB simulation tool to
test and analyze the synchronization performance of
IEEE 1588 in a line with cascaded bridges. We have
used this tool to simulate PTP in PROFINET
(Jasperneite 2005). The model parameters,
summarized in Table 1, are given by the Siemens
Automation & Drive department. Comparative runs
with other parameters have yielded similar results.
In the simulation, the master temperature increases
with a speed of 3K/s, resulting in a frequency drift of
3ppm/s. The temperature change starts at 20s,
increases from 25°C to 85°C in the next 20s, then
stays constant again. The frequency of slave
elements never changes.
Table 1: Simulation settings.
Parameter Value
Number of elements 80
Nominal Frequency 100MHz
Cable delay 100ns
Bridge delay Uniform [5 15]ms
Temperature change 3K/s
Frequency Change 1ppm/K
Interval of Sync Message 32ms
Interval of Pdelay_request 8s
Interval of RCF calculation 200ms
Number of RCF averaging 7
In Fig. 8 we test the PTP synchronization with
master RCF calculation, showing the
synchronization errors for slaves 19, 39, 59 and 79.
We observe large errors at the beginning of the
synchronization. As discussed in Sect. 4.1 each
element doesn’t get the correct master counter value
until the 3
rd
Sync message arrives. There is a biased
error between 20 and 40s, which is caused by the
constant frequency change in the master clock.
0 20 40 60
−5
0
5
x 10
−6
slave 19
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 39
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 59
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 79
simulation time [s]
absolute error [us]
Figure 8: Synchronization error when using master RCF.
In Fig. 9 we repeat the simulation with peer RCF
calculation. We see that the synchronization using
peer RCF has a very smooth initial phase as the 1
st
Sync message already contains the correct
information of RCF (by cumulative RCF) and line
delay estimate. However, if we look at the time
period between 20s and 40s when the frequency drift
CLOCK SYNCHRONIZATION IN INDUSTRIAL AUTOMATION NETWORKS - Comparison of Different
Syntonization Methods
91
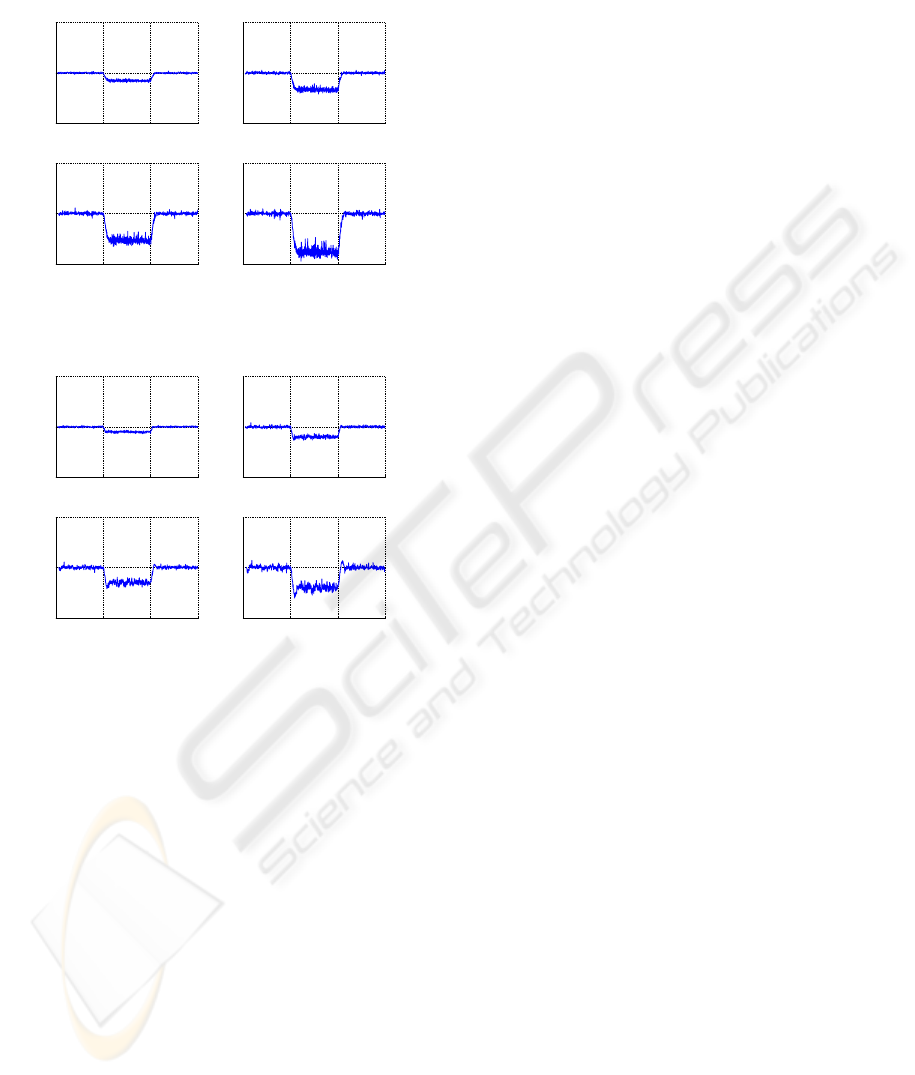
in the master clock takes place, we observe a larger
error (deviation from 0) than for the same slave in
Fig. 8, which validates our analysis in Sect. 4.2.
0 20 40 60
−5
0
5
x 10
−6
slave 19
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 39
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 59
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 79
simulation time [s]
absolute error [us]
Figure 9: Synchronization error when using peer RCF.
0 20 40 60
−5
0
5
x 10
−6
slave 19
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 39
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 59
simulation time [s]
absolute error [us]
0 20 40 60
−5
0
5
x 10
−6
slave 79
simulation time [s]
absolute error [us]
Figure 10: Synch. error with peer RCF and master RCF.
In Fig. 10 we simulate the algorithm where peer
RCF and master RCF are combined. We see a better
initialization compared with the result in Fig. 8 and
smaller error during the frequency drift compared to
Fig. 9. This confirms the improved performance we
expect for the combination of peer and master RCF
calculation.
7 CONCLUSIONS
In this paper, we have introduced two methods that
calculate the frequency ratio of two elements based
on the information contained in PTP messages. The
peer RCF calculation utilizes delay messages locally
and leads to fast convergence. The
master RCF
calculation use Sync messages to calculate the
frequency ratio between the grandmaster and the
slave. It performs better when there is constant
frequency drift in the master clock. It has been
shown both through analysis and simulation results
that a combination of both methods improves
synchronization performance. Future work could
illuminate the optimal combination of master RCF
and peer RCF estimation for widely different system
parameters or system requirements.
REFERENCES
Chen B., Chen Y.P., Xie J.M., Zhou Z.D., Sa J.M., 2005.
Control methodologies in networked motion control
systems. In: Proc. of 2005 International Conference
on Machine Learning and Cybernetics, Guangzhou.
IEEE, 1997. Standard for LAN/MAN CSMA/CD Access
Method, IEEE, New York.
IEEE, 2002. IEEE Standard for a Precision Clock
Synchronization Protocol for Networked Measurement
and Control Systems. IEEE, New York. ANSI/IEEE
Std 1588-2002.
IEEE, 2007. Standard for Local and Metropolitan Area
Networks - Timing and Synchronization for Time-
Sensitive Applications in Bridged Local Area
Networks, IEEE, New York.
IEEE, 2007. IEEE P1588
TM
D2.2 Draft Standard for a
Precision Clock Synchronization Protocol for
Networked Measurement and Control Systems, IEEE,
New York.
Jasperneite J., Shehab K., Weber K., 2004. Enhancements
to the time synchronization standard IEEE-1588 for a
system of cascaded bridges. In: Proc. of 2004 IEEE
International Workshop on Factory Communication
Systems, Vienna.
Jasperneite J., Neumann P., 2004. How to guarantee real-
time behaviour using Ethernet. In: Proc. of 11th IFAC
Symposium on Information Control Problems in
Manufacturing (IN-COM2004), Salvador-Bahia.
Jasperneite J., Feld J., 2005. PROFINET: an integration
platform for heterogeneous industrial communication
systems. In: Proc. of ETFA 2005, 10th IEEE
International Conference on, Catania.
Mills, D.L., 1989. Internet time synchronization: The
network time protocol. Network Working Group
Request for Comments.
Mills, D.L., 1994. Precision synchronization of computer
network clocks. Available: citeseer.nj.nec.com/
mills94precision.html.
Na, C., Obradovic D., Scheiterer R.L., Steindl G. and
Goetz F.J., 2007. Synchronization Performance of the
Precision Time Protocol. In: 2007 IEEE International
Symposium on Precision Clock Synchronization for
Measurement, Control and Communication, Vienna.
Na, C., Obradovic D., Scheiterer R.L., Steindl G. and
Goetz F.J., 2008. Enhancement of the Precision Time
Protocol in Automation Networks with a Line
Topology. Submitted to: IFAC 2008, Seoul.
Nieminen, J., 2007. Synchronization of Next Generation
Wireless Communication Systems. Master thesis,
Helsinki University of Technology, Helsinki.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
92
