
DETERMINE TASK DEMAND FROM BRAIN ACTIVITY
Matthias Honal and Tanja Schultz
Carnegie Mellon University, 407 South Craig Street, Pittsburgh 15213, PA, USA
Karlsruhe University, Am Fasanengarten 5, 78131 Karlsruhe,Germany
Keywords: Human-centered systems, Brain Activity, EEG, Task Demand Identification, Meeting and Lecture Scenario.
Abstract: Our society demands ubiquitous m
obile devices that offer seamless interaction with everybody, everything,
everywhere, at any given time. However, the effectiveness of these devices is limited due to their lack of
situational awareness and sense for the users’ needs. To overcome this problem we develop intelligent
transparent human-centered systems that sense, analyze, and interpret the user’s needs. We implemented
learning approaches that derive the current task demand from the user’s brain activity by measuring the
electroencephalogram. Using Support Vector Machines we can discriminate high versus low task demand
with an accuracy of 92.2% in session dependent experiments, 87.1% in session independent experiments,
and 80.0% in subject independent experiments. To make brain activity measurements less cumbersome, we
built a comfortable headband with which we achieve 69% classification accuracy on the same task.
1 INTRODUCTION
Our modern information society increasingly
demands ubiquitous mobile computing systems that
offer its users seamless interaction with everybody,
everything, everywhere, at any time. Although the
number and accessibility of mobile devices such as
laptop computers, cell phones, and personal digital
assistants grows rapidly, the effectiveness in
supporting the users to fulfilling their tasks proves to
be much smaller than expected. This mainly results
from the fact that such devices lack situational
awareness and sense for the users’ needs. As a
consequence users waste their time with manually
configuring inflexible devices rather than obtaining
relevant information and efficient automatic support
to solve their problems and tasks at hand.
It is our believe that the solution lies in intelligent
trans
parent human-centered systems that sense,
analyze, and interpret the needs of their users, then
adapt themselves accordingly, provide the optimal
support to given problems, and finally present the
relevant results in an appropriate way. The goal of
the work presented here is to solve the analytical
part of human-centered systems, i.e. sensing,
analyzing, and interpreting the users’ needs.
For this purpose we develop learning approaches
t
hat derive the users’ condition from their brain
activity. We are interested in conditions that are
important in the context of human-computer
interaction and human-human communication. In
this particular study we focus on the (mental) task
demand as a user condition in the context of lecture
presentations and meetings.
The term task demand defines the amount of mental
resources require
d to execute a current activity.
Although we are using the general term task de-
mand, we are exclusively concerned about the men-
tal not the physical task demand. Task demand infor-
mation can be helpful in various situations, e.g.
while driving a car, operating machines, or perform-
ing other critical tasks. Depending on the level of
demand and cognitive load, any distraction arising
from electronic devices such as text messages, in-
coming phone calls, traffic or navigation informa-
tion, etc. should be suppressed or delayed. Also, the
analysis of task demand during computer interaction
allows to asses usability. In a lecture scenario, a
speaker may use task demand information to tailor
the presentation toward the audience.
In this paper we investigate the potential of detecting
t
ask demand by measuring the brain activity using
scalp electrodes. Although we focus on the system
evaluation in the lecture and meeting scenario, the
described methods are applicable to any other real-
life situation. To make electrode-based recordings
acceptable, the following issues must be addressed:
100
Honal M. and Schultz T. (2008).
DETERMINE TASK DEMAND FROM BRAIN ACTIVITY.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 100-107
DOI: 10.5220/0001069001000107
Copyright
c
SciTePress

• Robustness: The system needs to be robust against
artefacts introduced by speech or body movement
• Usability: EEG sensors and recording device need
to be user friendly and comfortable to wear
• Applicability: Measuring brain activity must be
feasible in realistic scenarios in real-time.
In this work we are addressing these three goals by
relaxing the inconveniences of clinical brain activity
recording and make it applicable to real human-
computer interaction and human-human communi-
cation scenarios.
2 ELECTROENCEPHALOGRAM
The source of the Electroencephalogram (EEG) is
neural activity in the cortex, the outmost part of the
human brain. This neural activity causes electrical
potential differences, which can be measured using
scalp electrodes. Information between neurons is
transferred via the synapses where chemical
reactions take place causing ion movements. These
movements result in excitatory or inhibitory
electrical potentials in the post-synaptic neurons.
The electrical fields emerging from the ion
movements are called cortical field potentials and
have a dipole structure. If the electrical activity of a
huge number of neurons is synchronized, the
corresponding dipoles point all in the same
direction. Their sum becomes large enough such that
potential differences between particular scalp
positions and a constant reference point can be
measured. EEG characteristics like frequency,
amplitude, temporal and topographic relations of
certain patterns can then be used to make inferences
about underlying neural activities (Zschocke, 1995).
In the EEG which can be measured at the scalp,
amplitudes between 1μV and 100μV and fre-
quencies between 0Hz and 80Hz can be observed.
These EEG signals show specific characteristics at
different scalp positions, depending on the current
mental condition. When the human brain is not
absorbed by external sensory stimuli or other mental
processes, we usually observe the α-activity across
the cortex, i.e. rhythmic signals between 8Hz and
13Hz with large amplitudes. When performing
higher mental processes the α-activity is attenuated
and other activity patterns occur in those cortex
regions, where the processes happen. In many cases
these patterns are identified by γ-activity, which
typically show frequencies around 40Hz and have a
lower amplitude than α-activity (Schmidt and
Thews, 1997). In this work we assume that the de-
gree of α-activity attenuation and activity at higher
frequencies is correlated with task demand. This is
justified by the fact that the amplitude of non-α-
activity is correlated with the degree of vigilance, a
physiological continuum between sleepiness and
active alertness (Zschocke, 1995). Furthermore, it is
known that people are more alert when the task
demand is high. The frequency analysis of our
recorded data confirms this assumption. During most
activity types several cortex regions are involved
and task demand is characterized by the amplitude
of non-α-activity in all regions involved in the
current task. This suggests that the activity of the
whole cortex must be taken into account to achieve
optimal results for task demand estimation.
3 TASK DEMAND & VIGILANCE
A large body of research work concerns the
computational analysis of brain activity, applying
EEG, functional magnetic resonance imaging, and
functional near infrared spectroscopy to areas such
as estimation of mental task demand. Several groups
reported research on the computational assessment
of task demand based on EEG data recorded while
varying the task difficulty (Smith, 2001), (Pleydell-
Pearce, 2003), (Berka, 2004). These studies focused
on the design of intelligent user interfaces that
optimize operator performance by adjusting to the
predicted task demand level. Regression models
were trained to predict task demand from the
recorded EEG data. These models used the task
difficulty or the rate of errors as references during
task execution. The features extracted from the EEG
data represented mostly the frequency content of the
signals. Positive correlations between predictions
and references or predictions and self-estimates of
task demand (Smith, 2001) are reported throughout
these studies. Pleydell-Pearce (2003) achieved a
classification accuracy of 72% for the discrimination
of low versus high task demand in subject and
session dependent experiments and 71% in subject
independent experiments. Task demand assessment
has also been done on data from other modalities,
including muscular activity (Pleydell-Pearce, 2003),
blood hemodynamics (Izzetoglu, 2004), and pupil
diameter (Iqbal, 2004). Reasonable results could be
achieved with all three modalities. However,
correlations between pupil diameter and task
demand could only be shown for one interactive task
out of a group of various cognitive tasks.
Other work focused on the EEG-based estima-
tion of operator’s vigilance during sustained atten-
tion tasks (e.g. car driving or operating a power
plant). Jung (1997) asked subjects to respond to
auditory stimuli which simulate sonar target
detection, while EEG was recorded from five
DETERMINE TASK DEMAND FROM BRAIN ACTIVITY
101
electrodes over the parietal, central and occipital
cortex. The error rate in terms of failures to respond
to stimuli was then used as reference for a Multi-
Layer ANN which was trained with a frequency
representation of the EEG signals to predict a
vigilance index between 0 and 1. On unknown data a
root mean square error (RMS-error) of 0.156
between predictions and references is reported for a
subject dependent experimental setup. Duta et al.
(Duta, 2004) recorded EEG from the mastoids while
subjects had to perform visual attention tasks.
Vigilance was labelled by experts who visually
inspected the recorded data. Three vigilance
categories “alertness”, “intermediate” and “drowsi-
ness” were distinguished. Using the coefficients of
an AR model as features for Multi-Layer ANNs
39% to 62% predictions matched the references in
subject independent experiments.
4 DATA & METHODS
4.1 Data Capturing
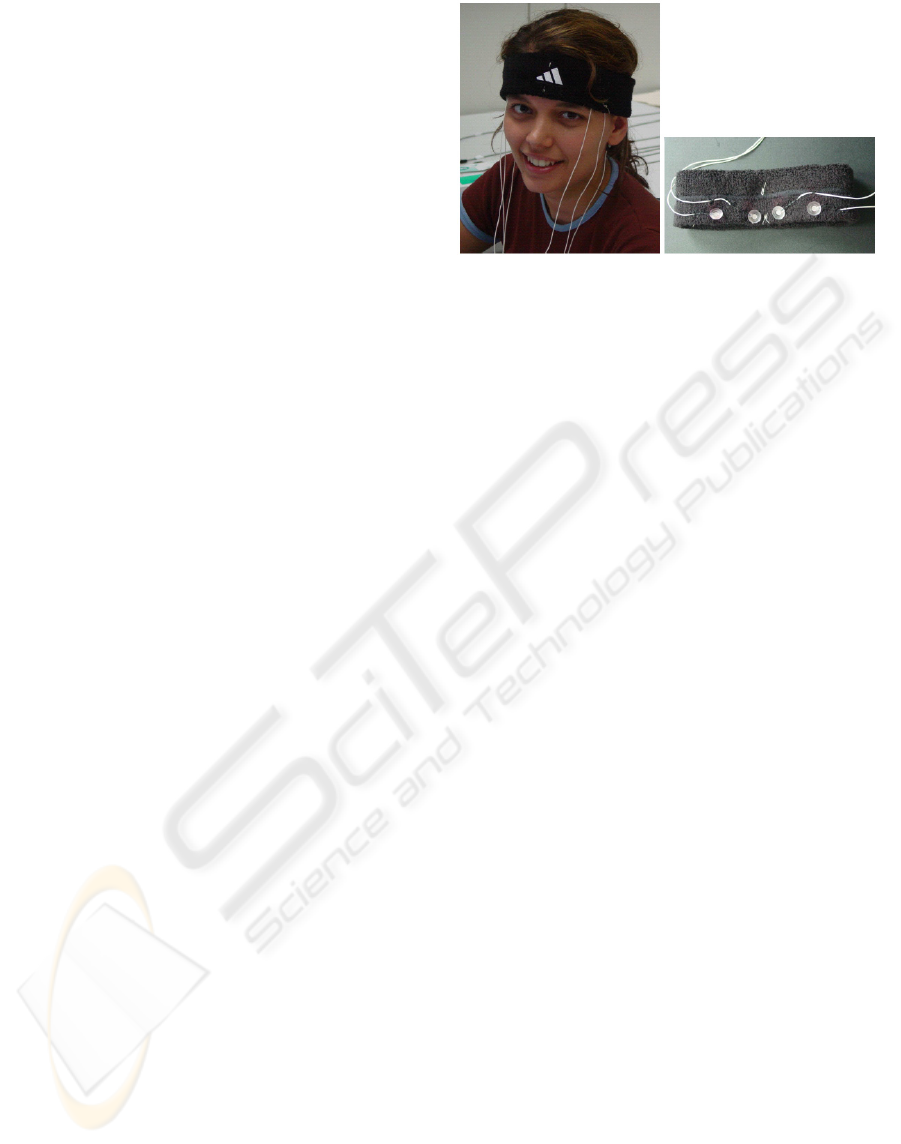
Two different devices were used for data
acquisition: an EEG-cap from ElectroCap™ and a
self-made EEG-headband (see Figure 1). The majo-
rity of data were recorded with the ElectroCap™
using 16 electrodes placed at positions fp1, fp2, f3,
f4, f7, f8, fz, t3, t4, t5, t6, p3, p4, pz, o1, and o2 ac-
cording to the international 10-20 system (Jasper,
1958). Reference electrodes were attached to the ear
lobes and linked together before amplification.
Although we are aware of the relationship between
facial expressions and level of task demand, we
decided to exclude the motor cortex from our mea-
surement for two reasons: firstly, the facial muscular
activity is partly captured by the frontal EEG
electrodes, and secondly we assume that motor
activity is of rather minor importance for the
assessment of our classification task.
Some data were recorded with a headband, in
which we sewed in four electrodes at the forehead
positions fp1, fp2, f7, and f8. Reference electrodes
were attached to the mastoids and linked together
before amplification, the ground electrode was
placed at the back of the neck. The headband has
three major advantages over the ElectroCap™ which
are crucial to real-life applications: the headband is
(1) more comfortable to wear, (2) much easier to
attach, and (3) better to maintain and clean, also no
electrode gel gets in contact with the subject’s hair.
The drawback is the limited positioning and number
of electrodes compared to the ElectroCap™.
Figure 1: Headband, build-in electrodes at fp1, fp2, f7, f8.
In contrast to recordings for clinical purposes,
subjects were allowed to move freely during the
recordings to keep the situation as natural as
possible, i.e. the subject's head was not fixated.
Consequently we had to deal with data artefacts
introduced by muscular activity (some recordings
required speaking as well). Strategies to remove
those artefacts will be described in section 4.2.
Amplification and A/D-conversion was done
with a 16 channel VarioPort™ physiological data
recorder (Becker, 2005). Each channel had an
amplification factor of 2775 and a frequency range
from 0.9Hz to 60Hz. After amplification, A/D
conversion was performed using 4096 A/D-steps
and a sampling rate of 256 Hz. The data was
transferred instantaneously from the amplifier to a
computer via an RS232 port for online processing.
The port capacity is limited to 115200 Bits per
second which corresponds to 28 electrode channels
at a sampling of 256Hz. Although sampling with a
lower frequency should be sufficient to avoid
aliasing when considering the amplifier’s upper
cutoff-frequency of 60Hz, we decided to go with
256Hz since for technical reasons the slope of the
band pass filter is very small.
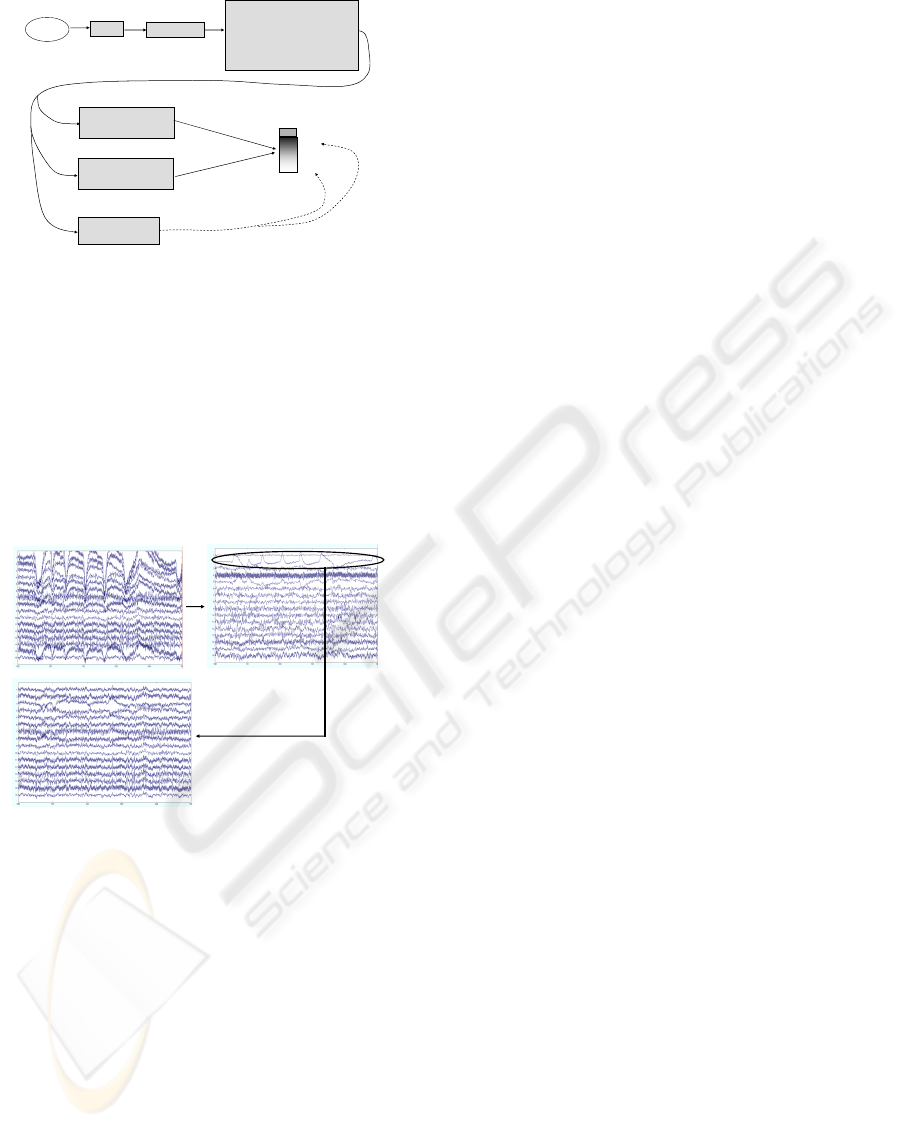
4.2 Data Preprocessing
Figure 2 summarizes the signal processing steps of
our task demand estimation system. After EEG
recording, artefacts are removed applying inde-
pendent component analysis (ICA). A short time
Fourier transform (STFT) is used for feature
extraction. After feature normalization and
averaging over temporally adjacent features,
different methods for reducing the dimensionality
are used. Finally, Support Vector Machines (SVMs)
or Artificial Neural Networks (ANNs) for
classification or regression are applied to obtain task
demand predictions. We also applied Self-
Organizing-Maps (SOMs) to determine which levels
of task demand can be reliably discriminated.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
102
EEG
Artifact Removal
ICA
averaging
normalization
dimensionality reduction:
• av. over freq. bands
• lin discr. analysis
• correlation based
ANNs
SVMs
Classification
Task Demand
low
medium
high
Overload
Task Demand
low
medium
high
Overload
Regression
ANNs
SVMs
STFT
Feature Extraction
Self-Organizing
Maps
Data Analysis
determine task demand levels to be distinguished
Figure 2: Task Demand Estimation System.
4.2.1 Artefact Removal
Artefacts such as muscular activity and especially
eye movements contaminate the EEG signal, since
the corresponding electrical potentials are an order
of magnitude larger than the EEG sources. This
causes in particular problems in the EEG that is
measured over the frontal cortex. ICA has shown to
be very efficient for artefact removal in EEG data
(Jung et al., 2000).
Original data ICA components
Back projected data
Removal of component 2
Figure 3: Artefact removal applying ICA: (1) independent
components are computed from the original data (top left),
(2) the second component (eye blinking artefact) is identi-
fied and rejected (top right), and (3) the data is projected
back to the original space (bottom left).
To apply ICA to EEG data it is assumed that the
signal measured at one electrode can be described by
a linear combination of signals emerging from
independent processes (i.e. cortical field potentials,
muscular artefacts, 60Hz AC noise): Let x(t) be the
vector of signals measured at all electrodes at time t
and s(t) be the independent components. Then x(t)
can be expressed by x(t) = A · s(t), where A is called
mixing matrix. ICA computes the matrix A, or its
inverse the de-mixing matrix W, such that
independent components can be estimated from the
measured signals (Hyväarinen et al., 2000). Artefact
components can then be identified either by visual
inspection of the training data or by using cross-
validation and be rejected from the data. The re-
maining components are projected back into the
original coordinate system (see Figure 3). For ICA
computation we used the open source Matlab tool-
box EEGLAB (Delorme et al., 2004), which applies
the Informax algorithm to the matrix estimation.
4.2.2 Feature Extraction, Averaging and
Normalization
After artefact removal we computed the power
spectrum of the time signal applying STFT. For two-
second long segments overlapping by one second,
features were computed representing the content of
frequency bands with 0.5Hz width. This results in
one feature vector per second. The dimensionality of
one feature vector for 16 electrode channels and
frequencies ranging from 0 to 45Hz is 16·90=1440.
To reduce the influence of outliers final feature
vectors for each time point were obtained by
averaging over k previous features. To compensate
for different ranges in the frequency bands, we
normalized each feature using the following two
normalization approaches:
• GlobalNorm: Feature means and variances are
calculated based on the complete training set.
Calculated values are used globally for mean
subtraction and variance normalization on all data
(training, validation, and test data).
• UserNorm: Feature means and variances are
calculated on training, validation, and test data
separately for each user. Then, user-specific mean
subtraction and variance normalization is applied.
4.2.3 Feature Reduction
Since the dimensionality of the feature vector may
be large compared to the amount of training data, we
investigated various feature reduction methods. A
straightforward approach is to average over adjacent
frequency bands, another approach is the Linear
Discriminant Analysis (LDA), which selects features
according to their discriminative power (Fukunaga,
1972). For sparse data and large dimensionalities,
LDA estimation may become ill-conditioned.
Therefore, we also applied a correlation-based
feature reduction method, which selects those
features that correlate best with the variable to be
predicted. This method proved to be particular use-
ful for the assessment of task demand, since – in
contrast to LDA – it takes into account the
continuous nature of the predicted variable.
DETERMINE TASK DEMAND FROM BRAIN ACTIVITY
103

4.3 Data Analysis
To learn more about the data structure and to gain
insights into the granularity and distinctness of task
demand levels, we generated self-organizing maps
(SOMs) (Kohonen, 1995) for the training data. After
obtaining the Best Matching Unit (BMU) for each
training example, a map was calculated which
visualizes colour-coded clusters corresponding to
different task demand levels. Thus the spatial
relation between the feature vectors belonging to the
different task demand levels can be visualized
concisely on a two dimensional grid. Although the
SOM-based analysis may indicate which task
demand levels are easy to discriminate, the
hypotheses have to be verified experimentally on
test data. SOM training and visualization were
performed with the MATLAB™ based SOM-
Toolbox (Vesanto et al., 2000).
4.4 Learning Methods
We investigated two types of classifiers: Multilayer
ANNs and SVMs. ANN classifiers were trained with
standard back-propagation, based on feed-forward
networks with a
tanh activation function and one
hidden layer. For all ANNs early stopping
regularization was performed and the number of
neurons in the hidden layer was determined on the
validation data. For SVM-based classification we
used an implementation of SVM
light
(Joachims,
1999), which directly addresses the multi-class
problem (Tsochantaridis, 2004). SVMs were
restricted to linear kernels to limit computational
costs and avoid extensive parameter tuning. By
treating the task demand levels as class labels (e.g.
“low”, “medium”, “high”), both classification
methods can be applied to the problem of task
demand estimation. To exploit the information
contained in the ordinal scaling of the different class
labels, we investigated the regression versions of
ANNs and SVMs as well.
Since ANN predictions fluctuate due to random
weight initializations, predictions from five
networks trained on the same data were combined
using majority decisions (in case of classification) or
averaging (in case of regression).
4.5 Evaluation Methods
The system performance for task demand
assessment is evaluated in terms of classification
accuracy. When regression methods are used, class
labels are assigned numeric values and each
prediction is assigned to the label with the closest
value. Although confusion matrices could lead to a
deeper understanding of pros and cons of the
prediction methods, we decided to use the more
concise classification accuracies. Results presented
here are averages over all test sets and all class
accuracies. The latter gives more reliable results in
the presence of unbalanced test sets.
We use the normalized expected loss to compare
accuracies that were calculated based on different
numbers of classes. Comparing accuracies directly
would not be appropriate since the chance accuracy
A
(c)
varies with the number of classes. The
normalized expected loss relates the observed error
to the chance error and thus makes it independent
from the number of classes. The value of the
normalized expected loss is bound by 1/ A
(c)
and
ranges between 0 and 1.
5 EXPERIMENTS
We conducted various experiments to evaluate task
demand assessment and collected EEG data for this
purpose, using both the headband and the
ElectroCap™. In offline experiments we analyzed
and optimized the processing steps of the system.
5.1 Data Collection
Task demand data was collected from subjects
perceiving an audio-visual slide presentation. The
presentations were tailored to the subjects’
educational background and designed to provoke
each task demand level with equal amount of time.
The presentations were video-taped so that each of
the subjects could evaluate their task demand
afterwards by watching the tape. We defined the
following task demand levels:
• Low: All details of the presentation are well
understood with low mental effort.
• Medium: Some mental effort is required to
follow the presentation, not all details may be
understood.
• High: All available mental resources are required
to understand at least the essence of the topic.
Most of the details are not understood.
• Overload: The presentation topic is not
understood. The subject is overwhelmed,
disengaged and makes no more effort to
understand the presentation.
In total 7690 seconds of data were recorded with the
ElectroCap™ from six students (three male, three
female) between 23 and 26 years old. One subject
was recorded twice. 1918 seconds of data were
recorded with the headband from two students (one
male, one female) between 21 and 28 years old.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
104

5.2 Experimental Setup
One major goal of our experiments was to
investigate the impact of user and session
dependencies on the system performance. The other
goal was to examine the efficiency and performance
of the headband compared to the ElectroCap™. We
therefore conducted user/session dependent and
independent experiments on ElectroCap™ and
headband recordings using the following setup:
UD: User and session dependent setup: Different
subsets of the same session were used for training
(80%), validation (10%), and testing (10%). Four
sessions were recorded with the ElectroCap™ and
two with the headband.
UI: User and session independent setup: The system
was trained on three of the four ElectroCap™
recording sessions and tested on the fourth session
in a round-robin fashion. For better comparability
the same test sets as for setup UD were used.
Validation was performed on two held-out
ElectroCap™ recording sessions.
SI: Session independent but user dependent setup:
One subject was recorded twice in two separate
sessions using the ElectroCap™. The system was
trained on one session and tested on the other,
without validation set.
5.3 Results – Data Analysis
Figure 4 compares for one subject the SOM trained
on all task demand levels (left-hand side) to the
SOM trained on high and low task demand level
(right-hand side). The grey-scaled dots represent the
best matching units (BMUs) on the grid belonging to
the feature vectors of different task demand levels.
The size of the dots is proportional to the amount of
feature vectors that share the same BMU. Obviously
we see a large overlap between the BMUs when all
four task demand levels are considered, while the
BMUs for low and high task demand seem to be
well separable. Same observations were made for
the SOMs trained on other subjects.
Baseline results on the UD setup (no averaging,
GlobalNorm normalization, no feature reduction,
linear classification SVMs) confirmed our
expectation that the four task demand levels are
difficult to discriminate (classification accuracy
40%, normalized expected loss 0.81). When
distinguishing low versus high task demand we
achieved a classification accuracy of 78% and a
normalized expected loss of 0.43. The major reason
for the poor results on discriminating all four levels
is that subjects had difficulties to identify the
boundaries between adjacent demand levels. To
investigate this we asked some subjects to re-
evaluate their task demand at a later time. We found
a low intracoder agreement among adjacent task
demand levels, while high versus low task demands
were rarely confused. In the remainder of this
section we will therefore focus on the discrimination
between low and high task demand.
Figure 4: SOM trained on all four task demand levels (left-
hand side) and on low vs. high task demand (right-hand
side). Grey scale intensity indicates task demand level,
ranging from low (light) to overload (dark).
Table 1 shows the average amount of data per
subject after removing the medium and overload
task demand recordings.
Table 1: Data per subject (in seconds) for all setups.
Setup Training Validation Test
UD 247 31 64
UI 740 229 64
SI 257 - 48
5.4 Results – Learning Method
Table 2 compares the regression and classification
versions of ANNs and SVMs for the baseline system
(no averaging, GlobalNorm normalization, no
feature reduction). For all three experimental setups
SVMs perform better than ANNs. For setup SI the
regression SVMs significantly outperform the
classification SVMs. For the other setups the
differences between the two SVM variants are rather
small. Since at least theoretically the regression
SVMs should be able to better exploit the ordinal
scaled information given in the task demand levels,
we decided to use these in the remainder of our
experiments.
DETERMINE TASK DEMAND FROM BRAIN ACTIVITY
105
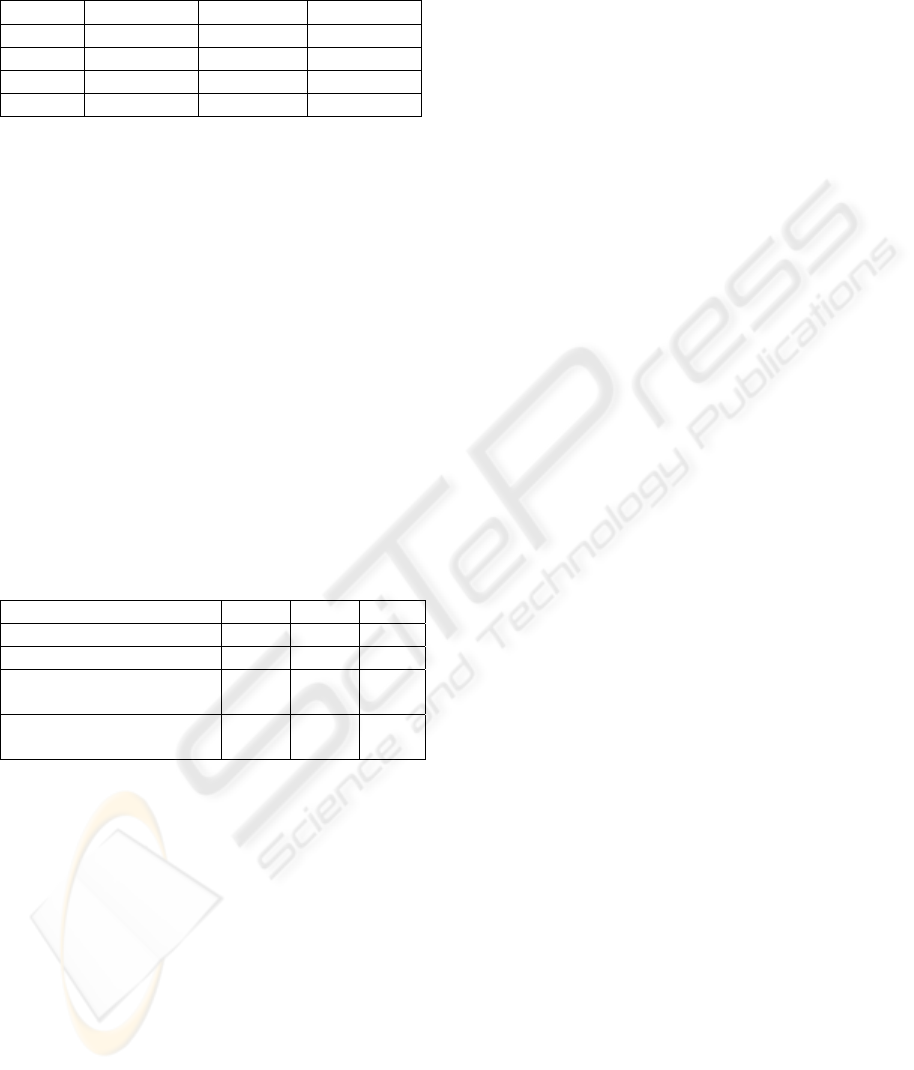
Table 2: Baseline system performance for all setups;
classification (
c
) and regression methods (
r
); In
parentheses: standard deviation for five ANN experiments.
Setup UD UI SI
SVM c 81% 72% 66%
SVM r 79% 74% 73%
ANN c 78% (7%) 70% (3%) 53% (5%)
ANN r 71% (3%) 69% (3%) 66% (5%)
5.5 Results – Normalization and
Feature Reduction
In the following experiments we optimized the
processing steps of our system in a greedy fashion
on the validation set. Table 3 shows the
classification accuracies for all experimental setups
with the optimal parameters (given in parentheses).
Averaging over k=2 feature vectors improved the
results for the UD and UI setup. The use of
normalization method UserNorm instead of the
baseline method GlobalNorm improved results for
setups UI and SI. This matches our expectation,
since this method reduces the variability across
sessions (UI and SI) as well as across subjects (UI).
Normalization is not relevant for the user dependent
setup (UD) since it only applies when data of
different subjects are used for training and test.
Table 3: Results for the optimized task demand system.
Setup UD UI SI
Baseline 78% 74% 73%
Averaging (k=2) 82% 79% 73%
Normalizing
(UserNorm)
N/A 80% 87%
Feature Reduction
(Corr-based)
92% 77% 66%
Feature reduction was only successful for UD,
where a correlation based reduction from 1440 to 80
features yielded considerable improvements. For the
other setups feature reduction did not help, probably
since despite normalization the data variability was
too large. Consequently, features which were well
correlated with task demand on the training data
exhibited poor correlations with task demand on the
test data. Comparing the results of feature reduction
among the different setups is difficult since the
optimal number of 80 features for the UD setup was
determined on the validation set, while we set this
number manually to 240 for the SI and UI setup as
the validation method did not give any reasonable
optimum.
Averaging over adjacent frequency bands for
feature reduction corresponds to putting features into
bins of size b. We observed that even for large
numbers of b the results did not drop much for any
of the setups. For b=45 (two features per electrode,
i.e. lower and the upper frequencies) results are in
the same range as without feature reduction. For
b=90 (one feature per electrode, 8 features in total)
results dropped significantly. This suggests that it is
sufficient to consider for task demand estimation the
content of two broad frequency bands: the lower
frequencies (around the α-band) and the higher
frequencies (around the γ-band). Experiments to
investigate this hypothesis are planned. The feature
reduction would benefit from more reliable model
estimation and reduced computational costs.
5.6 ElectroCap™ versus Headband
After optimizing the system parameters, experiments
using the UD setup were conducted on the headband
data. A classification accuracy of 69% could be
achieved. This compares to 69% using the four
ElectroCap™ recordings with 4 electrodes and 82%
with 16 electrodes. These results were achieved
without correlation based feature reduction. For the
reduced number of electrodes, the classification
accuracies for half of the subjects are at least 86% or
better, while for the other half they are around
chance. This implies that the feasibility of task
demand estimation based on four electrodes might
depend on the subject or even on the presentation
itself. As described above the presentations and
topics were tailored towards the educational
background of the subjects.
6 CONCLUSIONS
In this paper we described our efforts in building
human-centered systems that sense, analyze, and
interpret the users’ needs. We implemented several
learning approaches that derive the task demand
from the user’s brain activity. Our system was built
and evaluated in the domain of meeting and lecture
scenarios. For the prediction of low versus high task
demand during a presentation we obtained
accuracies of 92% in session dependent experiments,
87% in subject dependent but session independent
experiments, and 80% in subject independent
experiments. To make brain activity measurements
less cumbersome, we built a comfortable headband
with which we achieved 69% classification accuracy
for low versus high task demand discrimination.
Based on our findings we developed an online
system that derives user states from brain activity
using the headband (Honal et al., 2005). A
screenshot of our prototype is shown in Figure 5.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
106

Figure 5: Screenshot of our prototype online brain activity
system. The upper left monitor area displays the EEG
signal; the hypothesized current user state is shown in the
upper right corner. Spectrograms for the headband
electrodes fp1, fp2 f7 and f8 are shown at the bottom.
ACKNOWLEDGEMENTS
This material is in part based upon work supported
by the European Union (EU) under the integrated
project CHIL (Grant number IST-506909). Any
opinions, findings, and conclusions are those of the
authors and do not necessarily reflect the views of
the EU. The authors would like to thank Laura
Honal and Dana Burlan for their cooperation and
patience during the data collection, Christian Mayer
and Markus Warga for implementing the recording
software and tools, as well as Klaus Becker and
Gerhard Mutz for their support with respect to the
recording devices. Without the contributions of all
these people, this work would not have been
possible.
REFERENCES
Becker, K. VarioPort™. http://www.becker-meditec.com/.
Berka, C., Levendowski, D., Cvetinovic, M., et al., 2004.
Real-Time Analysis of EEG Indexes of Alertness,
Cognition, and Memory Acquired With a Wireless
EEG Headset. Int. Journal of HCI, 17(2):151–170.
Delorme A., Makeig, S., 2004. EEGLAB: an open source
toolbox for analysis of single-trial EEG dynamics.
Journal of Neuroscience Methods, 134:9-21.
Duta, M., Alford, C., Wilon, S., and Tarassenko, L., 2004.
Neural Network Analysis of the Mastoid EEG for the
Assessment of Vigilance. Int. Journal of HCI,
17(2):171–195.
Electro-Cap™, Electro-Cap International, Inc.:
http://www.electro-cap.com/.
Fukunaga, K., 1972. “Introduction to Statistical Pattern
Recognition”, Academic Press, New York, London.
Honal, M. and Schultz, T., 2005. Identifying User State
using Electroencephalographic Data, Proceedings of
the International Conference on Multimodal Input
(ICMI), Trento, Italy, October 2005.
Hyväarinen, A. and Oja, E., 2000. Independent
Component Analysis: Algorithms and Applications.
Neural Networks, 13(4-5):411-430.
Iqbal, S., Zheng, X., and Bailey, B., 2004. Task evoked
pupillary response to mental workload in human
computer interaction. In Proceedings of Conference of
Human Factors in Computer Systems (CHI).
Izzetoglu, K., Bunce, S., Onaral, B., Pourrezaei, K., and
Chance, B., 2004. Functional Optical Brain Imaging
Using Near-Infrared During Cognitive Tasks.
International Journal of HCI, 17(2):211–227.
Jasper, H. H.. 1958. The ten-twenty electrode system of
the International Federation. Electroencephalographic
Clinical Neurophysiolgy, 10:371–375.
Joachims, T. (1999). Making Large-Scale SVM Learning
Practical, chapter 11.MIT-Press.
Jung, T., Makeig, S., Humphries, C., Lee, T., Mckeown,
M., Iragui, V., Sejnowski, T. (2000) Removing
Electroencephalographic Artifacts by Blind Source
Separation. Psychophysiology, 37(2):163-17
Jung, T.P., Makeig, S., Stensmo, M., and Sejnowski, T.J.,
1997. Estimating Alertness from the EEG Power
Spectrum. IEEE Transactions on Biomedical
Engineering, 4(1):60–69, January
Pleydell-Pearce, C.W., Whitecross, S.E., and Dickson,
B.T.. 2003. Multivariate Analysis of EEG: Predicting
Cognition on the basis of Frequency Decomposition,
Inter-electrode Correlation, Coherence, Cross Phase
and Cross Power. In Proceedings of 38th HICCS
Schmidt, F. and Thews, G. (editors) (1997). Physiologie
des Menschen. Springer
Smith, M., Gevins, A., Brown, H., Karnik, A., and Du, R.,
2001. Monitoring Task Loading with Multivariate
EEG Measures during Complex Forms of Human-
Computer Interaction. Human Factors, 43(3):366–380.
Tsochantaridis, I., Hofmann, T., Joachims, T., and Altun,
Y. (2004). Support Vector Machine Learning for
Interdependent and Structured Output Spaces. In
Proceedings of the ICML.
Vesanto, J., Himberg, J., Alhoniemi, E., and Parhan-
kangas, J. (2000). SOM Toolbox for Matlab 5.
Technical report, Helsinki University of Technology.
Zschocke, S. (1995). Klinische Elektroenzephalographie.
Springer
DETERMINE TASK DEMAND FROM BRAIN ACTIVITY
107
