
RoboAdmin: A Different Approach
to Remote System Administration
Marco Ramilli
1
and Marco Prandini
2
1
DEIS, Università di Bologna, Via Venezia 52
Cesena, Italy
2
DEIS, Università di Bologna, Viale Risorgimento 2, Bologna, Italy
Abstract. The most widespread approach to system administration consists in
connecting to remote servers by means of a client-server protocol. This work
analyzes the limitations of such approach, in terms of security and flexibility,
and illustrates an alternative solution. The proposed model eliminates the
predictable management port on the server by introducing an additional system,
placed in between the remote server and its administrator, which allows to
devise a management service behaving as a network client instead of a server.
While the focus of this work is placed on the alternative communication model,
whose effectiveness has been experimentally validated, the resulting
architecture can be seen as part of a larger picture, tracing a research path
leading to the definition of a novel administration framework, aimed at
overcoming many other issues of the current techniques.
1 Introduction
System administrators usually perform their tasks by connecting to a service allowing
to control a remote system like it were local: examples of these services encompass
the SSH daemon for Unix-like systems and various remote desktop solutions. This
approach is so "natural" for the average administrator that he/she usually does not see
its significant security and efficiency limitations. With this paper, we start a research
line hopefully leading to overcome two issues: first, the lack of flexibility provided by
the methods commonly available to the administrator for contacting the remote
server, and second the lack of expressiveness usually associated to the command and
control environment present on the server.
In this work, the focus is placed on the communication-related aspects, proposing
an alternative to the common client/server model. A service implementing the latter
kind of model has to listen to a known network port and to authenticate the incoming
connection attempts. In many cases, the service has to be reachable from
unpredictable locations, with standard client software; for this reason, implementing
protection mechanisms relying on network tools (such as packet filtering) or on
peculiar client capabilities (such as cryptography-based authentication) is not always
viable. Both brute force attacks against the remote administration service and attempts
at exploiting software/protocol vulnerabilities, then, must be considered possible.
Ramilli M. and Prandini M. (2007).
RoboAdmin: A Different Approach to Remote System Administration.
In Proceedings of the 5th International Workshop on Security in Information Systems, pages 43-52
DOI: 10.5220/0002427800430052
Copyright
c
SciTePress

Host- and network-based intrusion detection systems can help thwarting the attacks
before they succeed, but can not guarantee security against the vastly distributed
attacks that are presently possible, especially considering the value of the target (that
is full control of an Internet host).
The goal of this research is to devise an unconventional model of communication
between the system administrator and the remote administration interface. In the
proposed solution, the aforementioned vulnerability of the traditional scheme is
addressed by reversing the client-server relation; an administration engine replaces
the classical service, originating connections to an intermediate system instead of
listening for connections.
The immediate advantage arising from this design choice is that there is nothing to
attack on the remote host. On the other hand, the introduction of an additional system
in the security chain must be carefully evaluated, to avoid introducing unexpected
attack paths, and eventually making the system less robust than it originally was.
We claim that, if properly modeled and implemented, a platform based on the
meeting of the server and its administrator on an intermediate system is expedient in
terms of security, availability, usability and opportunity for future extension. This
paper illustrates the architectural details of the proposed model, analyzes the
implementation choices allowing to satisfy the security, efficiency and effectiveness
constraints, and discusses the experimental validation of the resulting system.
2 Design Concepts
A remote shell (see for example SSH [1]) is the most common tool for system
administration. The concept is simple, yet perfectly fit for the intended usage: through
a client-server protocol, a remote administration station accesses the same interpreter
locally used on the target system to impart commands and show their results.
However, the limitations deriving, on the one hand, from the inflexibility of the
communication protocol, and on the other hand from the imperative nature of the
shell, make this choice far from optimal. In the following, we will outline a quite
ample general framework for the development of an alternative model, subsequently
focusing on the solution of a particular issue.
2.1 The Vision
The ultimate goal of this line of research is that of modeling an autonomous agent,
able to receive external stimulations through a variety of channels, to judge the
context surrounding it, and eventually to process the requests expressed by the
administrators in the most appropriate fashion. Just like a real assistant, it should be
able to accept directions through the medium most suitable to the peculiar context
instead of being bound to a rigid communications protocol, and to network with other
similar entities to pursue the goal of the optimal overall system configuration.
Within the A&A reference model [2], it is possible to foresee RoboAdmin as an
autonomous computational entity, capable of self-determination; a proactive
component of a complex network, seeing the actual targets of its management actions
44

as artifacts [3]. The implementation of such an abstract and comprehensive concept,
in our opinion, is within the reach of the innovative yet well-established coordination
paradigms and technologies [4,5,6]. In this work, however, we will focus on a more
limited goal: the modeling and practical implementation of one aspect of the
illustrated vision, that is the substitution of the classical communication model with a
more flexible and secure one.
2.2 The Communication between the Server and its Administrator
The cited client-server protocol relies on the server part of the system to listen on a
known network port, which becomes the obvious target for attacks targeting either
protocol vulnerabilities or authentication weaknesses. Moreover, it often represents a
critical single point of failure, taking the system completely out of control in case of
problems.
The key concept of the proposed solution is abstracting the concept of remote
management port, with the aim of attaining both greater usage flexibility and higher
security. Instead of having a remote shell daemon passively listening for incoming
connections from the management stations, RoboAdmin is based on an active
management component, which connects to a meeting place (MP) where the
administrator can contact it. For this approach to be effective and efficient, the MP
has to satisfy the following properties:
I. not being an obvious entry point for the remote system
II. being easily reachable by the administrator
• by employing a standard protocol
• guaranteeing availability
III. supporting (possibly many layers of) authentication
IV. allowing the exchange of private information
Property (I) represents the key difference that the proposed model aims to achieve
over the standard network service model. One of the simplest approaches to the
problem of disguising the entry point for the remote system would be making the MP
difficult to find, but this choice would affect both legitimate administrators and
attackers; on the contrary, the abstract management port (AMP) has to be reachable at
some predictable location, as stated by property (II). Our proposal is to pursue this
goal by disguising the access point within a public, well-known MP, or better yet,
within a set of MPs. Disseminating AMPs over several MPs (all reachable by means
of the same, standard protocol) positively affects both the effectiveness of AMP
camouflage and the availability of the service.
2.3 Existing Technologies for Building Meeting Places
The concept of a meeting place satisfying the aforementioned properties and allowing
the instantiation of abstract management ports finds a quite natural mapping onto
peer-to-peer communication networks and chat channels. These systems provide
infrastructural support for the creation of places where people can meet. The name
given to the places can change across different implementations, and the scheme used
45

to reach them can vary from simple listings of places on a known server to complex,
distributed location services, but the main features are essentially the same for most of
the major platforms, i.e.:
• creation, publication and management of meeting places - the place is usually
created on a specific host, and can be made visible to a global or local network
through either a directory or a discovery system; it may be possible to transport the
place over a different host during its lifetime; an access control mechanism can be
available; administrative rights can be reserved to the creator of the place, shared
or delegated;
• identity management - users accessing the place are identified by means of a
nickname, which can either be independently chosen by them and disambiguated
by the system in case of collision, or registered a priori; in the latter case, they can
also be authenticated with a password; in any case, anonymity is the rule;
• public (broadcast) or private (one-to-one) communication - the main purpose of the
place is usually letting every logged user see what others write, but users can also
contact each other to start private conversations, restricted to a subset of the logged
users.
2.4 Use (and Abuse) of the Meeting Places by Non-human Players
While conceived for human-to-human communication, these systems have been the
target of software agents, commonly known as bots, since their early history. The
reasons for sending a bot in a meeting place are usually malicious [7,8]; they can
listen to the conversation between the real users, trying to extrapolate sensitive data,
or they can try to gain administrative rights for the meeting place. Research in the
Artificial Intelligence field produced some interesting results in its quest to devise a
software able to perform human-like conversation, thus passing the famous Turing
test [9]. This goal has been pursued though different approaches, some exploiting
clever but not really "intelligent" linguistic tricks [10], others building more complex
AI-based system with learning abilities [11]. In the year 1994, Maudin coined the
term chatterbot in its paper [12] describing the various conversational programs that
appeared at the time.
The results are still quite rudimentary when compared against the ambition of
convincingly mimicking a human conversation, yet they can be effectively fine-tuned
for the simpler purpose of dissimulating the real nature of a bot.
In the end, RoboAdmin can take advantage of the technologies illustrated in this
section and the preceding one, in order to implement an AMP in the form of a bot,
deployed on a MP represented by a chat room or channel.
3 System Architecture
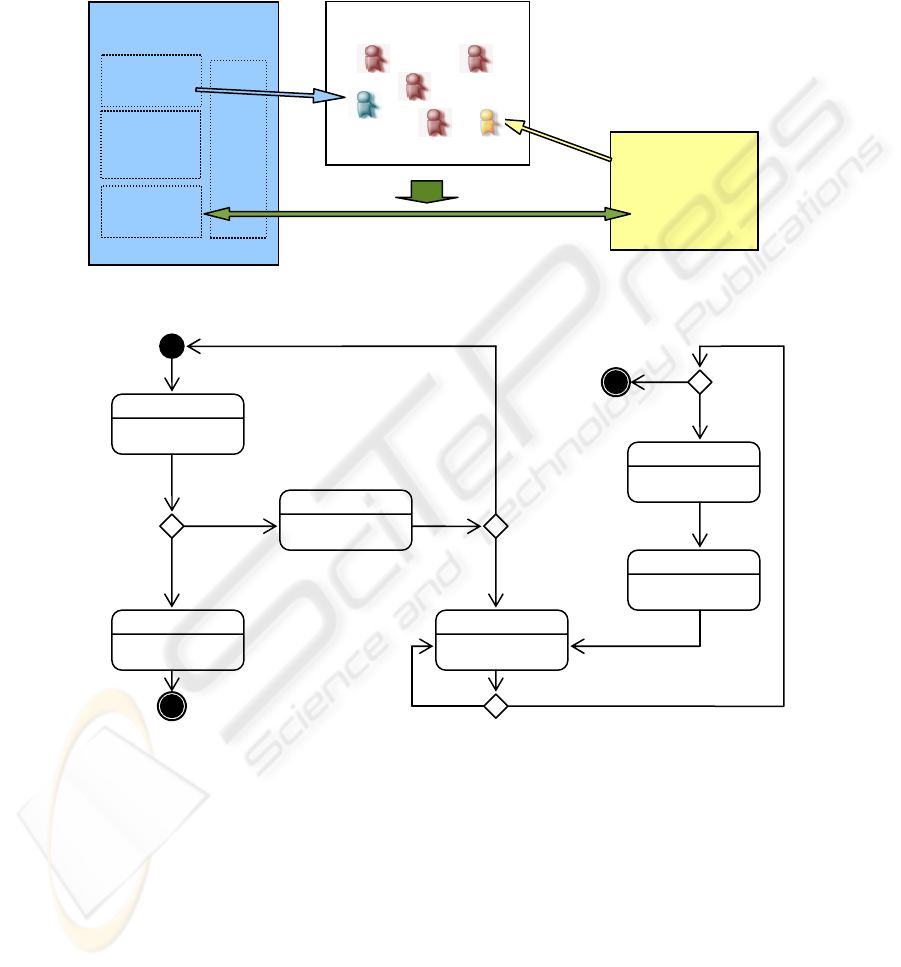
According to the model described in the previous section, the logical architecture of
RoboAdmin encompasses the four components depicted in Fig. 1. Their joint
operation can be modeled as a illustrated in Fig. 2, and synthetically described as
follows: a chatterbot on the server connects to the MP through a communication
46
layer; when an administrator contacts the chatterbot and properly completes the
authentication sequence enforced by an authentication module, the conversation is
redirected to a command interpreter, which is the actual management interface of the
server. In the following sections, the role and properties of each component is
examined in detail.
Fig. 1. RoboAdmin components and interactions with the MP.
Fig. 2. Input processing sequence executed by the chatterbot.
3.1 The Chatterbot
The role of the chatterbot is establishing an access point to the management port
within a meeting place. In order to satisfy the reachability property listed in section 2,
the chatterbot connects to one or more MPs known to the administrator, using
predefined identities.
server
chatterbot
authenti-
cation
module
command
inter
p
rete
r
communication
layer
Meeting Place
Administrator
Private channel
Waitin
g
command
Messa
g
e
User simulation
Authentication
Send Out
p
ut
Execute
Start
A
uthentication
Request?
Yes
No
Yes No
Right Command?
A
uthentication
Failure?
Yes
No
Logout?
No
Yes
End1
End2
<trigger>[<guard>]/<effect>
47

Once an administrator has met the chatterbot acting as the access point for a remote
server, he must provide proper authentication credentials in order to get access to the
command interpreter. The chatterbot has to be programmed to recognize the context
change, from the public section of the MP to a private communication channel, and
when this happens it starts looking for authentication tokens within the conversation.
Since a legitimate administrator has obviously no interest in chatting, the bot can
assume that a conversation beginning with any token different from an authentication
request is coming either from an unsuspecting real user or from an attacker.
Consequently, the chatterbot immediately leaves the pre-authentication state, and does
not enter it again unless the private channel is closed and opened again.
A combination of factors allows to attain the desired security advantage over the
classical, service-based approach:
• the chatterbot is programmed to behave as closely as possible like any human user;
finding a RoboAdmin chatterbot in a densely populated MP represents an
additional dimension in the search space for the potential brute-force attack.
• The server which sent the chatterbox out is unknown to the attacker. A real brute-
force attack (that is, against an account protected by a strong password) is time-
consuming and potentially traceable; it is usually driven by the motivation deriving
from the knowledge of the target value, which RoboAdmin hides.
• Unlike a remote service, which very often is the one and only practical point of
access to the server, RoboAdmin can send many chatterbots to different MPs, at
the same time, or in sequence, either mimicking the typical activity cycles of real
users or reacting to a problem that prevents correct operation on the current MP.
The advantage is twofold:
o the availability of the AMP is not tied to the correct working of a single MP;
o authentication failures can quickly trigger a locking-out reaction without
causing too much inconvenience. While a standard lock-out could prevent the
legitimate administrator from accessing its system, a chatterbot under attack can
easily be disabled and replaced with another instance, possibly active on a
totally different MP, with negligible impact on the legitimate administrator. In
this scenario, brute-force attacks, even leveraging the knowledge of the
authentication mechanisms by an adversary controlling the MP, can be very
effectively thwarted.
3.2 The Authentication Module
In order to keep the chatterbot platform-independent, the only authentication-related
function it performs is recognizing relevant tokens in the conversation and passing
them to the authentication module. This component performs two functions:
• essentially, it acts as a gateway towards the platform-specific authentication
infrastructure, like, for example, the system password verification library or an
LDAP directory;
• it can implement any authentication scheme that can sensibly take place as a text-
based, interactive protocol with a human administrator.
The locking-out policies and the consequent possible need for retracting a chatterbot
from a MP and sending a new one out are configured within this component.
48

3.3 The Communication Layer
As explained, the communication model of RoboAdmin can be mapped onto any
existing platform providing a few fundamental tools, namely:
• a public meeting place that can be unequivocally found on the Internet,
• support for establishing a private channel between users who met on the MP.
The specific protocol details are conveniently wrapped in a communication layer,
providing an abstract view of the basic communication primitives (connection,
message sending and receiving, etc.) to the chatterbot and the command interpreter,
and encapsulating the advanced functions that can be found in some platforms, like,
for example, authenticated access to the meeting places.
It is clearly possible to exploit different kinds of MPs at the same time, since the
communication layer hides the specific details to the other components of
RoboAdmin; the resulting AMP will exhibit an availability level greater than any
simpler network service, not only due to its intrinsic redundancy, but also because it
lowers the probability of seeing the administrator's client blocked by a firewall.
3.4 The Command Interpreter
After proper authentication, the command interpreter takes control of the interaction
with the administrator. Since providing some out-of-band control mechanism would
be uselessly cumbersome, this component must implement a logic for determining
whether a sentence written by the administrator represents a command directed to the
target system or intended for RoboAdmin. Its role, however, can reach well beyond
this simple task, allowing to define a standard interface whose functions are translated
into the appropriate actions on the target system. On platforms providing a complete
text-based administration environment, both goals can be easily achieved by simply
escaping shell commands, while on other platforms it may be necessary to provide a
more complex conversion between the text commands issued by the administrator and
calls to an administration API.
Eventually, both approaches can converge on a solution which presents a natural
language interface to the administrator, performing an "intelligent" conversion of the
abstract commands to whatever administration functions are found on the system. In
this case, the command interpreter could be built on the same technology used for the
chatterbot. Proposals for the implementation of a next-generation command-line
interface based on Jabber have been made a few years ago [13].
4 Implementation and Experimental Validation
The illustrated architecture can be implemented using a wide variety of technologies,
supporting almost any combination of target system (i.e. the one we want to remotely
administrate) and network infrastructure suitable for building an AMP.
I order to build a simple prototype for the experimental validation of the concept,
we chose to take advantage of the Internet Relay Chat (IRC) [14,15], an existing
network architecture which has been proven successful for a task very similar to ours,
49

albeit with very different intent: controlling infected hosts used for malicious
purposes [16].
IRC was probably the first service allowing people to meet on the Internet and
exchange text sentences in a many-to-many communications environment. It is still
widely used, notwithstanding the large number of alternatives now available, and
during its long history its has reached a very good level of stability and security. The
protocol is well documented and client software is available in many flavors, often
even on public-access network stations.
Regarding the target system, we implemented a command interpreter to wrap the
bash shell on a Linux machine.
4.1 Operation
RoboAdmin connects to an IRC server and joins a channel. The communications
layer component for this prototype can be easily configured to support both free-
access and password-protected channels. The conversation flowing in the channel is
continuously parsed by the chatterbot component, whose first task is determining
whether other users are trying to establish an administration session or, unsuspecting
of its nature, are simply approaching it to chat.
While the security of the system cannot rely on the effectiveness of RoboAdmin at
disguising itself, it is useful to make its presence in a channel less obvious. For this
purpose, the prototype exhibits a rudimentary intelligent behavior, implemented as a
Prolog theory. In detail, we designed two sets of clauses on the TuProlog platform [5],
the first one (d_c) coding "known questions" and the second one (d_n_c) coding
"unknown questions", thus implementing an effective "change of subject" pattern
structured as follows:
d_c([<expected_question>|T], [<related_answer>|O]):- !, d_c(T, O).
d_n_c([_], "<escape_sentence>").
where
<expected_question> represents a string known to RoboAdmin
<related_answer> represents a plausible follow-up to <expected_question>
<escape_sentence> represents a plausible formula for terminating the conversation
after the reception of an unrecognized sentence [_]
When the authentication module recognizes a valid attempt at switching to the
command mode, and is able to correctly authenticate the administrator, the command
interpreter takes control. It is implemented as a standard interpreter of the language
defined by a completely configurable grammar, taking advantage of the existing tools
for the Java language allowing to automatically derive the interpreter from the
grammar definition. The following is an example of grammar defining some meta-
commands directed at RoboAdmin; some of the commands can directly trigger the
execution of the included shell code on the server:
<TOKEN>::=“REGISTER”|“IDENTIFICATION”|“IDENTIFY”|“EXIT”
|“ABOUT”|“JOIN”|“SERVER&CHANNEL”|“REPEAT”|“EXECUTE”
<SH-C> ::= {<<shell_command>>}
<COMMAND> ::=!<TOKEN>! <SH-C>
50

4.2 Preliminary Experimental Results
The prototype has been running on a public host for six months, without incidents so
far. It connects to a public IRC server, where the chatterbot actually got contacted by
many other users, who rather quickly lost interest in its limited conversational ability,
but apparently did not discover its real nature.
It is still too early for drawing conclusions, but at least it is possible to say that,
until now, the prototype always correctly performed the job it was designed for.
5 Conclusions
The aim of this work was essentially that of starting a novel line of research regarding
the problem of remote system administration, with an approach balancing theory and
practice. For this reason, we worked on two parallel tracks: following the first track,
we laid out a very high-level vision of what could be a framework for developing
secure, autonomous agents assisting the system administrators in their efforts.
Following the second track, we simplified the concepts of the high-level model
enough to implement them in a working prototype, that could at least prove the
feasibility of some solutions.
The result is a "bot" capable of disguising its presence within an IRC channel, and
of acting as an intermediary between an administrator and a common Unix shell. The
security of this realization of the Abstract Management Port concept relies on various
factors: the difficulty of finding the bot and of associating it to a specific server, the
(standard) difficulty of impersonating a legitimate administrator, and the much more
effective anti-brute-force measures that can be put in place.
The main concerns, not yet addressed in the current implementation, regard passive
authentication protocols. Of course it is not possible to use a passive authentication
protocol within a public channel; the possibility of adopting human-computable active
authentication protocols could overcome this problem, allowing to introduce
additional security measures, the most notable being mutual authentication. In fact, a
significant risk is posed by attackers mimicking a RoboAdmin chatterbot with the
intent of stealing the authentication tokens from the administrator.
Among the functionalities that we plan to add in the short term, we deem very
interesting the possibility of creating private group chat-rooms, where an
administrator could manage a whole cluster of servers with a single command. In the
long term, however, the main goal remains the definition of the theoretical
framework, occasionally accompanied by experimental validation of specific
components.
References
1. T. Ylonen, C. Lonvick, Ed. (S. Lehtinen): RFC 4250-54: The Secure Shell (SSH) Protocol
series, http://www.rfc-editor.org/, January 2006
2. Andrea Omicini, Alessandro Ricci, and Mirko Viroli. Coordination artifacts as first-class
abstractions for MAS engineering: State of the research. In Alessandro F. Garcia, Ricardo
51

Choren, Carlos Lucena, Paolo Giorgini, Tom Holvoet, and Alexander Romanovsky,
editors, Software Engineering for Multi-Agent Systems IV: Research Issues and Practical
Applications, volume 3914 of LNAI, pages 71–90. Springer, April 2006. Invited Paper.
3. Ambra Molesini, Andrea Omicini, Enrico Denti, Alessandro Ricci: "SODA: a Roadmap to
Artefacts" in Engineering Societies in the Agents World VI (O. Dikenelli, M. Gleizes, A.
Ricci, Eds.), Lecture Notes in Artificial Intelligence, Vol. 3963, June 2006, 49--62,
Springer
4. Andrea Omicini, Enrico Denti, Formal ReSpecT, in Declarative Programming - Selected
Papers from AGP'00 (A. Dovier, M. Meo, A. Omicini, Eds.), Electronic Notes in
Theoretical Computer Science, Vol. 48, 179--196, Elsevier Science B. V.
5. Enrico Denti, Andrea Omicini, Alessandro Ricci, tuProlog: a Light-weight Prolog for
Internet Applications and Infrastructures, in Practical Aspects of Declarative Languages (I.
Ramakrishnan, Editor), Lecture Notes in Computer Science, Vol. 1990, 184--198, Springer
6. A. Omicini, F. Zambonelli, Coordination of Mobile Information Agents in TuCSoN,
Internet Research 8(5), 1998. MCB University Press.
7. Barnett, S. (2005). The IT crimewave. The Journal, 50(7), Lemos, R. (2003). Attack bot
exploits Windows flaw. Retrieved Nov. 26, 2005, from News.com Web site:
http://news.com.com/2100-1009-5059263.html.
8. Schluting, C. (2005). Botnets: Who Really "0wns" Your Computers?. Retrieved Nov. 26,
2005, from http://www.enterprisenetworkingplanet.com/netsecur/article.php/3504801.
9. A.M. Turing, "Computing Machinery and Intelligence," Mind, vol. LIX, no. 236, 1950, pp.
443-460.
10. A.L.I.C.E. (Artificial Linguistic Internet Computer Entity) - http://www.alicebot.org/
11. Jabberwacky - http://www.jabberwacky.com/
12. Michael L. Mauldin, Chatterbots, Tinymuds, And The Turing Test: Entering The Loebner
Prize Competition, Proc. AAAI-94, Seattle, Washington
13. DJ Adams, Is Jabber's Chatbot the Command Line of the Future? -
http://www.openp2p.com/pub/a/p2p/2002/01/11/jabber_bots.html
14. J. Oikarinen, D. Reed, Internet Relay Chat Protocol, RFC1459, May 1993 - http://www.rfc-
editor.org/
15. C. Kalt, Internet Relay Chat series, RFC2810-13, April 2000 - http://www.rfc-editor.org/
16. Canavan, J. The Evolution of Malicious IRC Bots, White Paper, Symantec Security
Response, 2005. - http://securityresponse.symantec.com/avcenter/reference/
the.evolution.of.malicious.irc.bots.pdf
52
