
ON CORRECTNESS CRITERIA FOR WORKFLOW
EXCEPTION HANDLING POLICIES
Belinda M. Carter and Maria E. Orlowska
School of Information Technology and Electrical Engineering, University of Queensland, Australia
Keywords: Workflow, exception handling, verification, correctness criteria, event-driven business process
management.
Abstract: Exception handling during the execution of workflow processes is a frequently addressed topic in the
literature. Exception handling policies describe the desired response to exception events with respect to the
current state of the process instance in execution. In this paper, we present insights into the definition and
verification of such policies for handling asynchronous, expected exceptions. In particular, we demonstrate
that the definition of exception handling policies is not a trivial exercise in the context of complex
processes, and, while different approaches to defining and enforcing exception handling policies have been
proposed, the issue of verification of the policies has not yet been addressed. The main contribution of this
paper is a set of correctness criteria which we envisage could form the foundation of a complete verification
solution for exception handling policies.
1 INTRODUCTION
Workflow technology is ideal for supporting highly
repetitive and predictable processes. However, many
processes are faced with the need to deal with
exceptional situations that may arise during their
execution (Casati 1999). Workflows may be affected
by different types of exceptions: system failures such
as hardware and software crashes and logical
failures or exceptions. Logical failures refer to
application-specific exceptional events for which the
control and data flow of a workflow is no longer
adequate for the process instance (Müller, et al
2004). Many logical failures may be unexpected, and
these must be handled manually on an ad hoc basis
by knowledge workers. However, many exceptions
are expected – the inconsistencies between the
business process in the real world and its
corresponding workflow representation can be
anticipated, even if they might not be frequent
(Casati and Pozzi 1999). That is, workflows describe
the ‘normal behaviour’ (forming the ‘core’) of a
process whereas expected exceptions model the
‘occasional behaviour’.
Expected exceptions can be synchronous with
respect to the flow of work, but most often they are
asynchronous – that is, they can be raised at an
arbitrary stage of the process, potentially during a
long-duration activity (Casati and Pozzi 1999).
Cancellations of customer orders and car accidents
during a rental process are examples of
asynchronous events.
In some applications, there may be one standard
desired response to the occurrence of such an
exception event, regardless of the execution state of
the underlying process instance. However, in most
real world scenarios, the required reaction to these
events depends on the data associated with the
relevant process instance (that is, its execution state).
As discussed in the next section, a myriad of
exception handling approaches exist, each with its
own expressivity, syntax and visual representation.
However, regardless of the approach that is adopted,
exception handling, in essence, still constitutes the
enforcement of a set of exception handling rules
defined in terms of the state of the process instance.
Exceptional situations are usually very
complicated (Luo, et al 2000) and we argue that it is
very easy to define policies that may produce
unintended execution behaviour. However, while
most authors are fast to claim that exception
handling is complex, and it is well known that the
analysis of rules in general is non-trivial, little
attention has been paid to the issue of verification of
these rules. This issue is glossed over in the
literature, so we attempt to address it in this paper.
The focus of this paper is on the definition and
verification of policies for handling expected
315
M. Carter B. and E. Orlowska M. (2007).
ON CORRECTNESS CRITERIA FOR WORKFLOW EXCEPTION HANDLING POLICIES.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - DISI, pages 315-322
DOI: 10.5220/0002374303150322
Copyright
c
SciTePress

exceptions that are based on external events that
occur asynchronously with respect to the process.
The policies make reference to the ‘state’ of the
process instance, and, while there are multiple
dimensions to this notion, we argue that two of these
are common to many and indeed completely satisfy
a large proportion of exception handling cases – the
position of the process instance with respect to the
process model (i.e. the currently executing
activities), and the values of associated case data.
And regardless of the particular exception handling
approach that is adopted, this business logic must be
captured and then processed at runtime.
Since this logic relates directly to the business
itself, validation of the exception handling policies is
largely a semantic issue to be performed by a
domain expert and thus cannot be automated.
However, we argue that there are some common
principles of a generic nature that should be
observed in order to perform the first step towards
verification of the rules in an automated manner.
In the following sections, we summarize the
related work, then present an introduction to the
basic principles of workflow specification and
execution. We introduce the notion of an exception
handling policy and illustrate the concept with a
simple but meaningful example. We then describe a
set of generic properties that should be satisfied in
order to ensure the ‘correctness’ of the policy. We
conclude with an outlook for future research.
2 RELATED WORK
Exception handling is not a new concept, and has
attracted considerable attention in the literature.
Many approaches for flexible process enforcement
have been proposed. The first approach is to encode
the entire workflow process as a set of rules, thereby
ensuring complete flexibility. For example (Bae, et
al 2004) and (Kappel, et al 1997) present approaches
where the process is described through a set of
Event-Condition-Action (ECA) rules (c.f. (Widom
and Ceri 1996)). However, while processes encoded
through rules enable all predefined behavior to be
enforced, it is well known that large sets of rules can
interact in unknown ways (e.g. (Widom and Ceri
1996)). The importance of ensuring correctness of
the process model before deployment has been
emphasized in (Sadiq and Orlowska 2000b).
As already noted, this paper primarily addresses
the issue of policy definition for handling expected
exceptions that are based on external events that
occur asynchronously with respect to the process.
(Readers are referred to (Mourão and Antunes 2004)
for a framework to support ad hoc interventions
when dealing with unexpected exceptions.) Ess-
entially, there are two approaches for incorporating
exceptional cases into a process model – ‘exception
rules’ and ‘exception workflows’ (Sadiq and
Orlowska 2000a). The first approach is to implement
exceptions through an explicit exception rule base.
Each exception is modelled by an ECA rule, where
the event describes the occurrence of a potentially
exceptional situation, the condition verifies that the
occurred event actually corresponds to an exception
that must be managed, and the action reacts to the
exception (Casati 1999). A different approach is
presented in (Müller, et al 2004) where the core pro-
cess is dynamically modified at run-time based on a
set of rules – when exceptional events occur during
process execution, the AgentWork system identifies
the workflow instances to be adapted, determines the
change operations to be applied, and automatically
performs the change for those instances.
Alternatively, exceptions can be modelled as
workflow processes themselves (Sadiq and
Orlowska 2000a). This approach is taken in (Adams,
et al 2005), which introduces the notion of Worklets,
which are ‘an extensible repertoire of self-contained
sub-processes and associated selection and exception
handling rules’. Choosing the most applicable
worklet to be executed in response to an exception is
achieved by evaluating conditions that are associated
with each worklet. These conditions are defined
using a combination of current data attribute values
and the current state of each of the worklets that
comprise the process instance. It was noted that the
set of states for a worklet-enabled process may be
deduced by mining the process log file (c.f. Aalst, et
al 2003) but that full exploration of the specification
of such conditions is yet to be completed.
Another approach is to consider the exception
handling processes as sub-processes within the core
process. In the ‘event node approach’ discussed in
(Casati 1999), the workflow model includes a partic-
ular type of node, called an event node, which is
able to observe asynchronous events and to activate
its successor in the workflow graph when the event
is detected. However, once again, it was noted that
upon observation of an event, conditions ‘can be
used to select, among several exception management
alternatives, the most adequate to deal with the
current workflow state’ (Casati, et al 1999). The
complexity of defining such conditions was briefly
emphasised in (Carter and Orlowska 2007) but the
issue of definition and verification of exception
handling policies has not yet received adequate
attention in the literature.
ICEIS 2007 - International Conference on Enterprise Information Systems
316

3 BACKGROUND OF
WORKFLOW SPECIFICATION
AND EXECUTION
Before we discuss exception handling, let us first
briefly summarize the basic principles of workflow
specification and execution that are required for the
subsequent discussion. A workflow management
system (WFMS) is a system that completely defines,
manages, and executes workflows. Before a
workflow process can be enacted, it must be
specified to reflect the process requirements. The
process model describes the order of execution of
tasks according to the business policies and
resource/temporal constraints. Each task (activity) is
a logical unit of work within a process that may be
either manual or automated but performed by a
single workflow participant.
The workflow model (W) is defined through a
directed acyclic graph (DAG) consisting of nodes
(N) and flows (F). Flows represent the control flow
of the workflow. Thus, W = <N, F> is a directed
graph where N is a finite set of nodes, and F, F ⊆ N
× N, is a flow relation. Nodes are classified into
tasks (T) and coordinators (O), where O ∪ T = N
and O ∩ T = ∅. Furthermore, we assume that the
model is structurally correct (free from deadlocks
and potential lack of synchronisation) according to
the correctness criteria proposed in (Sadiq and
Orlowska 2000b) for the purposes of this paper.
In this paper, we will adopt graphical process
modelling notation whereby rectangles represent
tasks, and forks and synchronizers (concurrent
branching constructs), and ovals represent choices
and merges (alternative branching constructs).
Let a workflow graph W = <N, F> be given.
A Process Instance (PI) is a particular
occurrence of the process. Let I
W
= {i
W
1
, i
W
2
, …, i
W
g
}
represent the set of all instances of the process W.
Note that for a commercial WFMS, g is likely to be
in the order of hundreds of thousands.
For readability and simplicity of presentation, we
consider one process so omit W as an index for all
terms defined below (without loss of generality).
Each process instance is associated with three
types of data. During process execution, the WFMS
maintains internal Control Data that includes the
internal state information associated with the
execution of activities in the process. There are also
two types of data that flow between activities.
Workflow Application Data is manipulated directly
by the invoked applications. Workflow Relevant
Data (also known as ‘Case Data’), is the only type
of application data accessible to the WFMS, and can
be thought of as a set of global variables.
Data Items. Let D be the set of data variables
{d
1
, d
2
, …, d
q
} that are required as input to one or
more nodes in T in order to execute instances of the
process described by W. We refer to d
k
, k = 1…q, as
the Data Items for W.
Data Values. Corresponding to each data item d
k
∈ D is a set V
k
, k = 1…q called the Data Values for
d
k
. and denoted values(d
k
). The data values are
arbitrary, nonempty finite or countably infinite sets.
Let V = V
1
∪ V
2
∪ … ∪ V
n
.
The value for each data item d ∈ D can be given
at process instantiation or generated during process
execution. Let D
n
⊆ D represent the set of data items
for which values are produced by node n ∈ N.
(Aside: In practice, all nodes that produce data
values will be activities.)
Time. A discrete time base is assumed such that t
∈ ℑ denotes a time point where ℑ is isomorphic with
the set of natural numbers.
Case Data. Let Z
i
(t) ⊂ D × V be the workflow
case data for PI, i ∈ I at time t such that
∀
(d
k
, v
j
) ∈
Z
i
(t), v
j
∈ (values(d
k
) ∪ NULL), and
∀
(d
k
, v
j
), (d
l
,
v
m
) ∈ Z
i
(t), d
k
= d
l
→ v
j
= v
m
. The data values can be
given at process instantiation or generated during
process execution. The NULL value indicates that
the data value has not (yet) been generated for a data
item for i at time t.
Data Condition. Let C be the set of first order
predicate expressions defined on the case data. That
is,
∀
c ∈ C, i
∈
I, t ∈ ℑ, c(Z
i
(t)) ∈ {True, False}. We
refer to each c ∈ C as a Data Condition. Data con-
ditions may reference one or more data items/values.
Generally, there will be minor variations in the
way in which different PIs are to be enacted.
Specifically, not all of the activities in the process
model will necessarily be relevant for every PI.
Choice coordinators allow these variations to be
represented in the same process model – a data con-
dition c ∈ C is associated with the outgoing flow of
each choice node, and the associated flow is taken
for a process instance i ∈ I if and only if c(Z
i
(t)) =
True at the time t at which i reaches the choice
construct during its execution.
Process Instance Type (PIT). We call a class of
PIs that execute the same set of tasks during their
complete execution a Process Instance Type (PIT).
Let {I
1
, I
2
, …, I
r
} be a partition of I that represents
the set of PITs associated with W. Corresponding to
each PIT I
k
,
∀
k = 1…r, is a set of data conditions C
k
⊂ C that are associated with the choice paths taken
by all instances i ∈ I
k
. This set of data conditions
uniquely identifies each PIT.
Since case data may be either given at process
instantiation or generated during process execution,
it is possible that at time t during the execution of an
ON CORRECTNESS CRITERIA FOR WORKFLOW
317

instance i ∈ I, the PIT of i is not yet determined.
However, it must have been determined prior to
completion of the process. Also, at time t during the
execution of a WFMS (and indeed, during the
lifetime of the system), it is possible that no PIs
corresponding with one or more PITs have (yet)
been facilitated, because one or more choice paths
have not (yet) been taken – this depends entirely on
the case data associated with the PIs that have been
enacted by the system.
Process Instance Graph (PIG). Corresponding to
each PIT I
k
is a workflow graph W
k
= <N
k
, F
k
>
where N
k
⊆ N, F
k
⊆ N
k
× N
k
called the Process
Instance Graph (PIG) for I
k
. This graph W
k
is a
structurally correct workflow graph that represents
the exact process that is performed by all instances
of the PIT I
k
. Therefore, choice coordinators are not
present in any PIG (and since the models are
assumed to be structurally correct according to the
criteria presented in (Sadiq and Orlowska 2000b),
merge coordinators are also excluded from PIGs).
The set of PIGs is known at ‘design time’, prior to
the introduction of any process instances into the
WFMS. The original process model W can be
reconstructed from all PIGs {W
1
, W
2
, … W
r
} and the
data conditions {C
1
, C
2
, … C
r
} associated with each
of the corresponding instance types {I
1
, I
2
, … I
r
}.
There are two PIGs in the workflow graph depicted
in Figure 1. The tasks associated with the PIG
identified through condition c
1
are shaded.
Due to parallel branching structures, multiple
tasks may be executing concurrently for any PI.
Information about currently executing tasks is
maintained as part of the Control Data.
Process Instance Position (PIP). Let P = {T
1
, T
2
,
…, T
s
} where ∀ b = 1…s, T
b
⊂ T, be the set of sets
of tasks that may be executing concurrently at any
point in time if the correct semantics of all workflow
modeling constructs in W are observed. We call P
the set of Process Instance Positions (PIPs) for W.
Note that since each PI i ∈ I executes a single PIG
W
k
, it follows that T
b
⊆ N
k
,
∀ b = 1…s. Furthermore,
the flow relation F
k
enforces ordering constraints
between all nodes n ∈ N
k
, so ∀ n
1
, n
2
∈ T
b
, n
1
is not
reachable from n
2
through F
k
, and vice versa.
Clearly, not every combination of tasks is a PIP.
For example, for the process model depicted in
Figure 1, the PIPs are: (1), (2, 4), (3, 4), (2, 5, 6), (2,
5, 7), (2, 8), (3, 5, 6), (3, 5, 7), (3, 8), (2, 9), (2, 10),
(3, 9), (3, 10) and (11). Note that the set of tasks (2,
4, 9) is not a PIP since these tasks will never be
active at the same time due to the choice construct in
the process model.
Figure 1: Example Process Model for Discussion.
e say that a node n ∈ N is prior to (‘<’) a PIP P
∈ P if n is prior to any node m ∈ P, that is, (n, m) ∈
F* where F* is the transitive closure of F.
Let
Τ
be a function: I × ℑ → P that returns the
set of currently executing tasks P ∈ P for process
instance i ∈ I at time t ∈ ℑ.
Process Instance State (‘State’).
We will refer
to the combination of PIP and case data for a PI i ∈ I
at time t
as its state.
With this background, we now introduce the
concept of exception handling policies.
4 EXCEPTION HANDLING
POLICIES
Exception handling behavior depends on the
underlying business requirements. Due to the costs
associated with manual exception handling, this
behaviour should be automated whenever possible.
Before the system can automatically react to
exception events, the desired exception handling
behaviour must first be captured and encoded in a
format that the system can interpret (similar to a
process model for the core process). Each exception
event has an associated ‘Exception Handling Policy’
that describes the desired reaction if the exception
event is observed while the PI is in various
execution states. In this section, we formally
introduce the notion of an exception handling policy.
Assume the workflow graph W as introduced in
the previous section is given. All introduced
concepts correspond to W, unless otherwise noted.
Events. Let E be the set of all Events related to W
for which exception handling policies are to be
defined.
Actions. Let A be the set of all Actions to be
performed in order to ‘handle’ each of the events e
∈ E if and when they occur, as dictated by the
business requirements. Each of these actions can be
rep-resented through a process model, but definition
of these models is outside the scope of this paper.
2
3
Choice
1
4 5 8 11Merge
c
2
6
7
9
10
c
1
ICEIS 2007 - International Conference on Enterprise Information Systems
318
For a given event e ∈ E, an Exception Handling
policy associates an action a ∈ A with each PI state
(that is, combination of PIP and the case data).
Exception Handling Policy. Let
e
Δ : S
e
→ A be a
function where S
e
⊆ P
× C. We call
e
Δ the Exception
Handling Policy (‘Policy’) for each event e ∈ E.
Each Policy Rule (‘PR’) for each e
∈
E identifies an
action a ∈ A to be performed (P, c)
→ a iff e is
observed at time t during the execution of PI i
when
Τ
(i, t) = P and c(Z
i
(t)) = True.
Note that
∀
(P, c) ∈ S
e
, (P, c) represents a set of
process instance states. We say that a data condition
c∈ C is ‘associated with’ a PIP P ∈ P
iff (P, c) ∈ S
e
.
When an exception event e is observed during the
execution of a process instance i at time t, the system
must retrieve the relevant exception handling
policy
e
Δ . Then, a query must be executed on the
control data to determine the current PIP of i, that is,
P =
Τ
(i, t), and then to retrieve the set of PRs for P
from the policy. If there is one PR for P, the
associated action is to be performed. If there are
multiple PRs for P, each data condition associated
with P is to be evaluated against the case data for i
until a satisfied condition is found, at which point
the action associated with the satisfied condition is
to be performed.
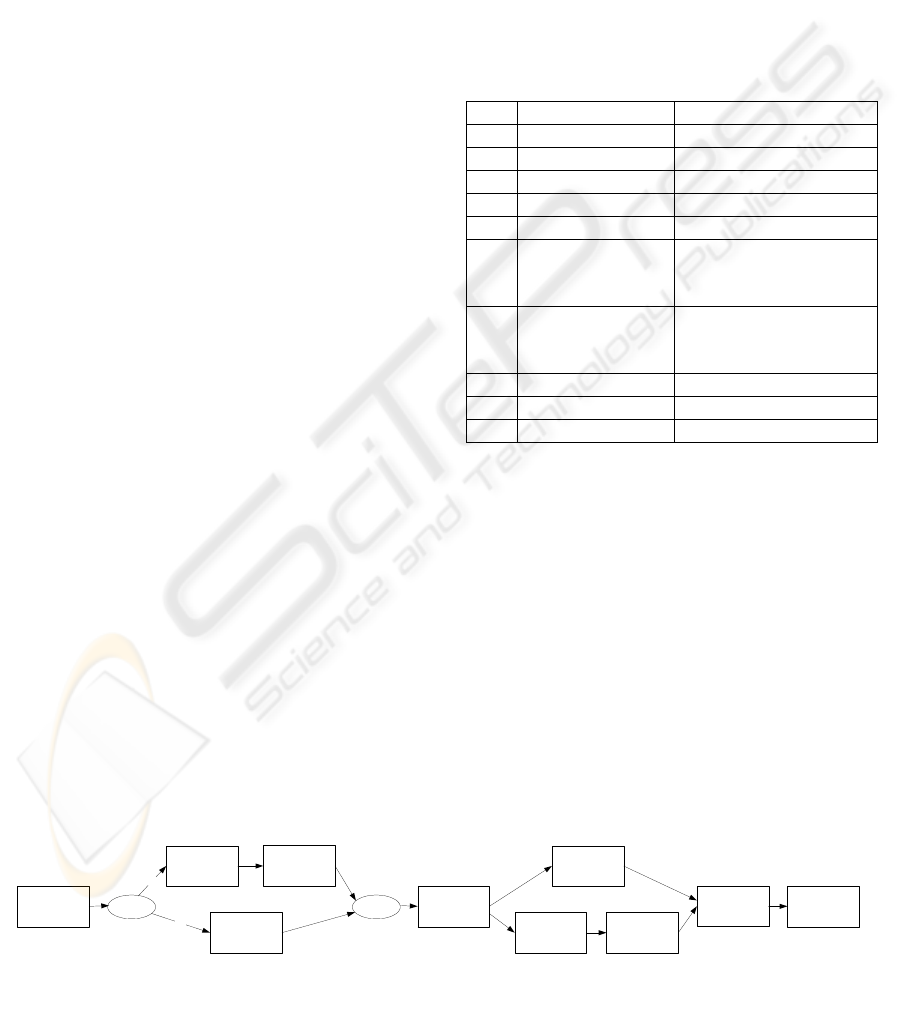
5 EXAMPLE
We now illustrate the notion of an event handling
policy with a simple but meaningful example.
Consider the ‘just in time’ ordering process for
computer systems, depicted in Figure 2. (Note that
tasks are numbered for reference purposes only.)
Consider that e ∈ E represents a cancellation of
the order. The process has one data item: Type, such
that values(Type) = {‘A’, ‘C’}, that represent an
account purchase and a credit card purchase,
respectively. The value for Type is given at process
instantiation (i.e. it comes with the order). Two data
conditions are relevant: c
1
: Type = ‘A’, c
2
: Type =
‘C’. (We assume here that the account and credit
card debits are approved for the sake of illustration.)
The business would like to enforce that the
process can only be cancelled if the assembly of the
system has not yet started, because they are unable
to return goods once the packaging has been opened.
If cancelled before that point, the core process
should be halted, the hardware and software
procurement semantically compensated for (if
applicable), and the payment refunded – that is,
either an account credit or a credit card refund
issued. If received after this point, the cancellation is
to be rejected. The policy for e could thus be defined
as presented in Table 1. Note that the set of actions
includes the following: A1: Issue Account Credit,
A2: Issue Credit Card Refund, and A3: Reject
Cancellation. Each row of the table represents a PR.
Table 1: Example Policy for Order Cancellation.
PIP Data Conditions Action
2 Type = ‘A’ Cancel 2
3 Type = ‘A’ Cancel/Compensate 3
4 Type = ‘C’ Cancel/Compensate 4
5 Type = ‘A’ Cancel 5 and Perform A1
5 Type = ‘C’ Cancel 5 and Perform A2
6, 7 Type = ‘A’ Cancel/Compensate 6,
Cancel/Compensate 7, and
Perform A1
6, 7 Type = ‘C’ Cancel/Compensate 6,
Cancel/Compensate 7, and
Perform A2
6, 8 Type = ‘A’ or ‘C’ Peform A3
9 Type = ‘A’ or ‘C’ Peform A3
10 Type = ‘A’ or ‘C’ Peform A3
Note that the control data must be inspected at a
finer level to determine how much compensation is
required (if any) for tasks, depending on the progress
that has been made through their execution at the
time the exception occurs. Now let us consider the
verification of the defined policies.
6 CORRECTNESS OF
EXCEPTION HANDLING
POLICIES
Verification of process models prior to deployment
is essential in order to detect potentially costly
erroneous execution situations before they arise
(Sadiq and Orlowska 2000b). Due to the
Choice
1. Receive
Order
5.
Decompose
Order
9. Install
Software
10. Pack and
Dispatch
4. Debit
Credit Card
Merge
c
2
2. Approve
3. Debit
Account
c
1
7. Procure
Hardware
6. Procure
Software
8. Assemble
System
Figure 2: Ordering Process Example.
ON CORRECTNESS CRITERIA FOR WORKFLOW
319

combinatorial explosion of PITs, it is inherently
difficult to reason about the correctness of complex
processes.
Just as it is possible to define processes that are
erroneous according to specific correctness criteria,
it is possible to define policies that can be
determined to be erroneous prior to system
deployment. And although exception handling is a
peripheral issue to the enactment of the core process,
it is equally important that exception handling
policies be verified. Due to the infrequency of
exception handling behaviour, it is perhaps even
more important to verify the policies, because many
months or even years may pass before particular
situations arise for the errors to be detected. In this
section, we introduce and describe the correctness
criteria for exception handling policies.
Since the exception handling logic relates
directly to the business itself, validation of the
exception handling policies is largely a semantic
issue to be performed by a domain expert and thus
cannot be automated. However, we argue that there
are two essential and two desirable properties of
‘correct’ exception handling policies. These generic
properties for the correctness of a policy definition
can be automatically verified as a precursor to
semantic validation.
The essential requirements are
• Deterministic Behaviour, and
• Data Availability.
The desirable properties are
• Completeness, and
• No Redundant Rules.
While the expressiveness of the languages used
to describe the policies and the particular modeled
application domains may differ, we argue that these
requirements should be observed. To our
knowledge, no previous work has focused on the
verification of the policies in this way. We will now
introduce each of the correctness criterion in turn.
6.1 Deterministic Behaviour
The first correctness criterion for exception handling
policies is that they must produce deterministic
exception handling behaviour such that if an
exception event is observed, the behaviour of the
system can be determined based on the PIP and case
data of the associated PI only.
Practically, this means that in a policy for a
given event, the set of data conditions associated
with each PIP (that is, across all PRs) must be
mutually exclusive. That is,
∀
e ∈ E, P ∈ P, c
1
∈ C,
c
2
∈ C such that (P, c
1
) ∈ S
e
and (P, c
2
) ∈ S
e
, if ∃ i
∈ I, t ∈ ℑ
such that
Τ
(i, t) = P and c
1
(Z
i
(t)) = True
and c
2
(Z
i
(t)) = True then c
1
= c
2
.
For example, if <2, Type = ‘A’, Cancel Approval
Request> is a PR then <2, Type = ‘A’, Perform A3>
is not a valid PR. If multiple actions are to be
performed then they should be combined in one PR.
The effect on system behaviour resulting from a
violation of this property depends on the specific
implementation. In the best case scenario, the entire
set of ‘triggered’ actions will be performed each
time. Another possibility is that only one action is
performed, but it is the same action each time.
Whether this behaviour is correct is debateable, and
the policy definition is not an accurate source of
process knowledge in any case, but consistent
behaviour would be observed. In the worst case, one
action could be arbitrarily selected each time, which
would result in inconsistent system behaviour that
may remain undetected indefinitely. Another
possibility is complete process or system suspension.
6.2 Data Availability
Data availability is a requirement for correct process
execution. The problems associated with ‘missing
data’ were discussed in (Sadiq et al 2004) in the
context of execution of the ‘core’ business process.
Specifically, it was noted that a data item (value)
must be produced in a node of the graph prior to
each node (that is, an activity or a choice node) that
requires that data item (value) in order to execute.
This natural requirement extends to exception
handling. During execution, data conditions must be
evaluated only to resolve conflicts in order to
determine which exception handling action to
perform if multiple actions are defined for one PIP.
Therefore, for any such PIPs, the data that is
required in order to evaluate all associated data
conditions need not be given at process instant-
iation, but must be generated during the execution of
the process by the time the PI reaches that PIP.
That is, data availability requires that
∀
e ∈ E,
∀
(P, c) ∈ S
e
where P ∈ P, c ∈ C, the values for all
data items referenced in c must be generated in a
node that is prior to P. Therefore, the following must
hold if all required data is available during exception
handling:
∀
e ∈ E,
∀
(P, c) ∈ S
e
where P ∈ P, c ∈
C, ∀ d ∈ D
such that d is referenced in c, ∃ n ∈ N
such that d ∈ D
n
and ∃ m ∈ P such that n < m.
In our example, the only data item referenced in
the policy rules is Type and its value is given at
process instantiation, so all data is available.
The consequences of unavailable data depend on
the implementation. If the values are ‘NULL’ for all
items on instantiation (as implied in this paper), then
unanticipated condition evaluation results may result
in incorrect exception handling. However, if the
actual data items themselves are created during
execution, system suspension is a likely outcome.
ICEIS 2007 - International Conference on Enterprise Information Systems
320

6.3 Completeness
On occurrence of a particular event e ∈ E during the
execution of a PI,
e
Δ is consulted to determine the
exception handling action to be performed for the PI,
according to its current state. However, there may be
some application scenarios whereby there are no
actions to be performed on observation of an event
for particular states of the PI in execution. It may be
natural to think that no PRs should be defined for
these states.
However, we argue that a thorough consideration
of all possible states for a PI during the definition of
exception handling policies is a complex task. It is
therefore plausible and perhaps even likely that
process designers may inadvertently omit one or
more states when defining policies. A case could
thus be made for requiring the definition of a PR for
all such states with a corresponding action of ‘No
Action’, in order to make it explicit that all states
were indeed considered during the definition of the
policy but that exception handling behaviour is not
required in particular situations. This would help to
ensure that the exception handling policies are an
accurate and complete source of ‘process
knowledge’, making it easier to understand and
ultimately maintain the policies.
We therefore propose that such practices be
recommended. However, while implementation-
specific issues are outside the scope of this paper, it
should be noted that it is possible to design the
system such that an ‘incomplete’ policy neither
suspends nor produces abnormal process or system
execution, and so it is only a desirable, not critical,
requirement that the policies are complete.
In order to ensure that the policies are complete,
the following correctness criterion must hold:
∀
e ∈
E, i ∈ I, t ∈ ℑ, ∃ (P, c) ∈ S
e
such that c ∈ C, P ∈ P,
such that
Τ
(i, t) = P and c (Z
i
(t)) = True.
In our example, an action is required to be
performed on observation of the cancellation event,
regardless of the PI state for the order. The example
policy, as presented in Table 1, is complete.
6.4 No Redundant Policy Rules
Ultimately, the main reason for the definition of
exception handling policies is to facilitate their
automatic enforcement. The ‘complexity’ of the
definition is therefore not a critical issue, provided
that the desired behaviour is achieved. However,
exception handling policies also serve as a valuable
source of ‘process knowledge’ that must be agreed
upon and ultimately maintained by domain experts.
As such, the policies should be as clear as possible.
Being explicit with all assumptions (for example,
with a ‘complete’ policy, as described above)
partially addresses this issue.
Another desirable quality for policies is that they
are not unnecessarily complex. Clearly, this issue is
subjective to some degree, and is dependent on both
the syntax and semantics of the PR condition
language (which is not the focus of this paper) and
also the underlying business scenario to be
facilitated (which can only be considered by domain
experts and process modellers). However, it is poss-
ible to make a generic observation in that policies in
which one or more PRs are completely redundant
(that is, they will never be executed, regardless of
the state of the relevant PI) should be avoided.
Redundant PRs can be safely removed without any
impact on exception handling behaviour.
Not only do redundant rules make the policy
more difficult to comprehend, but they may also
negatively affect system performance, since more
PRs than necessary must be searched through to find
the relevant action. However, this effect could be
minimised with appropriate indexing, and exception
handling behaviour should not occur frequently
anyway (by definition). In any case, as for complete-
ness, the presence of redundant PRs will generally
not cause undesirable exception handling behaviour
and so this is not a critical requirement for policies.
The set of the PIPs P is ‘valid’ in the sense that it
is constructed after analysis of the underlying
process model – that is, they are not random
combinations of nodes. However, the PRs will be
redundant if the associated data condition is a
contradiction. Detecting this issue is a relatively
easy task, by inspecting the data condition in
isolation, knowing the domain values for each of the
referenced data items. However, we wish to make a
more subtle observation.
In particular, we observe that a PR is redundant
if the combination of PIP and data condition in the
PR is invalid. Such a situation is possible because
the concepts of PIP and case data (on which data
conditions are defined) are not orthogonal. Consider
a process instance state (P, c) ∈ S
e
such that e ∈ E,
P ∈ P,
c ∈ C for which a PR is defined. Recall that
every PIP is applicable for a subset of PIGs, each of
which is associated with a set of data conditions that
are satisfied by every PI that executes the PIG.
Therefore, each PIP P ∈ P is associated with a set of
conditions C
P
⊂ C that are satisfied by every PI that
reaches P. We can encapsulate C
P
into a single
logical expression (data condition) h = c
1
∧ c
2
∧ …
∧ c
y
, ∀ c
1..y
∈ C
P
. We note if the expression h ∧ d is
a contradiction then the policy rule is redundant.
For example, the policy rule <4, Type = ‘A’,
Perform A3> is redundant, since all PIs that reach
PIP 4 must satisfy the condition Type = ‘C’.
ON CORRECTNESS CRITERIA FOR WORKFLOW
321

7 CONCLUSIONS AND FUTURE
WORK
Workflow technology is ideal for supporting
repetitive and predictable processes, but exceptions
occur often during the execution of processes in the
real world. An important class of such exceptions is
those that are expected and are asynchronous with
respect to the process in execution. The desired
reaction in response to these events will often
depend on the current state of process execution, and
we argue that the important aspects of this state for
the majority of exception handling situations are the
position of the process instance through the process
model and the values of the case data at the time at
which the exception event occurs. This reactive
behaviour is encapsulated in an exception handling
policy for each event.
In this paper, we have demonstrated that the
definition of such policies for complex processes is a
challenging exercise. In particular, it is possible to
introduce errors into the policies that may result in
undesirable execution behaviour if they were to
remain undetected. It is therefore essential to verify
policies prior to deployment, and this issue has not
yet been addressed in the literature.
We have argued that regardless of the express-
iveness or ‘syntactic sugar’ of the language used to
define the policies, or the modelled application
domain, a set of generic requirements must be
satisfied. The presentation of correctness criteria for
exception handling policies is a major contribution
of this paper. We envisage that these properties will
form the foundation for a complete verification sol-
ution for policies, to be utilised before the policies
are semantically validated by the domain experts.
In our future work, we will develop a
methodology for the automated verification of
exception handling policies based on the proposed
correctness criteria. We will also relax the restriction
that state is described only through position and case
data and consider other types of workflow control
data in policy definition and subsequent verification.
Finally, we will consider the development of a
software tool to assist with the specification and
verification of policies.
REFERENCES
van der Aalst, W.M.P., van Dongen, B.F., Herbst, J.,
Maruster, L., Schimm, G. and Weijters, A.J.M.M.
2003, ‘Workflow mining: A survey of issues and
approaches’, Data and Knowledge Engineering, vol.
47, no. 2, pp. 237-267.
Adams, M., ter Hofstede, A. H. M., Edmond, D. and van
der Aalst, W.M.P. 2005, ‘Facilitating Flexibility and
Dynamic Exception Handling in Workflows through
Worklets’, in Proc. 17th Conference on Advanced
Information Systems Engineering (CAiSE05) Forum,
June 2005, Porto, Portugal.
Bae, J., Bae, H., Kang, S.-H. Kim, Y. 2004, ‘Automatic
Control of Workflow Processes Using ECA Rules’,
IEEE Transactions on Knowledge and Data
Engineering, vol. 16, no. 8.
Carter, B. M. and Orlowska, M. E. 2007, ‘On the
Definition of Exception Handling Policies for
Asynchronous Events in Workflow Processes’, IRMA
International Conference, Vancouver, British
Columbia, Canada.
Casati, F. 1999, ‘A discussion on approaches to handling
exceptions in workflows’, SIGGROUP Bull., vol. 20,
no. 3, pp. 3-4.
Casati, F., Ceri, S., Paraboschi, S., and Pozzi, G. 1999,
‘Specification and implementation of exceptions in
workflow management systems’, ACM Transactions
on Database Systems (TODS) 24, pp. 405–451.
Casati, F., Pozzi, G. 1999, ‘Modeling Exception Behaviors
in Commercial Workflow Management Systems’, in
Proc. 4th International Conference on Cooperative
Information Systems, Edinburgh, Scotland.
Kappel, G., Rausch-Schott, S., and Retschitzegger, W.
1997, ‘Coordination in Workflow Management
Systems - A Rule-Based Approach’, Coordination
Technology for Collaborative Applications -
Organizations, Processes, and Agents, LNCS, vol.
1364. Springer-Verlag, London, pp. 99-120.
Luo, Z., Sheth, A., Kochut, K., and Miller, J. 2000,
‘Exception handling in workflow systems’, Applied
Intelligence, vol. 13, no. 2, pp. 125-147.
Mourão, H., Antunes, P. 2004, ‘Exception Handling
Through a Workflow’, in Proc. 12
th
International
Conference on Cooperative Information Systems
(CoopIS’04), pp. 37-54.
Müller, R., Greiner, U., & Rahm, E. 2004, ‘AgentWork: A
Workflow-System Supporting Rule-Based Workflow
Adaptation’, Data and Knowledge Engineering, vol.
51, no. 2.
Sadiq, S. and Orlowska, M.E. 2000a, ‘On Capturing
Exceptions in Workflow Process Models’, in Proc. 4th
International Conference on Business Information
Systems, Poznan, Poland.
Sadiq, S., Orlowska, M., Sadiq, W., and Foulger, C. 2004,
‘Data Flow and Validation in Workflow Modeling’, in
Proc. Fifteenth Australasian Database Conference,
Dunedin, New Zealand.
Sadiq, W. and Orlowska, M.E. (2000b) Analyzing Process
Models using Graph Reduction Techniques.
Information Systems, vol. 25, no. 2, pp. 117-134.
Elsevier Science.
Widom, J. and Ceri, S. 1996, Active Database Systems,
Morgan Kaufmann Publishers.
Workflow Management Coalition. 1998, The Workflow
Reference Model, Document Number TC00-1003,
Issue 1.1, 19-Jan-95.
ICEIS 2007 - International Conference on Enterprise Information Systems
322
