
SMARTCAM FOR REAL-TIME STEREO VISION
Address-event Based Embedded System
Stephan Schraml, Peter Schön and Nenad Milosevic
Austrian Research Centers GmbH, Donau-City-Strasse 1, 1220 Wien, Austria
Keywords: Stereo vision, real-time vision.
Abstract: We present a novel real-time stereo smart camera for sparse disparity (depth) map estimation of moving
objects at up to 200 frames/sec. It is based on a 128x128 pixel asynchronous optical transient sensor, using
address-event representation (AER) protocol. An address-event based algorithm for stereo depth calculation
including calibration, correspondence and reconstruction processing steps is also presented. Due to the on-
chip data pre-processing the algorithm can be implemented on a single low-power digital signal processor.
1 INTRODUCTION
Generally speaking, smart cameras are not general-
purpose devices since they are specially designed for
dedicated applications. The underlying idea of any
smart camera system is the specific visual
information processing for given application, the
goal of which is usually not to provide images of
better quality but to understand and describe what is
happening in the images for the purpose of better
decision-making or as a early-processing step for
further back-end processing.
In difference to standard CMOS or CCD imagers
a smart camera outputs either the features extracted
from the captured images or a high-level description
of the scene, which is fed into an automated control
system for decision making. On the other side, the
aspect of availability of 3D scene information
greatly simplifies or is even crucial for many real-
world image processing applications.
Smart camera systems are usually subject to
many constraints on the design, implementation and
production of the device which encapsulates it, such
as low power, limited resources, real-time
processing and low cost. For such solutions one has
to find a reasonable compromise between algorithm
complexity and fair approximation which obeys the
general assumptions imposed by the selected
application. To circumvent these constraints we
follow a new paradigm in image processing which
make use of vision sensors with focal-plane pre-
processing.
In this paper, we present a compact stereo smart
camera for sparse depth (disparity) map estimation
of moving objects, which uses an optical transient
sensor (Lichtsteiner, 2006) as front-end element.
This sensor contains an array of autonomous, self-
signaling pixels which asynchronously respond to
the temporal changes (transients) of local brightness,
and use sparse output representation of image
information with minimum amount of redundancy
while preserving precise timing information. The
transient sensor seems to be a reasonable choice for
applications which mainly consist of highly
correlated time-variant scenes coupled with large
static background regions.
Due to on-chip pre-processing of visual
information, coupled with sparse image coding
allow us the implementation of (as a general rule)
computationally very intensive stereo depth
calculation on a single low-power DSP.
This article is organized as follows: Section 2
give a short overview on optical transient sensor and
address-event representation (AER) protocol.
Section 3 presents the hardware architecture of our
embedded system. The implemented stereo
algorithm and experimental results in realistic
environment are described and shown in Section 4.
Finally, Section 5 provides summary, future
directions and concludes the paper.
466
Schraml S., Schön P. and Milosevic N. (2007).
SMARTCAM FOR REAL-TIME STEREO VISION - Address-event Based Embedded System.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 466-471
Copyright
c
SciTePress

2 TRANSIENT IMAGER AND
ADDRESS-EVENT
REPRESENTATION
The optical transient sensor (Kramer, 2002)
(Lichtsteiner, 2004) is a compact continuous-time
photoreceptor, whose individual pixels adapt to
background illuminance and react to local temporal
illuminance changes. Idealized function of each
pixel is to compute the rectified derivative of log
intensity I
I
dtdI
I
dt
d /
log =
(1)
The primary goal of logarithmic
phototransduction is to compute a “self-normalized”
temporal derivative (i.e. contrast transient) which is
invariant to absolute illumination. The individual
pixels are also polarity-sensitive, i.e. they respond to
positive (ON) and negative (OFF) transients at
separate channels.
The optical transient imager uses Address-Event
Representation (AER) output format. This
communication protocol is an asynchronous digital
multiplexing protocol, previously proposed by
(Mahowald, 1992) and (Sivilotti, 1991) in order to
model the transmission of neural information in
biological systems. Its underlying idea is that the
channel bandwidth should be devoted to the
transmission of significant signal, i.e. the AER
protocol is event-driven since only active pixels
transmit their output over the shared bus and the bus
stay unused if no changes are detected by the sensor.
Several AER designs have been proposed in the
literature (Mahowald, 1992)(Mortara, 1998), and the
one we used in this paper was developed by
(Boahen, 2000). Also, the AER has been already
proposed for stereo correspondence calculation of
one-dimensional pictures (Häflinger, 2002).
In our case, each time the derivative exceed a
given threshold a communication packet (digital
pulse) called address-event (AE), is generated and
multiplexed onto an arbitrated common binary data
bus. The information is encoded in address-event
itself, i.e. its address contains the time of origin
(time-stamp) t
ev
, the corresponding array-location of
sending pixel Xt
ev and Ytev, and the sign of the
contrast transient ω
t
ev
(ON-positive or OFF-
negative).
The signal coming from transient imager can
therefore be modelled as a time-series of single
address-events, called AE-stream:
∑
=
ev
t
ev
tAEt
stream
AE )()(
(2)
As the complete temporal information is encoded in
time-of-origin t
ev
, the signal envelope is not
significant for further signal processing, and the
individual address-event can therefore be modelled
as:
ev
t
y,y
δ
ev
t
x,x
)δ
ev
tδ(t
ev
t
ω)
ev
AE(t −=
(3)
with ω
t
ev
= +1 for positive and ω
t
ev
= -1 for negative
contrast transients.
Since static scenes produce no signal output, in
the frame-representation of sensors field-of-view
moving objects are represented as a set of coherent
edges, as showed in Figure 4. In order to visualize
the AE data, events have been accumulated for a 20
millisecond interval and restored like a video frame.
The different grey levels in Figure 4 are proportional
to pixel activity per unit time.
Compared with conventional frame-based digital
stereo processing, the computation of address-events
is obviously much more efficient and requires less
memory and computational power for applications
where no dense disparity information of moving
objects is needed. Moreover it has been proven
analytically (Mahowald, 1992), that used with a
system that has a sparse activation profile (as
transient imager in our case) the address-event
communication framework is able to preserve timing
information orders of magnitude better than
sequential scan.
3 EMBEDDED SYSTEM
IMPLEMENTATION
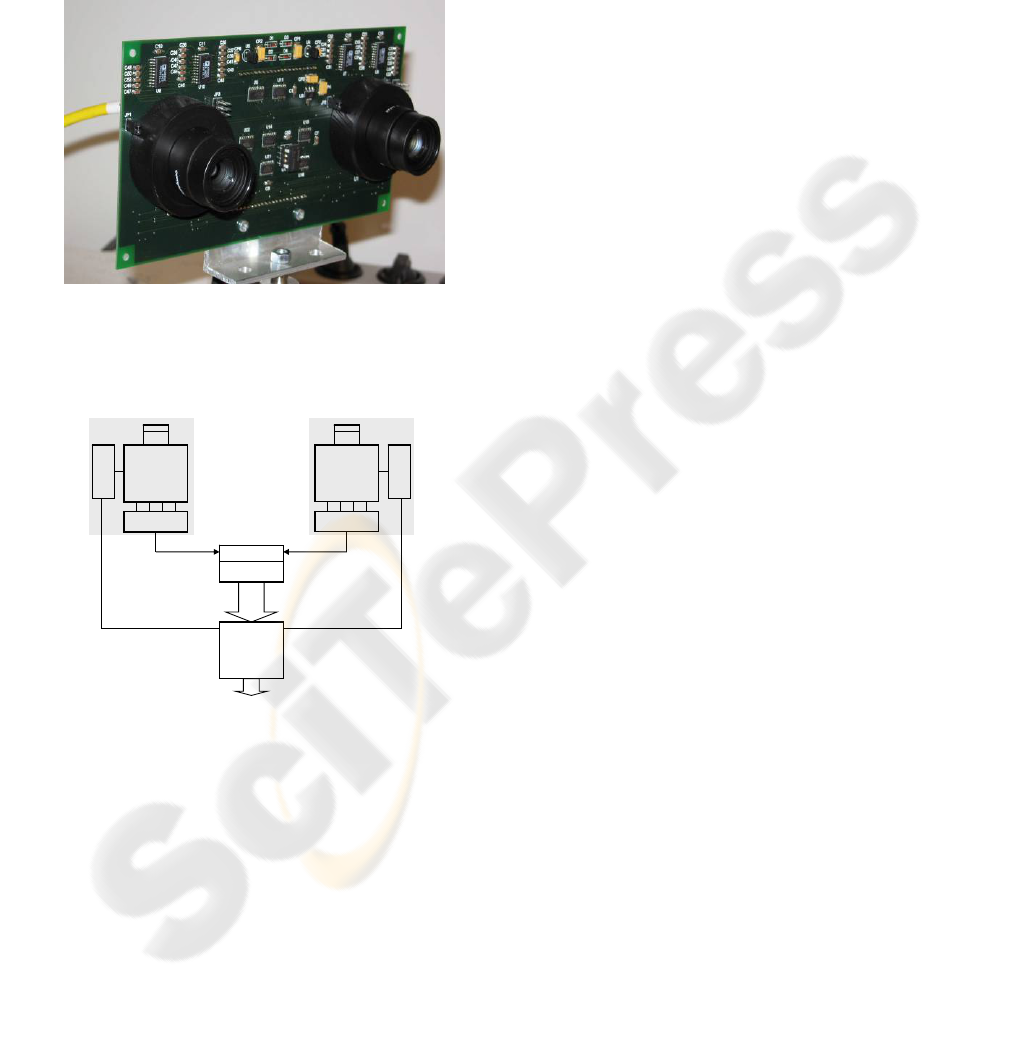
The hardware architecture of our embedded system
(shown in Figure 1) consists essentially of following
function groups: two optical transient sensors as
sensing element, a buffer unit consisting of
multiplexer and First-In First-Out (FIFO) memory,
and a digital signal processor (DSP) as processing
unit.
The transient imager we used here (Lichtsteiner,
2006) has been developed in our group in co-
operation with Institute of Neuroinformatics at ETH
Zurich, and represents an improved version of
imager developed earlier by (Kramer, 2002). It
consists of an array of 128x128 pixels, built in a
standard 0,35µm CMOS-technology. Each sensor
pixel performs at the same time photosensing, signal
pre-processing as described in Section 2, and
analog-to-digital conversion for interfacing.
The pixel address-event data are read-out
through non-greedy Boahen-type arbiter (Boahen,
2000). Our transient imager features wide dynamic
SMARTCAM FOR REAL-TIME STEREO VISION - Address-event Based Embedded System
467
range of 120dB of illumination and represents a
high-speed real-time device, since the only delay
that has to be taken into account is that for
arbitration, in order of few hundred nanoseconds
(equals to effective framerate > 1000fps). The
operating parameters of the imager are tuned by on-
board digital-to-analog converters controlled by
DSP.
The signal flow and a block diagram of our
system are plotted in Figure 2: the address-events
generated in the transient sensors arrive first at the
multiplexer unit which performs Round Robin
scheduling. Subsequently they are forwarded to the
DSP over a FIFO buffer memory. Every AE
received by DSP is labelled by attaching the
processor clock ticks with 1ms or less precision as a
time stamp. These AE-data are used as input stream
for subsequent processing, as described in next
section.
All three steps of stereo processing algorithm
including rectification, matching and disparity
calculation is implemented on Blackfin BF537 DSP
from Analog Devices® at 600MHz, with 32MB
SDRAM and 4MB flash, on-chip memory.
Our embedded system supports on-board
Ethernet function and dissipates in total roughly 5W
of electrical power. Obviously it is capable to be
used as a compact remote stand-alone application,
since it is suitable for self-sufficient battery or solar
energy supply and output data can be distributed to
any host computer or other IP-client for further high-
level image processing tasks.
4 REAL-TIME DEPTH
ESTIMATION
Our implemented algorithm for real-time depth
estimation consists of three major processing steps,
which are common for the most computational
stereo problems: (i) camera calibration and
rectification, (ii) stereo correspondence calculation
and (iii) reconstruction. In the following subsection
we give a brief description for each processing step.
4.1 The Implemented Algorithm
In order to achieve a quantitatively accurate measure
of depth, first step that has to be performed is the
camera calibration and stereo-rectification of AE-
data. The computation of internal camera parameters
(including focal length, principal point, skew
coefficient and radial lens distortion), external
parameter (rotation matrix and translation vector)
and epipolar line alignment was performed using the
Camera Calibration Toolbox
®
(Bouguet, 2005) that
employs a nonlinear gradient descent technique.
Due to AER characteristics described in
section 2, the camera calibration and rectification of
incoming address-events can be done in
computationally very efficient manner: based on
calibration results a warp-matrix is generated, and
the array-addresses Xt
ev and Ytev of each AE are
corrected instantaneously (on-the-fly) in order to
eliminate lens distortion and to have epipolar lines
that are aligned with horizontal axis.
In the next step, we performed stereo
correspondence calculation using standardised area-
based algorithm, modified/readapted in order to take
advantage of AE-based processing. The matching
algorithm is applied successively to pixel event
activity accumulated in a time-slot of duration DT.
Thereby is the event activity of array pixels stored in
form of a sorted dynamic list, where the event rate is
now encoded in the magnitude of AE
act
:
F I F O
D S P
128x128
transient
imager
128x128
transient
imager
Asynchronous
bus arbiter
Asynchronous
bus arbiter
DACs
DACs
left camera right camera
14bit AEs 14bit AEs
15bit
AEs
MUX
Figure 1: The breadboard of real-time Smart Eye(s)
embedded stereo system.
Figure 2: Hardware architecture and signal flow.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
468
,...,,;,;
)(
210
1
==
∫
+
k)dt
ev
AE(ty)x(kDT
act
AE
DTk
kDT
(4)
The time-slot duration DT (which determines the
temporal resolution of our system) is variable
parameter and can be chosen regarding to the
characteristic time-scale of the scene and settings of
temporal imager bias-values. The typical value of
DT achievable on our system lies between 5ms and
50ms, which is equivalent to the effective frame rate
of 200 fps – 20 fps if compared to the conventional
frame-based stereo systems
Starting from one active pixel in the left
image the algorithm search for the best candidate in
the right image by evaluating the similarity metric
within the disparity interval between d
min
and d
max
.
This process is then iterated for the successive AEs
lying along the scan line. Our algorithm works by
using fixed sized rectangular window
(2B+1)·(2B+1) placed around the active pixel of
interest.
We employed and tested several types of
similarity metrics like Normalized Cross-
Correlation, Sum of squared differences and Census-
Transform (Zabih, 1994), but the best overall
performance was achieved using Normalized Sum of
Absolute Differences (NSAD). The quantity of the
match for a given disparity d was therefore
evaluated according to NSAD-score:
∑∑
+
−=
+
−=
++
+−
=
B
Bx
B
By
R
act
L
act
R
act
L
act
ydxAEyxAE
ydxAEyxAE
dNSAD
),(),(
),(),(
)(
(5)
Finally, the correspondence is computed
using the Winner-Take-All principle, by finding the
minimum NSAD value for each matched active
pixel pair that lie on the same scan line. For the sake
of improving match reliability we additionally
perform bidirectional consistency check (Di Stefano,
2004) where the roles of two images are reversed,
and only those matches that turn out to be coherent
after matching left-to-right and right-to-left are
considered.
At the end, the conclusive processing step
performs reconstruction: due to the epipolar
constraint the distance Z of the scene point from the
camera can be calculated by simple triangulation Z
= bf / d, where b is the stereoscopic baseline, f is the
focal length of the camera lenses and d is the
estimated disparity. The distance between the
cameras b is 130mm, and standard camera lenses
with focal lengths from 4mm to 8mm have been
used.
4.2 Experimental Results
As described in previous section the first processing
step is the calibration of two transient imagers and
rectification of incoming address-events. Our
measurements have shown that the influence of the
radial lens distortion for shorter focal lengths is quite
dominant and can not be neglected.
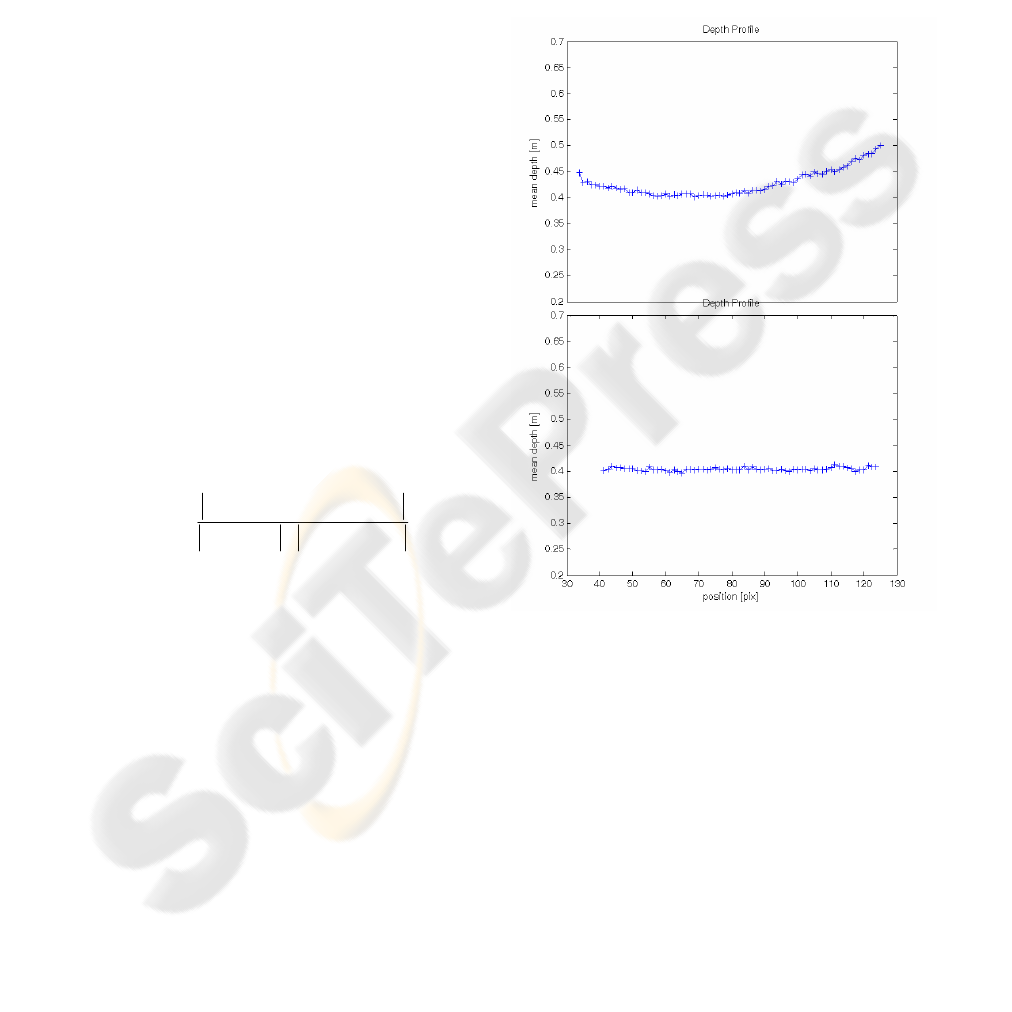
Figure 3: Mean depth of moving target (referred to the left
sensor) plotted against horizontal position between 40 and
128 pixel. Each position is defined by a dedicated time
slot, as the target swing at equidistance to the sensor with
constant velocity.
The experimental result in figure 3 shows the
significance of radial lens distortion correction in
case of 4mm lens. The figure 3 presents the
comparison of the mean depth values of a moving
target, as calculated by our stereo algorithm, without
(upper figure) and with radial correction (lower
figure). As a target we have used a thin pendulum
swinging parallel to our system at distance of 40cm.
Without lens correction mean depth shows a
declination to higher values the farther the object is
located from the optical centre (at about 64 pixel).
SMARTCAM FOR REAL-TIME STEREO VISION - Address-event Based Embedded System
469
By applying lens correction mean depth becomes as
expected a straight line.
In order to evaluate the efficiency and
accuracy of our stereo system under realistic
circumstances, we employed our system in indoor
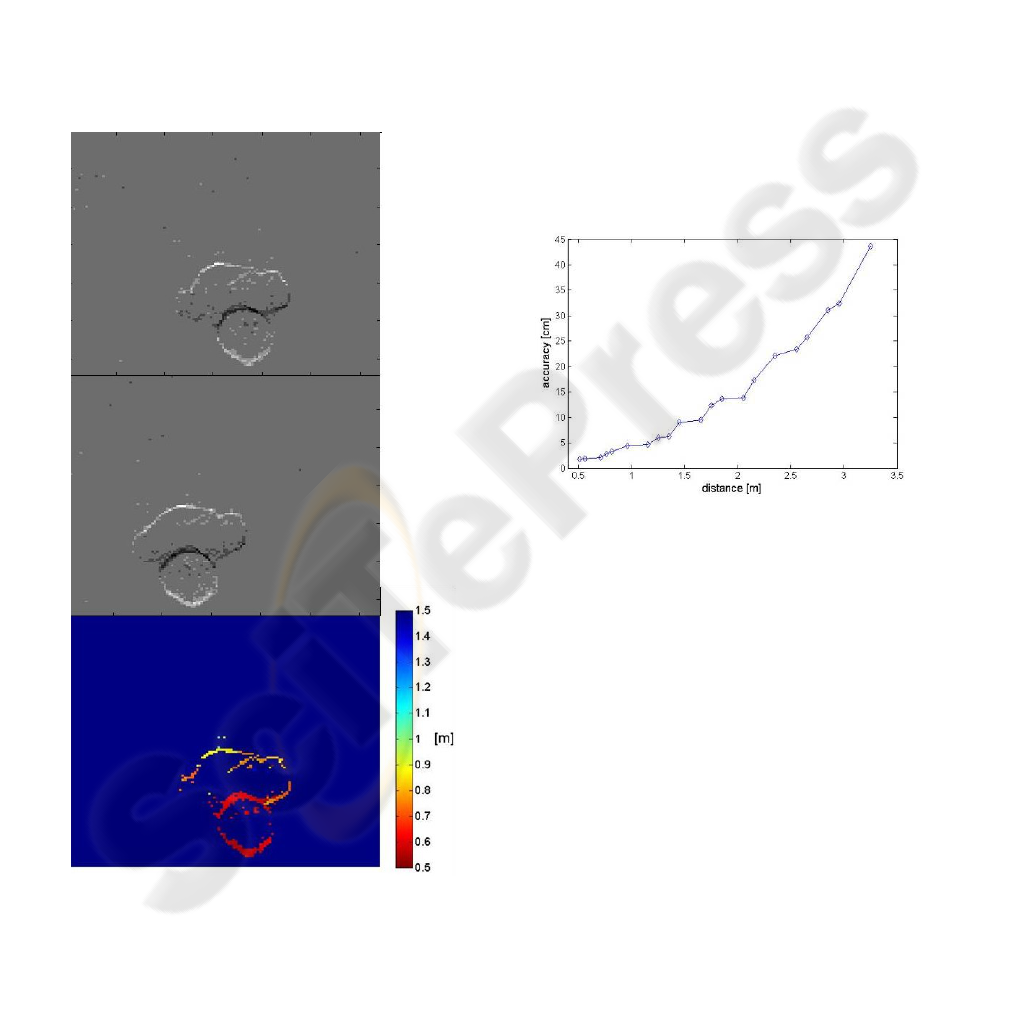
environment. The result of a typical surveillance
scene is shown in figure 4: upper and middle figures
show the event activity profiles of the left and right
transient imager respectively, and in the lower figure
the corresponding sparse depth map, refered to the
left imager, is plotted. The different grey levels
encode the event activity and the depth values (given
in m) are color-encoded. Darkest red, in depth map,
indicates object closest to camera, and darkest blue
object farthest from camera.
Figure 4: Sparse depth profile of a real surveillance scene
(a person moving under the camera mounted on a ceiling)
generated from corresponding address-event stereo pair
images.
Since we are using real images and because
of the characteristic data representation used by
transient imager it is very difficult to generate a
ground truth data for the purpose of testing our
matching algorithm. In our case we evaluate the
performance of matching algorithm manually. On
average, between 70% and 80% of AEs were
matched, and the other events were discarded due to
false matching or bidirectional consistency check.
The quantization error of each processing
step was not analysed, but instead we have estimated
the overall average error of the final depth
measurement result. The real world disparity was
evaluated by a series of measurement of a rotating
disc. Taking equidistant samples we made a data set
of which we could estimate the ground truth
disparity reasonably accurate and measure the mean
root square error (RMSE) of calculated depth values.
Figure 5 gives an idea of the overall accuracy of the
depth estimation.
Figure 5: Measured accuracy (RMSE) of our stereo
Smartcam using 8mm lenses.
5 CONCLUSIONS AND FUTURE
WORK
This paper shows the feasibility of implementing an
AE-based stereo algorithm for sparse depth map
calculation on a single DSP. The proposed algorithm
processes AE-data generated by transient imager and
take advantage of its focal pre-processing and
efficient asynchronous address-event
communication framework.
The complete system is implemented in form of
small size, low power and cheap embedded system.
Finally, experimental evaluation of our sensor show
that is capable to give real-time depth information of
moving objects with reasonable accuracy under
realistic conditions.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
470

Since our stereo smart camera is a stand-alone,
self-contained device that integrates image sensing,
stereo depth calculation and communications in one
single box, it seems to be suitable for a number of
special types of application like:
Mashine vision in industrial inspection (e.g.
3D-position control; shape, orientation and
volume measurement; detection and fast
sorting of arbitrary objects on a transportation
units)
Surveillance domain (detecting and counting
persons passing through monitored area like
doors, portals or terminals; reliable intruders
detection due to possibility (Lichtsteiner,
2006) of operating the sensor in night or near-
IR range)
ACKNOWLEDGEMENTS
We would like to thank Bernard Kohn und Daniel
Bauer for support in hardware implementation. This
work is part of VSOC-Project which is funded by
“Nationalstiftung für Forschung, Technologie und
Entwicklung”.
REFERENCES
Boahen, K., 2000. Point-to-Point Connectivity between
neuromorphic chips using address events. In IEEE
Trans. on Circuits and Systems II, 47 (5), 416-433.
Bouguet, J. Y., 2005. Matlab camera calibration Toolbox,
http://www.vision.caltech.edu/bouguetj/calib_doc.
Di Stefano, L., Marchionni, M., Mattoccia, S., 2004. A
fast area-based stereo matching algorithm. In Image
and Vision Computing, 22, 983-1005.
Häfliger, Ph., Bergh., F., 2002. An integrated circuit
computing shift in stereo pictures using time domain
spike signals. In Conference paper NORCHIP 2002,
Københaven.
Kramer, J., 2002. An integrated optical transient sensor. In
IEEE Transactions on Circuits and Systems II,
49(9), 612-628.
Lichtsteiner, P., Posch, C. and Delbruck, T., 2006. A
128×128 120dB 30mW Asynchronous Vision Sensor
that Responds to Relative Intensity Change. In
International Solid State Circuits Conference, San
Francisco, pp. 25-27 .
Lichtsteiner, P., Kramer, J., Delbruck, T., 2004. Improved
ON/OFF temporally differentiating address-event
imager. In 11th IEEE International Conference on
Electronics, Circuits and Systems, Tel Aviv, Israel.
Moore, R., Lopes, J., 1999. Paper templates. In
TEMPLATE’06, 1st International Conference on
Template Production. INSTICC Press.
Mahowald, M., 1992. VLSI analogs of neuronal visual
processing: a synthesis of form and function, Ph.D.
dissertation, California Institute of Technology.
Mortara, A., 1998. A pulsed communication /
computation framework for analog VLSI perceptive
systems. In Neuromorphic Systems Engineering, T.
S. Lande, Ed. Norwell, MA: Kluwer Academic,
pp. 217-228.
Sivilotti, M., 1991. Wiring considerations in analog VLSI
systems, with application to field-programmable
networks”, Ph.D. dissertation, California Institute of
Technology.
Zabih, R., Woodfill, J., 1994. Non-parametric Local
Transforms for Computing Visual Correspondence. In
Proceedings of 3rd European Conf. on Computer
Vision, pp. 150-158.
SMARTCAM FOR REAL-TIME STEREO VISION - Address-event Based Embedded System
471
