
ROBUST ADAPTIVE WAVELET NEURAL NETWORK TO
CONTROL A CLASS OF NONLINEAR SYSTEMS
A. Hussain, N. Essounbouli, A. Hamzaoui
CReSTIC, IUT de Troyes,9 rue de Québec, Troyes, France
J. Zaytoon
CReSTIC, Uiversité de Reims Champagne-Ardenne, Reims, France
Keywords: Adaptive control, adaptive wavelet neural network systems, adaptive identification, nonlinear systems,
sliding mode control.
Abstract: This paper deals with the synthesis of a Wavelet Neural Network adaptive controller for a class of second
order systems. Due to its fast convergence, the wavelet neural network is used to approximate the unknown
system dynamics. The proposed approximator will be on-line adjusted according to the adaptation laws
deduced from the stability analysis. To ensure the robustness of the closed loop system, a modified sliding
mode control signal is used. In this work, variable sliding surface is considered to reduce the starting energy
without deteriorating the tracking performances. Furthermore, the knowledge of the upper bounds of both
the external disturbances and the approximation errors is not needed. The global stability of the closed loop
system is guaranteed in the sense of Lyapunov. Finally, a simulation example is presented to illustrate the
efficiency of the developed approach.
1 INTRODUCTION
In last decade, active research has been carried out
in neural network control (
Omidvar, 97) (Noriega, 98)
(
Lin, 98). The characteristics of fault tolerance,
parallelism and learning suggest that they may be
good candidates for implementing real-time adaptive
control for nonlinear dynamical systems. It has been
proven that an artificial neural network can
approximate a wide range of nonlinear functions to
any desired degree of accuracy under certain
conditions (
Omidvar, 97). It is generally understood
that the selection of the neural network training
algorithm plays an important role for most neural
network applications. In the conventional gradient-
descent-type weight adaptation, the sensitivity of the
controlled system is required in the online training
process (
Lin, 98). However, it is difficult to acquire
sensitivity information for unknown or highly
nonlinear dynamics. Moreover, the local minimum
of the performance index remains variable (
Omidvar,
97). In practical control applications, it is desirable
to have a systematic method for ensuring the
stability, robustness, and performance properties of
the overall system. Recently, several neural network
control approaches have been proposed based on
Lyapunov stability theory (
Fabri, 96) (Farrell, 98)
(Seshagiri, 00). One main advantage of these control
schemes is that the adaptive laws were derived based
on the Lyapunov synthesis method and therefore, the
stability of the control system is guaranteed.
However, some constraint conditions should be
assumed in the control process, e.g., the
approximation error, optimal parameter vectors, or
higher order terms in a Taylor series expansion of
the nonlinear control law are bounded. Also, the
prior knowledge of the controlled system may be
required, e.g., the external disturbance is bounded or
all states of the controlled system are measurable.
These requirements are not easy to satisfy in
practical control applications. Recently, Wavelet
Neural Networks (WNN) have became a very active
subject in many scientific and engineering research
areas (Zhang, 95) (Kostka, 00) (Lin, 03) (Ho, 05).
The WNN have been proposed as a universal tool
for functional approximation, which combine the
capability of artificial neural networks in learning
60
Hussain A., Essounbouli N., Hamzaoui A. and Zaytoon J. (2007).
ROBUST ADAPTIVE WAVELET NEURAL NETWORK TO CONTROL A CLASS OF NONLINEAR SYSTEMS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 60-67
DOI: 10.5220/0001640400600067
Copyright
c
SciTePress

and the capability of wavelet decomposition. The
WNN allows resolving the conventional problem of
poor convergence or even divergence encountered in
other kinds of neural networks. It can also increase
convergence speed (Delyon, 95) (Hsu, 06).
Sliding mode control is unique in its ability to
achieve accurate, robust, decoupled tracking for a
class of nonlinear time-varying systems in the
presence of disturbances and parameter variations
(Utkin, 77) (Salamci, 01). The tracking of the
desired trajectory is achieved through two phases: an
approach phase, where the system is controlled to
attain a predefined sliding surface, and a sliding
phase along the sliding surface. However, in order to
deal with the presence of modelling imprecision and
disturbances, the control law has to be discontinuous
across the sliding surface. Since the implementation
of the associated control switching is necessarily
imperfect, this leads to chattering which involves
high control activity and may excite high-frequency
dynamics and can, therefore, damage the plant
(Slotine, 91). To resolve this problem, many
solutions have been proposed in the literature
(Slotine, 91)- (Lin, 02) (Berstecher, 01) (Hwang, 01)
(Lin, 95) (Wai, 04). In (Slotine, 91), a boundary-
layer in the neighbouring of the sliding surface has
been defined to obtain a continuous behaviour of the
control signal across this surface. Based on the same
idea, a fuzzy system has been used to define this
boundary layer and to exploit the human knowledge
(Lin, 02). To remove the discontinuity in the control
signal, some approaches combining sliding mode
control and classical controller using a fuzzy
supervisor can be cited (Berstecher, 01) (Hwang, 01)
(Lin, 95). These methods resolve the problem related
to the chattering phenomenon. However, to design
the switching signal assuring the approaching phase,
the upper bounds of both the external disturbances
and the structural uncertainties must be well known.
To overcome these problems, the authors of
(Hamzaoui, 04) (Wai, 04) have proposed an
approximation of the switching signal by an adaptive
fuzzy system to eliminate the chattering
phenomenon without requiring any particular
knowledge about the upper bounds of both
approximation errors and external disturbances.
Nevertheless, the global stability of the closed loop
system in these approaches is guaranteed only for a
good approximation level or for a particular choice
of the initial values of the adjustable parameters.
This paper proposes a wavelet Neural Network
Adaptive Control (WNNAC) for a class of second-
order nonlinear, uncertain and perturbed systems;
this controller combines the advantages of WNN
identification and the robustness of sliding mode
control. The control law is composed of two parts.
The first one represents the WNN identifier that
perform the online system dynamic function
estimation. This identifier is adjusted according
some adaptations laws deduced from the stability
analysis. The second part of the control law
represents the robust term which ensure the
robustness of the closed loop system in the sense of
sliding mode technique. This term is synthesised
such that knowing of the upper bounds of the
external disturbances is not required. Furthermore,
the proposed control law uses a variable sliding
surface to reduce the starting energy obtained by a
classical sliding surface. The stability of the closed
loop system is stated using the Lyapunov theory. To
illustrate the efficiency of the proposed approach, a
numerical simulation example is considered.
The paper is organised as follows: Section 2
illustrates the description of WNN networks. Section
3 is dedicated to the formulation and the
investigation of the control problem. In section 4, we
present the synthesis of the proposed controller
whose design procedure is explained in section 5. To
show the efficiency of the proposed approach, a
simulation example is presented in section 6.
2 DESCRIPTION OF WAVELET
NEURAL NETWORKS (WNNS)
Wavelet neural networks are special case of feed-
forward neural networks. The main difference
between the artificial neural networks (ANN) and
WNN is that, in ANN the nonlinearities are
approximated by superposition of sigmoid functions.
However, in WNN, nonlinearities are approximated
by superposition of wavelet functions (Oussar, 98).
Similar to ANN, WNN are also shown to have
universal approximation property (Yoo, 05)
(Sureshbabu, 99).
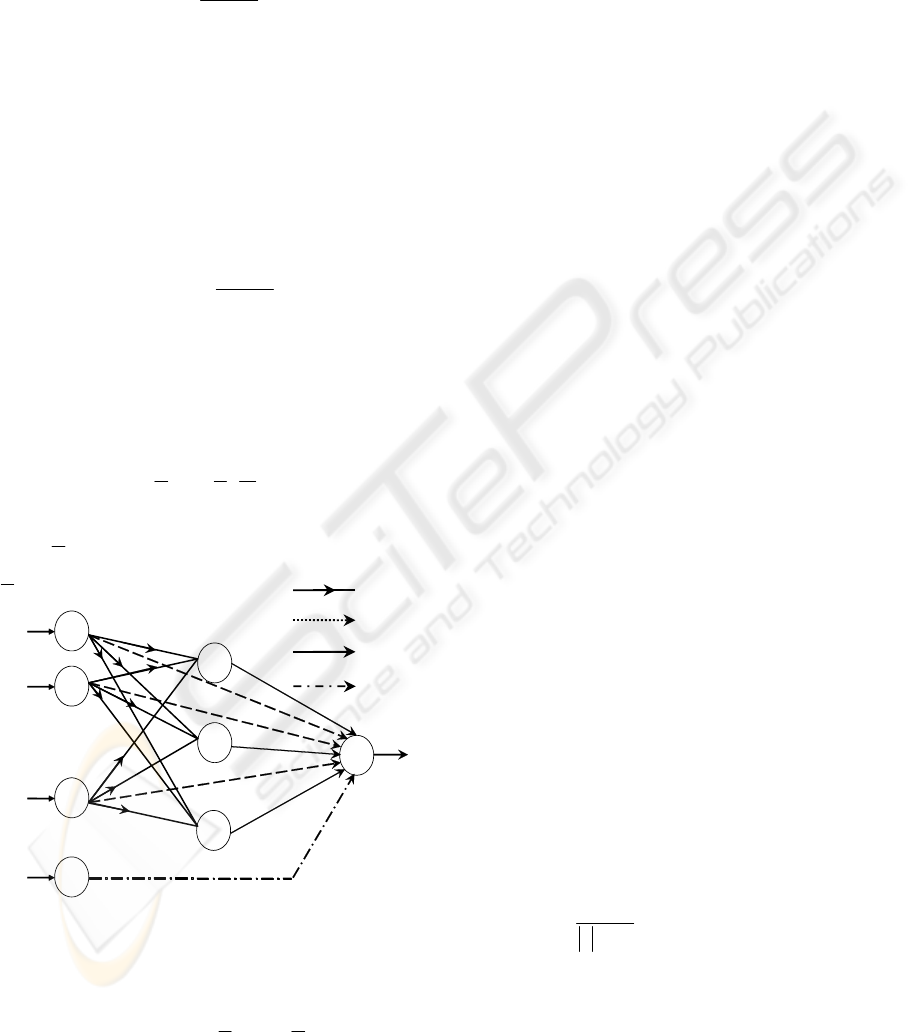
Similar to the ANN, the WNN consists of an
input layer, a hidden layer, and an output layer. The
WNN model structure shown in Figure 1 consists of
'n' input neurons
12
(,,,)
n
x
xx… in the input layer,
equal to the number of input variables. The input
neurons are connected to the next layer of neurons,
called the hidden layer neurons which make use of
wavelets as transformation functions. These neurons
are termed as "wavelons". In this work, the Mexican
hat (1) is used as a 'mother' wavelet
ψ
.
22
( ) (1 ) exp( 0.5 )
x
xx
ψ
=− × −
(1)
ROBUST ADAPTIVE WAVELET NEURAL NETWORK TO CONTROL A CLASS OF NONLINEAR SYSTEMS
61
Several daughters of wavelets
j
ψ
can be constructed
by translating and dilating the mother wavelet
ψ
according to (2).
()
j
j
j
j
t
z
d
σ
ψψ
⎛⎞
−
=
⎜⎟
⎜⎟
⎝⎠
(2)
where
1
n
j
ij i
i
vx
σ
=
=
∑
,
ij
v
is input scaling vector
while
j
t
, and
j
d
represent the translation and
dilation factors of the wavelet.
For i and j represent the indices of input, hidden, and
output layers respectively, the output from the
hidden wavelon,
j
H
is given by (3).
1
()
n
j
j
j
j
i
t
Hx
d
σ
ψ
=
⎛⎞
−
=
⎜⎟
⎜⎟
⎝⎠
∑
(3)
This output is connected directly to the output layer
neurons. The output layer usually consists of a linear
output neuron. Mathematically, the final production
obtained from figure 1 can be represented by (4).
TT
output
YCAXB=Ψ+ +
(4)
with
[]
1
T
T
J
Cc c= ,
[
]
1
J
H
HΨ= and
[]
1
T
n
A
aa=
Figure 1: The structure of the used WNN.
The approximator in figure 1 includes three
independent adaptable parts; constant, linear and
non-linear given by
B ,
A
and C respectively.
Thus, the approximator (4) is able to estimate
efficiently all possible systems static or dynamics by
managing learning rate of each part.
3 PROBLEM STATEMENT
Consider the following 2
nd
order system:
(,) (,)yfyygyyud
=
++
(5)
where
f
and
g
are two unknown continuous
functions.
u and y designate the input and output
of the system respectively while
d is an external
disturbance assumed to be unknown but bounded.
The input-output system (5) includes a large class of
non-linear second-order systems likes Duffing
oscillator and mass-spring-damper system
(Bartoloni, 97) (Roup, 01) (Chang, 05).
In this work, we assume that the function
(, )
g
yy
can be written as a sum of a known nominal
term and an uncertain as follows
0
(,) (,) (,)
g
g
yy g yy yy
δ
=
+
In this case, equation (5) can be rewritten as:
0
(,) (,)
d
yfyygyyu
δ
=
++
(6)
where
dg
ud
δ
δ
=
+
.
The objective of this work is to synthesize a
robust controller, based on sliding mode, able to
force the output of the system y to follow a bounded
reference trajectory
d
y under the constraint that all
involved signals are bounded.
We denote the tracking error by
d
ey y=− and the
sliding surface by:
s
ee
λ
=
+
(7)
Since using a large value of the slop
λ
gives a fast
system response. However, a too large value can
lead to overshoot and even instability. From the
other side, small value of
λ
results a slow system
response. To overcome this problem, the slope can
be adapted according to tracking error value
()et (Liu, 05). In this case, equation (7) becomes
()
s
eee
λ
=
+
(8)
where
()
k
e
e
λ
λ
λ
ε
=
+
,
k
λ
is a given positive constant
and
λ
ε
is a small positive scalar given by the
designer.
Differentially according time of equation (8) gives
() () () ()
() ()
d
st et et et
y y et et
λλ
λλ
=+ +
=−+ +
(9)
is
ij
v
is
i
a
is
j
c
is
B
Bias
X
1
X
2
X
n
ψ
j
ψ
1
ψ
2
?
y
output
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
62

Using (6), equation (9) becomes
0
() () ()
dd
s
tyfgu et et
δλ λ
=−− −+ +
(10)
0
() () ()
dd
s
tf etguyet
δλ λ
=− − + − + +
(11)
0
() ( , , ) ()
dd
s
t Fyyy gu y et
λ
=− − + +
(12)
where
(,, ) ()
dd
F
yyy f et
δλ
=+ −
.
In the next section, the problem of
(,, )
d
F
yyy
term
estimation will be treated
4 THE WNN ADAPTIVE
CONTROLLER SYNTHEISIS
It is worthy to say that if the system output and its
time derivative converge to their reference signal,
the unknown function
(,, )
d
F
yyy
goes
to
(,)
dd
F
yy
. To approximate (,, )
d
F
yyy
we can
use a WNN in the form
ˆ
(,)
TT
dd d
F
yy C AY B
ψ
=+ +
with
d
y and
d
y
as inputs (Chang, 05).
Consider the pre-assigned constraint regions of
C ,
A
and B defined respectively as:
{}
/,0
Ccc
CC MMΩ= ≤ >
{}
/,0
AAA
AA M MΩ= ≤ >
{}
/,0
BBB
BB M MΩ= ≤ >
According to the approximation theorem, there
exists a finite optimal value of
(,)
dd
F
yy
noted by:
*
***
ˆ
(, )
T
T
dd d
F
yy C AY B
ψ
=+ +
(
C
C ∈Ω ,
A
A∈Ω and
B
B
∈
Ω ) such that:
*
ˆ
(, ) (, )
Fdd dd
F
yy Fyy
δ
=−
hence, equation (12) can be rewritten as:
*
0
ˆ
() ( , )
()
dd F d
d
s
tFyy guy
et
δ
λδ
=− + − +
++
(13)
To guarantee the global stability of the closed loop
system and the convergence of the tracking error to
zero, we propose the following control law:
1
0
2
ˆ
() ( , )
dd d
s
ut g F y y y e
λ
ρ
−
⎡⎤
=− +++
⎢⎥
⎣⎦
(14)
Substituting (14) in (13) yields to:
*
2
ˆˆ
() ( , ) ( , )
dd dd d
dFd
s
tFyyFyyy
s
ey e
λλδδ
ρ
=− + −
−++++−
(15)
which can be rewritten as
2
()
TT
d
Fd
s
tC AyB
s
ψ
δδ
ρ
=
++
++−
(16)
To study the stability of the closed loop system and
to find the adaptation laws for the adjustable
parameters, we consider the following Lyapunov
function:
22
11 1 1
()
22 2 2
TT
CA B
vt s C C A A B
γγ γ
=+ +
(17)
The time derivative of
()vt is given by:
11 1
()
TT
CA B
vt ss C C A A BB
γγ γ
=+ +
(18)
Substituting (16) in (18) gives:
2
()
11 1
TT
dFd
TT
CA B
s
vt s C A y B
CC AA BB
ψδδ
ρ
γγ γ
⎛⎞
=++++−
⎜⎟
⎜⎟
⎝⎠
++
()
()
()
2
2
1
()
11
T
Fd C
C
T
Ad B
AB
s
vt s s C C s
A
Asy BBs
δ
δγψ
γ
ρ
γγ
γγ
=+−+ +
++++
(19)
Choosing the following adaptation law
C
Cs
γ
ψ
=−
(20)
Ad
A
sy
γ
=−
(21)
B
Bs
γ
=−
(22)
leads to:
2
2
()
Fd
s
vt s s
δδ
ρ
=+−
(23)
22
22
2
2
() 2
2
44
2
2
2
F
d
s
ss
vt
ss
ρδ
ρ
ρ
ρ
δ
ρ
ρ
=− + −
+−
(24)
ROBUST ADAPTIVE WAVELET NEURAL NETWORK TO CONTROL A CLASS OF NONLINEAR SYSTEMS
63
22
2
22 22
2
()
2
Fd
Fd
ss
vt
s
ρδ ρδ
ρρ
ρδ ρδ
ρ
⎛⎞⎛⎞
=− − − −
⎜⎟⎜⎟
⎝⎠⎝⎠
++−
(25)
2
222
2
()
2
Fd
s
vt
ρ
δρδ
ρ
≤− + +
(26)
Let
,0
s
s
s
μμ
⎧⎫
⎪⎪
Ω= ≤ >
⎨⎬
⎪⎪
⎩⎭
.
According to the regions
S
Ω ,
C
Ω ,
A
Ω and
B
Ω
,
there is a sufficient large constant
max
V such that
max
max , , , ( )
SC A B
sC A B
Vvt
∈Ω ∈Ω ∈Ω ∈Ω
≤
(Chang-05).
Afterward, we can define
max
2
e
e
V
e
⎧⎫
⎪⎪
Ω= ≤
⎨⎬
⎪⎪
⎩⎭
and
2
max
2
2
e
V
e
e
k
λ
λ
ε
⎧⎫
⎪⎪
Ω= ≤
⎨⎬
⎪⎪
⎩⎭
In the case where the sliding surface is outside the
region
S
Ω , for choosing
22
42
1
Fd
δ
δ
ρμ
+
>
there exists a positive constant
ζ
such that:
()
2
vt s
ζ
≤−
(27)
From the definition of the constraint region, we have
()
max
0vV≤ . From the inequality (23), we obtain
()
max
() 0vt v V≤≤ which implies that
s
s ∈Ω for all
0t ≥ and therefore
e
e ∈Ω and
e
e ∈Ω
(Chang-05).
Hence,
s
CAB
Ω×Ω ×Ω ×Ω is an invariant set, we
can conclude that all the variables are bounded.
Since the Lyapunov function is negative outside the
constraint set
s
Ω , then sliding surface is Uniformly
Ultimately Bounded (UBB) and hence the tracking
error is also UBB.
By integrating the above inequality between 0 and T,
we obtain:
2
222
2
000
() (0)
2
TTT
Fd
s
vT v dt dt dt
ρδ ρδ
ρ
−≤− + +
∫∫∫
2
222
2
000
(0) ( )
2
TTT
Fd
s
dt v v T dt dt
ρδ ρδ
ρ
≤−+ +
∫∫∫
(28)
Since
() 0vT ≥ , we have
2
222
2
000
2
TTT
Fd
s
dt dt dt
ρδ ρδ
ρ
≤+
∫∫∫
or
22 22
000
44
TTT
Fd
s
dt dt dt
ρδ ρδ
≤+
∫
∫∫
(29)
Using the Barbalat’s lemma (Wang, 94), one can see
that the sliding surface converges asymptotically to
zero despite the presence of external disturbances.
Hence, the sliding surface is attractive, i.e., if the
system attains the surface, it remains and converges
toward the origin as demonstrated in (Utkin, 99).
d
dt
d
dt
Control
action
synthesis
eq. (14)
Σ
Plant
Σ
External
disturbance
e
λ
-
+
()dt
s
Σ
y
d
y
()ut
d
dt
d
y
d
y
λ
(e)
k
λ
ε
λ
2
1
ρ
1
0
g
−
d
y
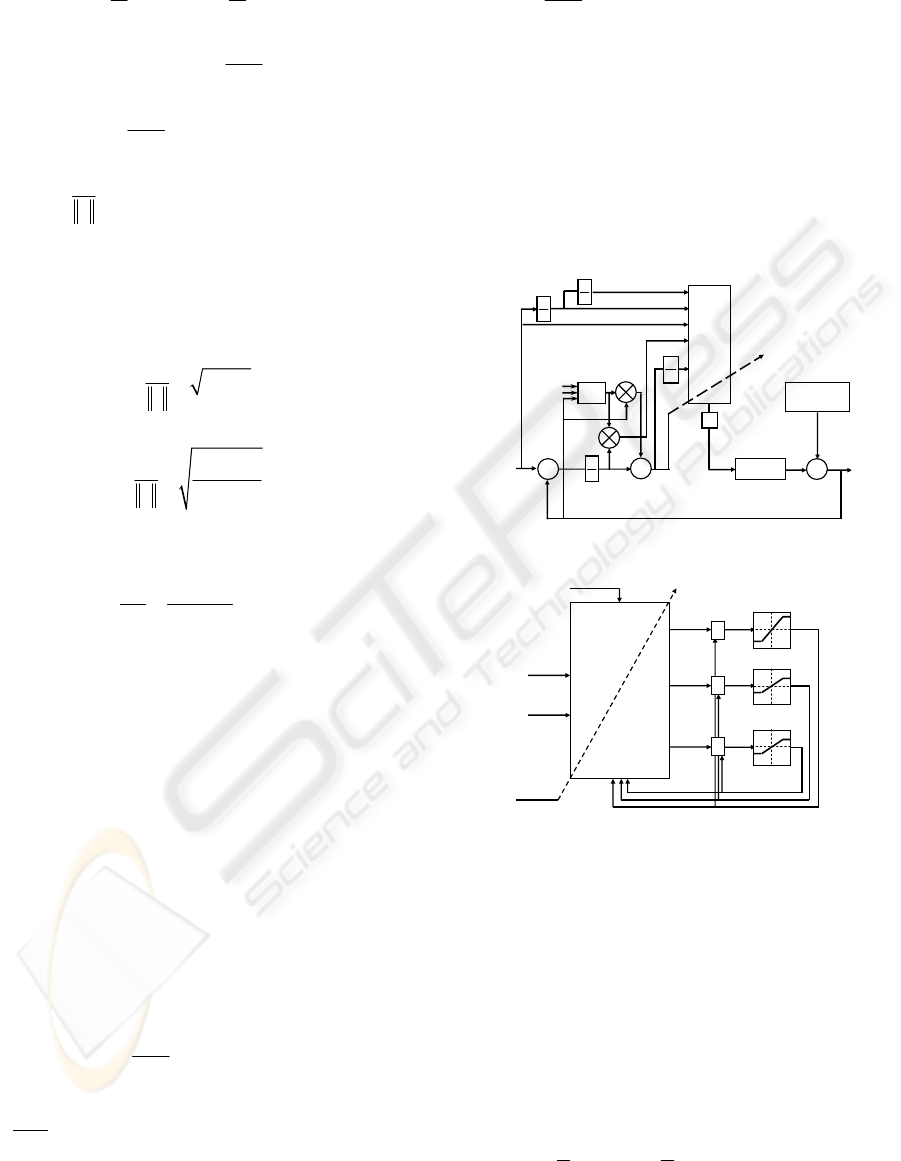
Figure 2: Control scheme of the proposed approach.
AWN
Given in Eq. (4)
Adaptation
Given in Eq.
(20)-(22)
ˆ
C
•
ˆ
A
•
ˆ
B
•
∫
∫
∫
S
ˆ
C
ˆ
A
ˆ
B
d
y
d
y
CBA
γ
γ
γ
,,
Figure 3: Adaptive Wavelet Network illustration.
5 DESIGN PROCEDURE
The control scheme of the proposed approach and
the adaptive WNN block are given respectively by
figures 2 and 3. The control law (14) can be
synthesised according to the following steps:
Step 1: define the interval range for each input
(, )
dd
yy
and the corresponding wavelet parameters
(dilation and translation) such that input range is
covered uniformly. To adapt on-line the adjustable
parameters
A
, B and C , we define the learning
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
64

rates
A
γ
,
B
γ
and
C
γ
. To increase approximator
nonlinearity, we choose
C
γ
bigger than
A
γ
and
B
γ
.
Step 2: specify the parameters k
λ
and
λ
ε
to calculate
the sliding surface given in (8). To deduce the
control law (14), we choose
ρ
. This value represents
a trade-off between the initial starting energy and the
time response in transient state.
Step 3: update the adjustable parameters of the
WNN according to equation (20), (21) and (22).
6 SIMULATION EXAMPLE
In order to validate the proposed controller, the
Wing-Rock Motion (WRM) system is considered in
simulation. Indeed, some combat aircrafts often
operate at subsonic speeds and high angles of attack.
These aircrafts may become unstable due to
oscillation, mainly a rolling motion known as WRM
(Lan, 95) (Lin, 02). the dynamics of WRM system
can be described in a state variable by:
3
01 2 3 4 5
yb bybybyybyyby
ud
=+ + + + +
++
(30)
Where
y is the roll angle, u is the control action and
d is the external disturbance. The parameters related
to
( 1,...,5)
i
bi= are the aerodynamic parameters
given by:
0
0b = ,
1
-.01859521b = ,
2
.015162375b = ,
34 5
.06245153, .00954708 and .02145291.bb b== =
According to the design procedure given in section
5, we will define at first the AWNN. Indeed if we
consider that
cos( )
d
yt= being the desired reference
trajectory, then the interval range of the desired
output (as well as the actual system output in case of
perfect tracking) will belongs always to the closed
interval [-1, 1]. For the purpose of reliability and to
give some relaxation to our controller, the interval
]5.1,5.1[− is considered as a universe of discourse
for both of input and hidden layers in the WNN
approximator. The number of wavelons (wavelet
neurons) components used in the hidden layer are
four which is enough for covering the interval [-1.5,
1.5] adequately. For a WNN approximator, the
number of waveleons components used in the hidden
layer depends on the network input’s interval and
dynamic complexity for the system to be
approximated. Translation parameters selection is
considered in a way that guarantees the uniform
covering of the [-1.5, 1.5] interval simply using
linspace Matlab
©
instruction. Dilation parameters
specify the intersection amount between wavelons
activation function (daughter function) which is
chosen to be 0.5 such that the horizontal axes
0.5y
=
contains these intersection points. The
adjustable parameters
A
, B and C are initialized to
zero such that random initialization case is avoided
since it doesn’t gives neither same initials nor same
training speed. Alternatively, these parameters might
be chosen through some trials to achieve favourable
transient control performance. For constants
A
γ
,
B
γ
and
C
γ
corresponding to the learning rates, it is
important to recognize there effects to approximate
accurately the nonlinear system and to avoid
masking nonlinear property in the structure shown in
figure 1. For this, it is better choosing
C
γ
much
bigger than
A
γ
and
B
γ
. In our example, the values
10
c
γ
=
, 0.05
B
γ
=
and 0.05
A
γ
=
have been
considered. According to the second step in the
design procedure, the variable sliding mode may be
achieved through variation in surface slope
()
λ
. For
this we choose
20k
λ
=
and 0.5
λ
ε
= .
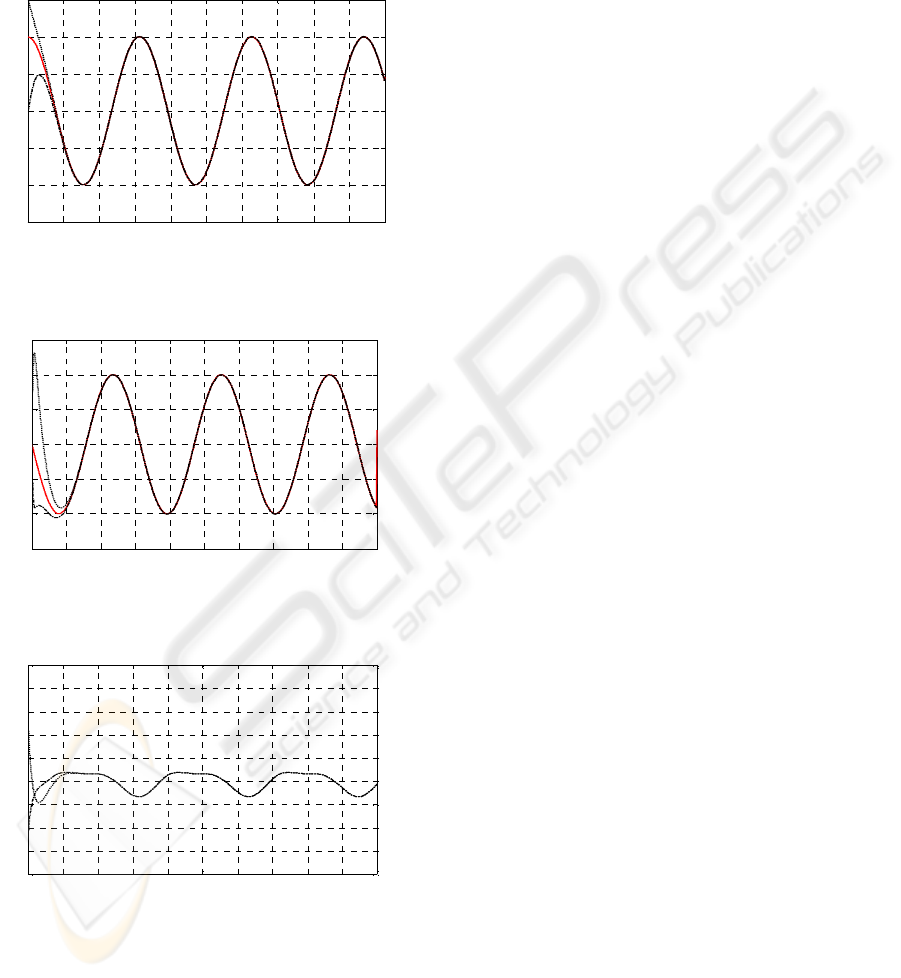
Several simulations have been done and figures 4 to
6 show the results obtained for
0.5
ρ
= where the
system is subjected to external disturbance with
0.3sin(2 )dt
=
. Figures 4 to 6 give the simulation
results for two different initial positions. We remark
that the system attains the reference trajectory
rapidly despite that the initial condition is so far
from the reference one. Short response time reflects
the good convergence of WNN. Furthermore, figure
6 shows the elimination of the chattering
phenomenon and the absence of the abrupt
variations appearing in classical sliding mode
control. Comparing the obtained results with those
in the case of linear sliding surface (
λ
constant), the
proposed approach guarantees the same tracking
performances with 40% initial control action
reduction.
7 CONCLUSION
In this paper a robust adaptive wavelet neural
network to control a class of nonlinear systems was
presented. The combination of WNN and sliding
mode control allows to develop a robust controller to
guarantee the good tracking performances and the
closed loop system stability. Considering a variable
sliding surface reduces the starting energy without
deteriorating the tracking performances.
ROBUST ADAPTIVE WAVELET NEURAL NETWORK TO CONTROL A CLASS OF NONLINEAR SYSTEMS
65
Furthermore, no knowledge about of the upper
bounds of both the external disturbances and the
approximation errors is required to synthesis the
control law. Simulation results have been presented
to show the efficiency of the proposed approach.
Current work is dedicated to the generalisation of
this method to n
th
multi-input multi-output systems.
0 2 4 6 8 10 12 14 16 18 2
0
-1.5
-1
-0.5
0
0.5
1
1.5
Time (S)
Figure 4: Evolution of the system output and its reference
signal (-:y
d
, ..: y(t) with y(0)=1.5; -.-: y(t) with y(0)=0).
0 2 4 6 8 10 12 14 16 18 20
-1.5
-1
-0.5
0
0.5
1
1.5
Time (S
)
Figure 5: Evolution of the state
y
and its reference signal
(-:
d
y
, ..:
y
with y(0)=1.5; -.-:
y
with y(0)=0).
0 2 4 6 8 10 12 14 16 18 20
-8
-6
-4
-2
0
2
4
6
8
10
Time (S)
Figure 6: The control signal applied to the system (...: u(t)
with y(0)=1.5; -.-: u(t) with y(0)=0).
REFERENCES
Antsaklis, P. J., Jun. 1995. vol. 15, Issue 3, pp. 5 - 7. In
Intelligent Learning Control IEEE Control Syst. Mag.
IEEE Press.
Astrom, K. J., Wittenmark, B., 1995. In Adaptive Control.
Addison-Wesley, 2
nd
edition.
Bartoloni, G., Ferrara, A., Usai, E., 1997. vol. 33 pp.
2203-2212. In Automatica, Output tracking control of
uncertain nonlinear second-order systems. Elsevier.
Berstecher, R.G, Palm, R., Unbehauen, H.D., 2001. vol.
48, pp. 18-31. In An Adaptive Fuzzy Sliding Mode
Controller, IEEE Trans. on Indus. Electr., IEEE press.
Broderick, R. L., 2005. vol. 1, pp. 6.C.2-01-10. In daptive
verification for an on-line learning neural-based flight
control system, the 24th Digital Avionics Systems
Conference, IEEE Press.
Chang, Y. C., Yen, H. M., 2005. vol. 35, pp. 1311-1316.
In Adaptive output Feedback control for a class of
uncertain nonlinear systems using neural networks,
IEEE Trans. Systems, Man, & Cybernetic. IEEE Press.
Chang, Y.-C., 2005. part B: cybernetics
vol. 35, no. 6
pp.1108- 1119. In Intelligent Robust Control for
Uncertain Nonlinear Time-Varying Systems and Its
Application to Robotic Systems, IEEE Trans. on syst.
Man & Cyber., IEEE Press.
Delyon, B., Juditsky, A., Benveniste, A., 1995. vol. 6, no.
2, pp.332–348. In Accuracy analysis for wavelet
approximations, IEEE Trans. Neural Networks. IEEE
Press.
Fabri, S., Kadirkamanathan, V., Sept. 1996. vol. 7, pp.
1151–1167, Dynamic structure neural networks for
stable adaptive control of nonlinear systems, IEEE
Trans. Neural Networks IEEE press.
Farrell, J., Baker, W., 1993. pp. 237-262. In Learning
control systems, In Passino, K. M., Antsaklis, P. J.
(Eds.), An Introduction to Intelligent and Autonomous
Control. Kluwer Academic Publishers.
Farrell, J. A., Sept. 1998. vol. 9, pp.1008–1020 Stability
and approximator convergence in nonparametric
nonlinear adaptive control,” IEEE Trans. Neural
Networks. IEEE press.
Grman, J., Ravas, R., Syrová, L., 2001. vol. 1, no. 1, pp.
25–28. In Application of Neural Networks in
Multifrequency Eddy-Current Testing, Measurement
Science Review. Slovak Academy of Sciences.
Hamzaoui, A., Essounbouli, N., Zaytoon, J., 2004. vol.
218 (4), pp. 287-298. In Fuzzy sliding mode control
with fuzzy switching function for nonlinear uncertain
MIMO Systems, Journal of Systems and Control
Engineering.
Ho, D. W. C., Li, J., Niu, Y., 2005. vol. 16, no. 3, pp. 625-
635. Adaptive Neural Control for a Class of
Nonlinearly Parametric Time-Delay Systems, IEEE
Trans. on Neural Networks, IEEE Press.
Hsu, C.F., Lin, C.M., Lee, T.T., 2006. vol. 17, no. 5, pp.
1175-1183. In Wavelet Adaptive Backstepping Control
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
66

for a Class of Nonlinear Systems, IEEE Trans. On
Neural Networks, IEEE Press.
Huang, S. N., Tan, K. K,. Lee, T. H., 2002. vol. 38, no. 2,
pp. 227–233. In Automatica, Adaptive motion control
using neural network approximations, Elsevier.
Hwang, C.-L., Kuo, C.-Y., 2001. vol. 9 (2), pp. 238-252.
In A stable adaptive fuzzy sliding-mode control for
affine nonlinear systems with application to four-bar
linkage systems, IEEE Trans. On Fuzzy Syst. IEEE
press.
Kostka, P., Tkacz, E. J., Nawrat, Z., Malota, Z., 2000. pp.
2463-2465. In An application of wavelet neural
networks for heart valve prostheses characteristic,
Proceedings of the 22nd Annual EMBS International
Conference, IEEE Press.
Lan, C. E., Chen, Y., Lin, K. J., 1995. vol. 32, pp. 905–
910. In Experimental and analytical investigations of
transonic limit-cycle oscillations of a flaperon,
Journal Aircraft, American Institute of Aeronautics
and Astronautics.
Lin, C. M., Hsu, C. F., 2002. vol. 25, pp. 1163–1165,2002.
In Recurrent neural network adaptive control of wing
rock motion, Journal of guidance, control, and
dynamics. American Institute of Aeronautics and
Astronautics.
Lin, S.C., Chen, Y.Y., Mar. 1995. vol. 3, pp. 1103-1110.
In A GA-based fuzzy controller with sliding mode,
Proc. IEEE Int.Conf. on Fuzzy Systems. IEEE Press.
Lin, F. J., Hwang, W. J., Wai, R. J., 1998. vol. 145, no. 2,
pp. 105–110, Ultrasonic motor servo drive with on-
line trained neural network model-following
controller, Proc.IEE—Elect. Power Applicat. . IEEE
press.
Lin, W.-S., Chen, C.-S., 2002. vol. 149, pp. 193-202. In
Robust adaptive sliding mode control using fuzzy
modelling for a class of uncertain MIMO nonlinear
systems, IEE Proceedings: Control Theory and
Applications, IEEE Press.
Lin, F.J., Wai, R. J., Chen, M. P., 2003. vol. 20, no. 6, pp.
686-698. In Wavelet Neural Network Control for
Linear Ultrasonic Motor Drive via Adaptive Sliding-
Mode Technique, IEEE Trans. On Ultrasonics,
Ferroelectrics & Frequency Control, IEEE Press.
Liu, Z. L., Nov. 2005. vol. 152, no. 6, pp. 615- 620
Reinforcement adaptive fuzzy control of wing rock
phenomena, IEE proc. Control theory appl. IEE press.
Narendra, K. S., Parthasarathy, K., Mar. 1990. vol. 1, no.
1, pp. 4–27, 1990. In Identification and control of
dynamic systems using neural networks, IEEE Trans.
Neural Net. IEEE press.
Noriega, J. R., Wang, H, Jan. 1998. vol. 9, pp. 27–34.
A
direct adaptive neural-network control for unknown
nonlinear systems and its application, IEEE Trans.
Neural Network, IEEE Press.Omidvar, O., Elliott, D.
L., 1997. Neural Systems for Control. New York:
Academic.
Omidvar, O., Elliott, D. L., 1997. Neural Systems for
Control. New York: Academic.
Oussar, Y., Rivals, I., Personnaz, L., Dreyfus, G., 1998.
vol. 20, pp. 173-188, 1998. In Training wavelet
networks for nonlinear dynamic input-output
modeling, Neurocomputing, Elsevier
Psillakis, H. E., Alexandridis, A. T., Mar. 2006. vol. 153,
No. 2. In Adaptive neural motion control of n-link
robot manipulators subject to unknown disturbances
and stochastic perturbations. IEE Proc. Control
Theory Appl. IEE press.
Roup, A. V., Bernstein, D. S., 2001. vol. 46, pp. 1821-
1825. In Adaptive stabilization of a class of non-linear
systems with parametric uncertainties, IEEE Trans.
Automatic Control, IEEE Press.
Salamci, M. U., Ozgoren, M. K., 2001. vol. 23, no. 4, pp.
719-727. Sliding mode control with optimal sliding
surfaces for missile autopilot design, Journal of
Guidance, Control and Dynamics, , 2001.
Sastry, S., Bodson, M., 1989. In Adaptive Control:
Stability, Convergence, and Robustness. Prentice-Hall.
Seshagiri, S., Khalil, H. K., Jan. 2000. vol. 11, pp. 69–79,
Output feedback control of nonlinear systems using
RBF neural network,” IEEE Trans. Neural Networks
IEEE press.
Slotine, J.-J. E., Li, W., 1991. In Applied Nonlinear
Control. Prentice-Hall.
Sureshbabu, N., Farrell, J. A., Feb. 1999. vol. 44, no. 2,
pp.412-417. In Wavelet-Based System Identification
for Nonlinear Control, IEEE Transactions on
automatic control,IEEE Press.
Utkin, V.I., 1977. vol. 22, pp. 212-222.Variable structure
systems with sliding modes,” IEEE Trans. Automatic
Control, IEEE Press.
Utkin, V. I., 1999. vol. 22, pp. 212-222. In Variable
structure systems with sliding modes, IEEE Trans.
Automatic Control, IEEE Press.
Wai, R.J., Lin, C. M., Hsu, C.F., 2004. vol. 143, pp. 295-
310. In Adaptive fuzzy sliding mode control for
electrical servo drive, Fuzzy Sets & Systems, Elsevier.
Wang, L.-X., 1994. In Adaptive fuzzy systems and control,
Prentice-Hall.
Wong, L.K., Leung, F.H.F., Tam, P.K.S., 1998. vol. 1, pp.
296-301. In Combination of sliding mode controller
and PI controller Using fuzzy logic controller,
IEEE
Int. Conf. on Fuzzy Systems. IEEE Press.
Yoo, S. J., Park, J. B., Choi, Y. H. Mar. 2005. vol. 3, no.
1, pp. 43–55. In Stable Predictive Control of Chaotic
Systems Using Self-Recurrent Wavelet Neural
Network, International Journal of Control,
Automation, and Systems, IEEE Press.
Zhang, Q., Walter, G. G., Miao, Y., Lee, W. N. W., Jun.
1995. vol. 43, pp. 1485-1496. In Wavelet neural
networks for function learning, IEEE Trans. Signal
Proc., IEEE Press.
ROBUST ADAPTIVE WAVELET NEURAL NETWORK TO CONTROL A CLASS OF NONLINEAR SYSTEMS
67
