
PRELIMINARY TESTS OF THE REMS GT-SENSOR
Eduardo Sebastián and Javier Gomez-Elvira
Lab. de Robótica y Exploración Planetaria, Centro de Astrobiología, Ctra. Ajalvir Km.4, Torrejón de Ardoz, Spain
Keywords: Environmental monitoring, infrared temperature detector, system identification and sensor calibration.
Abstract: This paper describes and tests a mathematical model of the REMS GT-sensor (Ground Temperature), which
will be part of the payload of the NASA MSL mission to Mars. A short review of the instrument most
critical aspects like the in-flight calibration system and the small size, are presented. It is proposed a
mathematical model of the GT-sensor based on an energy balance theory, which considers the internal
construction of the thermopile, and allows the designer to model independently the change in any of its
parameters. The instrument includes an in-flight calibration system which accounts for dust build up on the
thermopile window during operations. Pre-calibration tests of the system are presented, demonstrating the
good performance of the proposed model, as well as some required improvements.
1 INTRODUCTION
This paper describes a set of preliminary tests to
validate a mathematical model of the REMS (Rover
Environmental Mars Station) GT-sensor (Ground
Temperature). The REMS is a meteorological station
designed at the Centro de Astrobiología, which is
part of the payload of the MSL (Mars Science
Laboratory) NASA mission to Mars. This mission is
expected to be launched in the final months of 2009.
The detection of Mars surface temperature is
essential to develop meteorological models of Mars
atmospheric behavior
(Richardson et al., 2004).
Mars suffers very extreme ground temperature
gradients, from -135ºC to 40ºC between winter and
summer. Also, differences of ±40ºC between the
ground and the atmosphere at 1.5m over the surface
are expected (Smith et al., 2004).
The GT-sensor, as its name indicates, is
dedicated to measure the brightness temperature of
the Mars surface, using an infrared detector that
measures the emitted thermal radiation. The detector
focuses a large surface area, which is far enough
from the rover as to minimize its influence,
measuring the average temperature and avoiding
local effects. The main GT-sensor requirement is to
achieve an accuracy of 5K, in which the errors
created by rover influence, ground emissivity
uncertainty and sensor noise must be included.
The selected infrared detector is a thermopile.
These sensors have the advantage that they can work
at almost any operational temperature, are small and
lightweight and comparative cheap, as well as they
are sensible to all the infrared spectra. Taking into
account the restricted resources available for the
REMS, there is hardly any alternative to
thermopiles. Contrary, thermopiles are not standard
parts for space or military applications. Therefore, at
present no formally space qualified thermopile
sensors exist. It should be noted here, that the IRTM
experiment on the VIKING mission and the MUPUS
experiment of the ROSETA mission have proven the
suitability of this kind of detector to measure low
object temperatures under space conditions.
The paper is organized as follows; section 2
introduces a brief description the REMS GT-sensor.
In section 3 the mathematical model of the sensor is
presented. Section 4 shows preliminary real tests
results, using the proposed model. Finally, section 5
summarizes the results.
2 THE REMS GT-SENSOR
The GT-sensor measures the emitted radiation of the
Mars surface in two infrared wavelength channels,
by using two detectors, looking directly to ground
without any optical system. The selected
measurement channels of the thermopiles are the 8-
14μm and 16-20μm (Vázquez et al., 2005)
. These
channels avoid the abortion band of the CO
2
centred
in 15μm (Martin, 1986), and minimize the influence
103
Sebastián E. and Gomez-Elvira J. (2007).
PRELIMINARY TESTS OF THE REMS GT-SENSOR.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 103-107
DOI: 10.5220/0001638801030107
Copyright
c
SciTePress
of sun radiation. The thermopiles are of the model
TS-100 (IPHT, 2007), previously used for the
ROSETA mission, which include a RTD sensor and
a filter build to the specification and pre-bonded
onto them as the thermopile window.
The use of two measurement channels is justified
in two ways. First, each channel is specialised in the
measure of a temperature range, based on the Planck
law and higher S/N ratio. And second, the output
signal of the two channels can be combined in order
to apply colour pyrometry techniques. This can help
to estimate the emissivity of the Mars ground,
despite both channels appears to have nearly unit
emissivity (Vázquez et al., 2005).
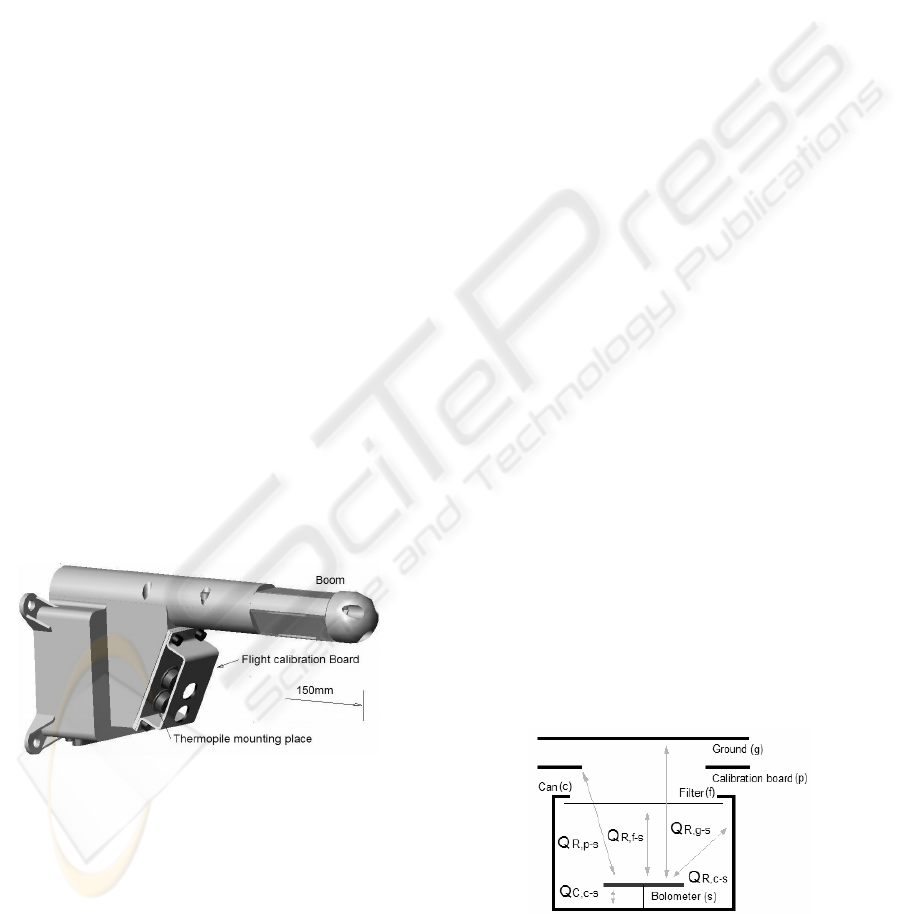
The thermopiles are mounted inside a boom,
figure 1, which is placed in the rover mast at 1.5m
height. The boom has the form of a small arm of
150mm long, and it also hosts the electronics
dedicated to amplify thermopiles signal. The boom
is made of aluminium and is used as a thermal mass
to ensure and acceptably low drift in thermopiles
temperature. The boom’s form permits to avoid the
existence of lateral lobules in the thermopile FOV
(field of view), minimizing the rover direct vision.
The GT-sensor includes an in-flight calibration
system whose main goal is to compensate the
detector degradation due to the deposition of dust
over its window (Richardson et al., 2004). The
system is implemented, without moving parts, by a
high emissivity, low mass calibration plate at a
temperature of our choosing. It is placed in front of
each detector, so that each detector looks at the
ground through a hole in the plate. In this way the
part of the FOV obstructed by the calibration system
is an annulus, limiting the measurement solid angle.
Figure 1: REMS boom and thermopile sensors.
3 MATHEMATICAL MODEL
Usually, the mathematical equation to model a
thermopile considers it as a black box with an input,
the incident energy, and an output, the output
voltage. Therefore, a thermopile is characterised
using a gain with units [V/W], which depends on
thermopile temperature. This equation behaves
properly for high target temperatures, and when no
thermopile worsening is expected during operation.
Essentially, if there is degradation, a parameterized
model is required in order to compensate it.
Contrary, the proposed model is based on an
energy balance theory (Richardson et al., 2004)
,
which considers the internal thermopile structure
and operation. It behaves better for low target
temperatures, and for a wide range of thermopile
temperatures. It also permits to establish adaptation
algorithms for the change in model parameters.
3.1 Thermopile Model Equations
The proposed model uses two equations. The first
one shows the response of the thermocouples, which
form the thermopile. The thermopile is integrated by
100 thermocouples connected in series and
embedded between the can and the bolometer
(IPHT, 2007). The equation (1) determines the
relation between the thermopile output voltage and
the temperature difference between the hot
(bolometer, T
s
) and the cold junction (can, T
c
).
Therefore, from the measurement of (T
c
) and the
output voltage (V
out
), the value of T
s
can be obtained.
))((
cscout
TTTfV −
=
, (1)
The function
)(
c
Tf
can be approximated by a
polynomial expression provided by the thermopile
manufacturer, which depends on thermopile or can
temperature (T
c
).
The second one is the energy balance equation,
and it accounts for the heat fluxes into the
thermopile bolometer from all the bodies around it.
As the bolometer is designed to be well insulated
from the can and to have low thermal mass, the
equilibrium condition of the equation, is reached
after a setting time of a few milliseconds. The
equation considers a simplified model of energy
exchange by thermal radiation (Q
R
) and conduction
(Q
C
), see figure 2.
Figure 2: GT-Sensor energy terms.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
104
From the analysis of the energy terms, and after
the thermal equilibrium is reached, the equation (2)
represents the thermal circuit
0
,,,,,
=
++++
−−−−− scCscRsfRspRsgR
QQQQQ
(2)
Based on simplified heat flux models, the
equation (2) can be expressed in the following way,
()
()()
()()
()
sc
T
s
T
c
O
s
O
f
I
s
I
p
I
s
I
g
TTKEEKEEK
EEKEEK
−+−+−
+−+−−=
···
····10
324
11
αα
(3)
where
α
represents the factor of the thermopile FOV
obstructed by the flight calibration board, and K
1
,
K
2
, K
3
and K
4
are constants which modulate the
weight of the different terms. These constants
depend on physical factors of the bodies around like:
emissivity, FOV factors, viewed areas, and in the
case of K
3
on thermal conductance of the materials.
The energy terms
y
x
E
are calculated integrating the
Planck law (4) for each body temperature (T
x
).
∫
⎟
⎠
⎞
⎜
⎝
⎛
−=
2
1
52
1·2)·(
y
y
KT
hc
y
x
dehcTE
X
λλλ
λ
(4)
where the subscript x represents the body, g(ground),
p(calibration board), f(filter), c(thermopile can) and
s(bolometer). T(
λ
) is the transmittance of the filter.
And the superscript T, I or O denotes if the energy
flux is calculated in the total spectra, in band or out
of filter band respectively.
3.2 Calibration System Equations
The main origin of thermopile degradation, while
operating on Mars conditions, is dust deposition.
During landed operations dust will collect on the
thermopile’s filter. Dust, which has high emisivity,
will block light both into and out the detector, and it
will equilibrate to the same temperature as the filter
it is now in contact. It can therefore be seen as a
changing the area of the filter into something similar
to the can. In other words, if the factor β represent
the part of the FOV that has not been obstructed by
the dust, the equation (3) can be rewritten,
()
(
)
(
)
() ()
()
()
sc
T
s
T
c
T
s
T
c
O
s
O
c
I
s
I
p
I
s
I
g
TTKEEK
EEKEEK
EEKEEK
−+−
+−−+−
+−+−−=
··
·)·1(··
·····1·0
32
11
11
ββ
αβαβ
(5)
The equation (5) includes two simplifications:
The filter temperature is supposed to be equal to the
can temperature, and the factor that weights the filter
influence K
4
is equal to the ground factor (K
1
), due
to both shares the same FOV.
Therefore, it is the factor β that must be
determined during operations. This can be done by
varying the temperature of the calibration board if
the ground brightness temperature can be trust to
remain constant while the temperature changed
(Smith et al., 2004). The temperature of the
thermopile, the flight calibration board, and the
output voltage of the thermopile must be collected
before and after the temperature changed. Finally,
using the data collected and the equation (5), the
system of equations (6) can be defined,
[
]
111
···0 dcEbEa
I
p
I
g
+++=
β
(6.1)
[
]
222
···0 dcEbEa
I
p
I
g
+++=
β
(6.2)
where a, b, c and d are a set of known energy terms.
And, the system can be solved for the factor
β
,
(
)
212112
· ccEEbdd
I
p
I
p
−+−−=
β
(7)
4 TEST RESULTS
In this section, four preliminary experimental tests
dedicated to validate and show the performance of
the sensor model are presented. The tests pretend to
be a simple exercise in ambient conditions of the
experiments to calibrate the REMS GT-sensor.
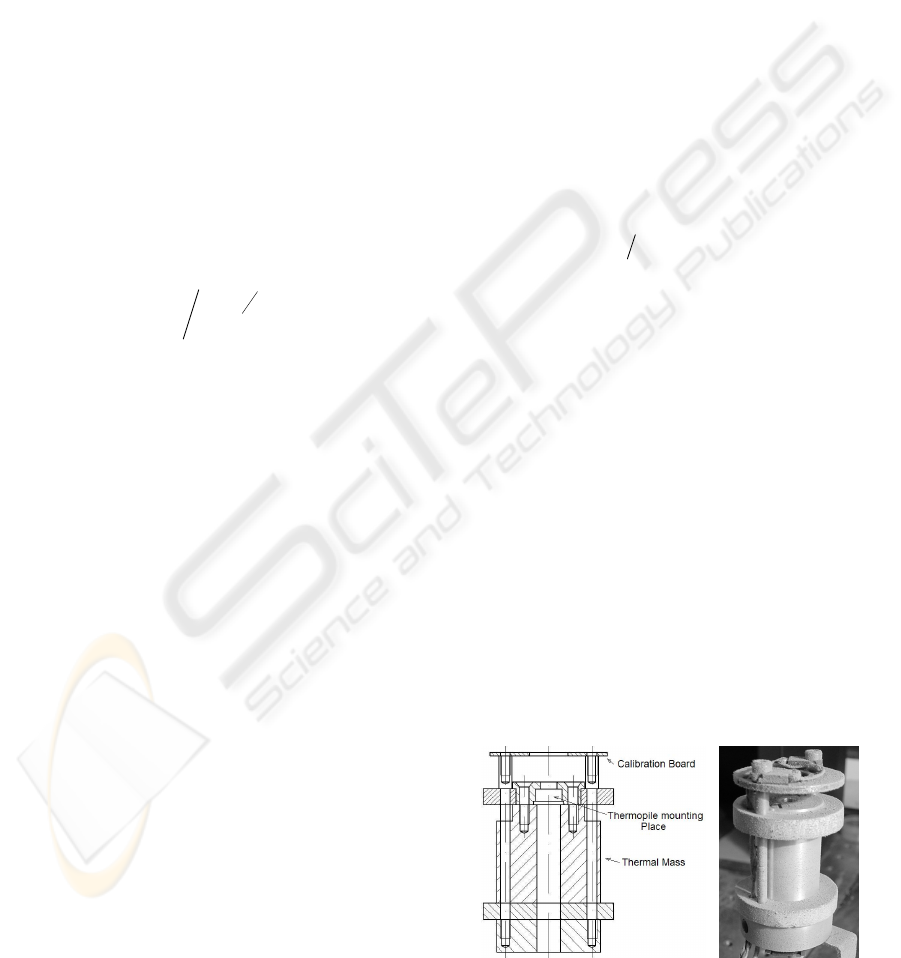
Prior to start with the description of the tests, it is
necessary to define the experiment setup, figure 3. A
thermopile with a band past filter of 8-14μm,
looking at the calibrated blackbody source
MIKRON M315 and covering its all FOV, was used.
The temperature of the flight calibration board and
the thermopile’s can have been measured using two
individual T type thermocouples, glued to these
elements. The temperatures of both elements have
been controlled using two control systems CAL3200
and the associated thermocouple.
Figure 3: Thermopile model layout and real test model
after dust deposition.
PRELIMINARY TESTS OF THE REMS GT-SENSOR
105
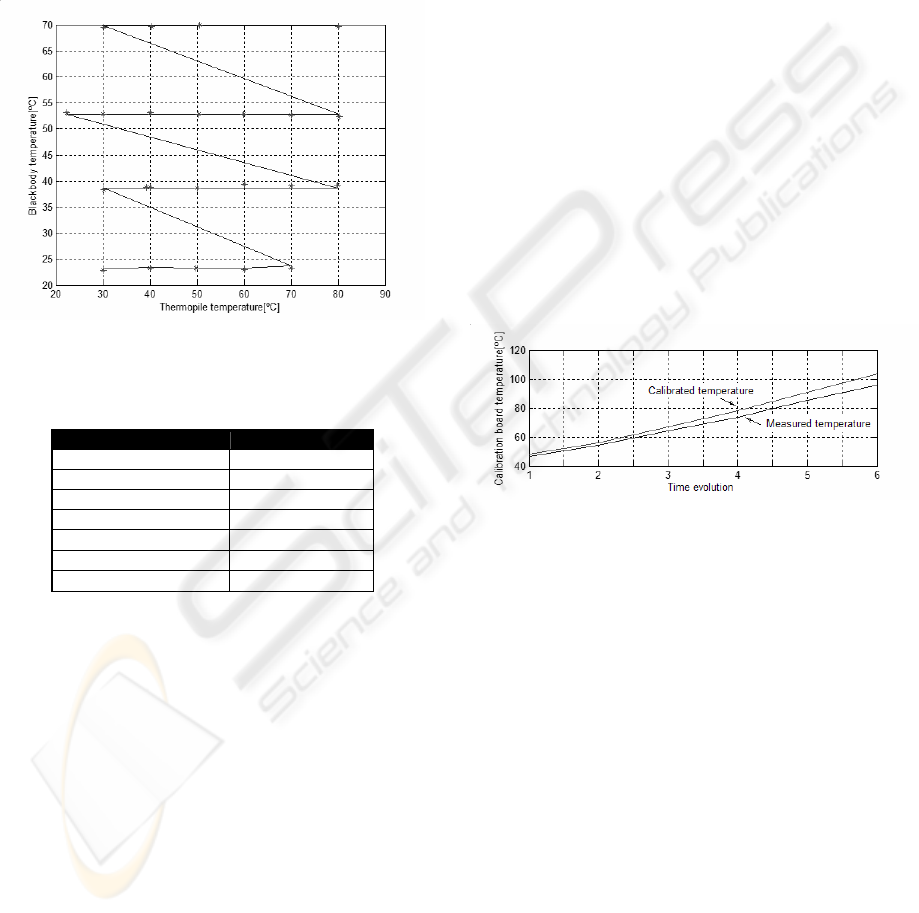
The first test tries to identify the value of those
unknown constants of the thermopile model, table 1.
In order to do it, different blackbody and thermopile
temperatures were consigned, figure 4, while the
flight calibration board was removed, which means
that
α
is equal to 0. Therefore, based on the energy
balance equation (2), where the energy terms are
known, a least-squares problem for the tested points
is established. Finally, the values of the constants,
which minimize the least-squares error, are obtained.
Figure 4: Real blackbody temperature (-) and estimated
blackbody temperature (*) after the identification process.
Table 1: Thermopile and model variables.
Variable Value
K
1
1
K
2
28.1695
K
3
128.4088W/K
Error
RMS
0.28K
α
0.34
Polynomial coefficients [1.0826 -4.0577]
β
0.415
The second test has been carried out with the
purpose of identifying the factor of the FOV
obstructed by the flight calibration board, this is α.
This value is an essential parameter, necessary for
the flight calibration process.
During the test, the thermopile and the
calibration board must be kept at ambient
temperature, to ensure that their temperatures are
homogeneous and stable. This requirement is
necessary due to the radiance of the flight calibration
has not previously calibrated, and in this way the
error introduced by this factor is avoided. The
blackbody temperature is set over the ambient
temperature. In order to avoid the thermopile
heating, due to the energy radiated by the blackbody,
an opaque surface was introduced in between. This
surface was removed during the measurement time
of bodies temperature and thermopile output. From
these data, the energy terms of equation (2) were
calculated, and we were able to solve for the values
of α, for each blackbody temperature. Finally, these
values of α were averaged in order to obtain a
unique value, table 1.
The third test pretends to know the real
temperature of the calibration board, which is
required to calculate its real radiometric emission.
The test consists of varying the flight calibration
board temperature over the temperature of the
thermopile, while the temperature of the thermopile
and the blackbody are kept constant.
In this case, for each calibration board
temperature, the blackbody and the thermopile
temperatures were collected, as well as the
thermopile’s output. Therefore, based on these data
and the energy valance equation (2), the radiometric
emissions of the flight calibration board are derived,
and from them the real temperatures, which were
compared with the measured temperatures to
determine the absolute calibration error, figure 5.
Also, a first order polynomial, interpolating this
error, has been obtained, table 1.
Figure 5: Temperature calibration error of the flight
calibration board.
The final test is dedicated to analyse the
behaviour of the in-flight calibration algorithm, after
depositing a certain among of dust over the
thermopile window, simulating Mars environment.
The test is divided in two different steps. In the
first one, the flight calibration algorithm is run for
different calibration board temperatures. The figure
6(Top) shows the obtained values of β, with and
without considering the previous calibration of the
calibration board. The data after calibration are more
stable, validating this calibration and reducing
algorithm error. As a result the average value of β is
shown, table 1.
The second step is dedicated to measure the
temperature of the blackbody from: the thermopile
output, the calibrated thermopile model, the
calculated value of the factor β due to dust
deposition. During the test, the temperature of the
blackbody was almost constant, while the
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
106
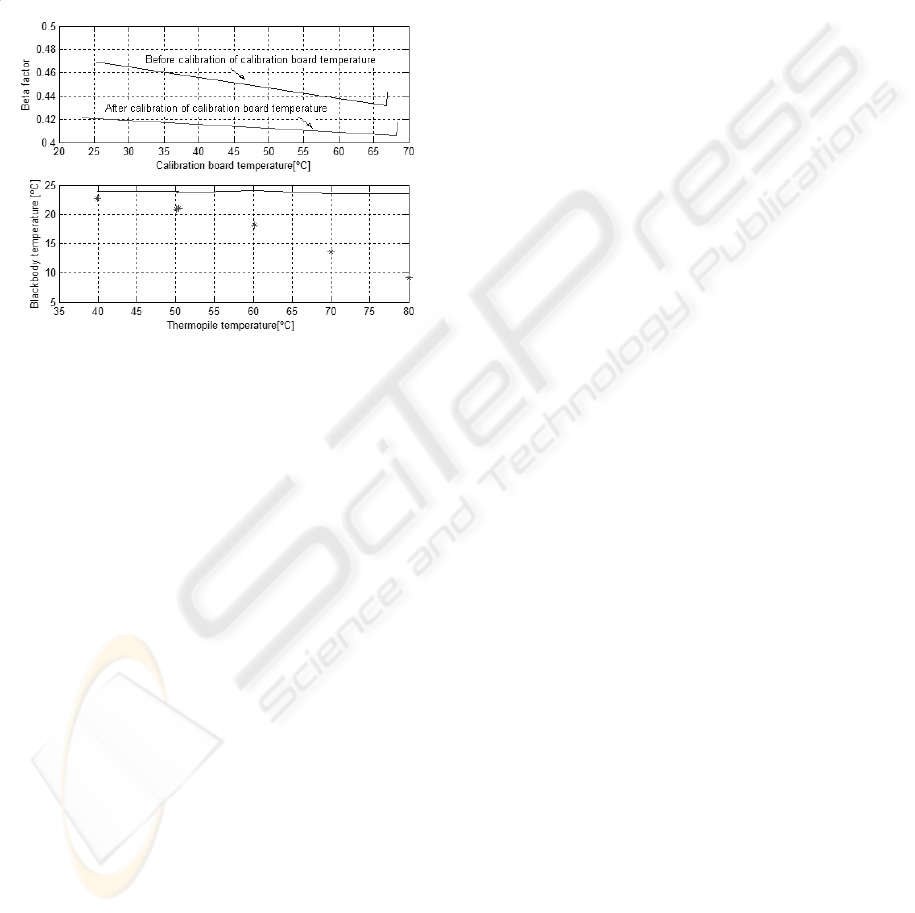
temperature of the thermopile was changed. Figure
6(bottom) shows the result after applying the
measurement algorithm (5) and solving for T
g
. The
high temperature error is due to the flight calibration
system is calibrating a small surface or annulus in
the external part of the thermopile filter, while the
filter surface used to measure the ground brightness
temperature is in the middle, and the deposition
appears to be no homogeneous. Thus, the
obstruction factor β is higher than the real one.
Figure 6: (top)Value of β factor. (bottom)Real blackbody
temperature (-), and measured blackbody temperature (*).
5 CONCLUSIONS
The thermopile mathematical model presented in
this paper is a valid and precise method to
characterize a thermopile, due to the low least-
squares error of 0.28K for an extensive thermopile
temperature range of almost 60K.
The FOV obstruction factor, generated by the
flight calibration board, reaches a value of 34%. It
can be reduced in order to increase the S/N ratio for
ground temperature signals.
The radiometric calibration of the flight
calibration board is necessary due to the error
introduced by different factors: the calibration of the
temperature sensor, the temperature homogeneity of
the calibration board and the position and anchoring
of the temperature sensor.
Dust deposition, based on dust electrical
characteristics, tends to form small balls around the
union between the thermopile can and window. This
is exactly the area calibrated by the flight calibration
board, justifying the higher value of β. As a future
work, a new calibration system, using a heated
cable, will be studied. The cable will cross the FOV
of the thermopiles, obstructing a homogenous part of
the FOV, and not only a ring in the most external
part. This will minimize the error generated by the
way dust is built up on the window.
ACKNOWLEDGEMENTS
The authors would like to express special thanks to
all members of the REMS project who in different
ways are collaborating in the development of REMS
GT-sensor.
REFERENCES
Richardson M., McEwan I., Schofield T., Smith M.
Souères P., Courdesses M. and Fleury S. 2004.
MIDAS Mars Ice Dust Atmospheric Sounder. MSL
proposal.
Vázquez L., Zorzano M.P., Fernández D., McEwan I.
2005. Considerations about the IR Ground
Temperature Sensor. CAB, REMS Technical Note 1-
101722005. Madrid.
Smith M.D. et al., 2004. First Atmospheric Science
Results from the Mars Exploration Rovers Mini.-TES.
SCIENCE EEE, 306, 1750-1753.
Martin T.Z. 1986. Thermal infrared Opacity Of The Mars
Atmosphere. Icarus, 66, 2-21.
www.ipht-jena.de. 2007. IPHT web page.
PRELIMINARY TESTS OF THE REMS GT-SENSOR
107
