
SPECIFICATION AND PROOF OF
LIVENESS PROPERTIES IN B EVENT SYSTEMS
Olfa Mosbahi and Jacques Jaray
LORIA, INRIA Lorraine, Nancy University, France
Keywords:
Automated systems, Event B method, Liveness properties, Language TLA
+
, Verification.
Abstract:
In this paper, we give a framework for defining an extension to the event B method. The event B method
allows us to state only invariance properties, but in some applications such as automated or distributed systems,
fairness and eventuality properties must also be considered. We first extend the expressiveness of the event B
method to deal with the specification of these properties. Then, we give a semantics of this extended syntax
over traces, in the same spirit as the temporal logic of actions TLA does. Finally, we give verification rules
of these properties. We denote by temporal B model, the B model extended with liveness properties. We
illustrate our method on a case study related to automated system.
1 INTRODUCTION
The paper deals with liveness properties of automated
systems. In such systems, we distinguish a software
part : the controller and an operative part formed by
a physical device and its environment.
The event B method provides us with techniques
and tools for specifying, refining, verifying invariant
properties and implementing systems. B is not well
suited to deal with liveness properties. We define an
extension of B in order to capture liveness properties.
We describe the syntax of the extension and define the
semantics in terms of traces in the same spirit of the
language TLA
+
. We also give the verification rules of
these properties.
Several related works concern B extensions for
capturing and proving liveness temporal properties. J-
R. Abrial and L. Mussat in (Abrial and Mussat, 1998)
proposed an extension consisting in a dynamic invari-
ant clause containing linear temporal logic formulae
(LTL). In order to allow verification by theorem prov-
ing, the user has to provide the model with decreas-
ing functions, a variant and a loop invariant. Such
items are necessary for the prover but are indeed not
part of the specification. Furthermore, finding vari-
ant and loop invariant is not an easy task. D.Bert
and R.Barradas (Barradas and Bert, 2002) have pro-
posed a method for the specification and proof of live-
ness properties in B event systems under fairness as-
sumptions. They give proof obligations in order to
prove basic progress properties in B event systems un-
der two types of assumptions : minimal progress and
weak fairness. They define proof obligations in terms
of weakest preconditions, which allow us to prove ba-
sic liveness properties as usual B proof obligations.
They suggest the use of UNITY ”Leadsto” operator to
specify more general liveness properties. The seman-
tics of these properties is defined in terms of weakest
preconditions but in our work, we give a semantics in
terms of traces.
The paper is organized as follows : section 2
presents an overview of the event B method, section 3
presents an overview of the language TLA
+
, section 4
gives a description of our proposal using a case study
: we give the syntax, the semantics of liveness proper-
ties and then the verification rules necessary to prove
these properties under fairness assumptions. Finally,
section 5 ends with a conclusion and future work.
2 OVERVIEW OF THE EVENT B
METHOD
The event B method (Abrial, 2003) is based on the B
notation (Abrial, 1996). It extends the methodologi-
cal scope of basic concepts such as set-theoretical no-
tations and generalized substitutions in order to take
into account the idea of formal models. Roughly
speaking, a formal model is characterized by a (finite)
list x of state variables possibly modified by a (finite)
list of events; an invariant I(x) states some properties
25
Mosbahi O. and Jaray J. (2007).
SPECIFICATION AND PROOF OF LIVENESS PROPERTIES IN B EVENT SYSTEMS.
In Proceedings of the Second International Conference on Software and Data Technologies - SE, pages 25-34
DOI: 10.5220/0001342400250034
Copyright
c
SciTePress
that must always be satisfied by the variables x and
maintained by the activation of the events. General-
ized substitutions provide a way to express the trans-
formations of the values of the state variables of a for-
mal model. An event consists of two parts : a guard
(denoted grd) and an action. A guard is a predicate
built from the state variables, and an action is a gen-
eralized substitution (denoted GS).
An event can take one of the forms shown in the
table 1. Let BA(x,x’) be the before-after predicate as-
sociated with each event shape. This predicate de-
scribes the event as a logical predicate expressing the
relationship linking the values of the state variables
just before (x) and just after (x
′
) the event ”execu-
tion”. In the table below, x denotes a vector built on
the set of state variables of the model. In the gen-
eral substitution x : p(x
0
, x), x denotes the new value
of the vector, whereas x
0
denotes its old value and t
represents a vector of distinct local variables.
Table 1: Event forms.
Event Before-after Guard
Predicate BA(x, x’)
BEGIN P(x, x
′
) TRUE
x : P(x
0
, x)
END;
SELECT G(x) G(x) ∧ Q(x,x
′
) G(x)
THEN x : Q(x
0
, x)
END;
ANY t ∃t.(G(t, x) ∃t.G(t, x)
WHERE G(t, x) ∧R(x, x
′
,t))
THEN x : R(x
0
, x,t)
END;
Proof obligations are associated to events and state
that the invariant condition I(x) is preserved. We next
give the general rule to be proved. It follows immedi-
ately from the very definition of the before-after pred-
icate, BA(x, x
′
) of each event :
I(x) ∧ BA(x, x
′
) ⇒ I(x
′
)
The B model has the following form :
MODEL hnamei
SETS hsetsi
CONSTANTS hconstantsi
PROPERTIES hproperties of sets and constantsi
VARIABLES hvariables xi
INVARIANT hinvariants I(x)i
ASSERTIONS hA(x)i
INITIALISATION hinitialization of variablesi
EVENTS heventsi
END
An abstract B model has a name; the clause SETS
contains definitions of sets; the clause CONSTANTS
allows us to introduce information related to the
mathematical structure. The clause PROPERTIES
contains the effective definitions of constants. The
clause ASSERTIONS contains the list of theorems
to be discharged by the proof engine. The clause
VARIABLES contains a (finite) list of state vari-
ables possibly modified by a (finite) list of events; the
clause INVARIANT states some properties that must
always be satisfied by the variables and maintained
by the activation of the events. The clause EVENTS
contains all the system events which preserve the set
of invariants.
2.1 Refinement
Construction by refinement (Back and v. Wright,
1998; Back and K-Sere, 1989) is a technique suitable
for the development of complex systems. The refine-
ment of a formal model allows us to enrich a model
in a step by step approach. It is used to transform an
abstract model into a more concrete version by modi-
fying the state description (Spivey, 1988). This is es-
sentially done by extending the list of state variables,
refining each abstract event into a corresponding con-
crete version, and adding new events.
The essence of the refinement relationship is that
it preserves already proved system properties. The in-
variant of an abstract model plays a central role for
deriving safety properties and our method focuses on
the incremental discovery of the invariant; the goal
is to obtain a formal statement of properties through
the final invariant of the last refined abstract model.
Atelier B (ClearSy, 2002), the toolkit supporting the
B method, generates the proof obligations associated
with a model or a refinement. It also provides au-
tomatic and iterative proof procedures to discharge
these proof obligations.
2.2 Example : A Parcel Sorting Device
In this section, we present an example of reactive sys-
tem : a parcel sorting device (Jaray and A.Mahjoub,
1996) which will be taken to illustrate our proposed
approach. We just give the abstract model of the sys-
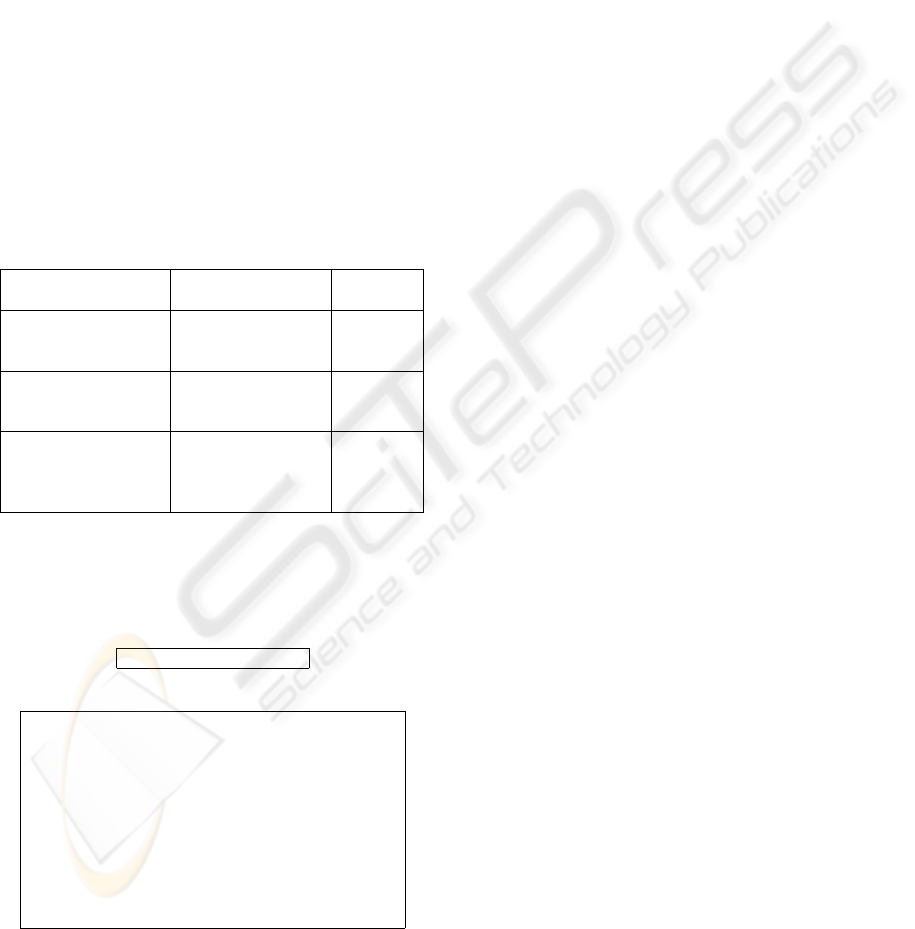
tem and not the refinement steps. The problem is to
sort parcels into baskets according to an address writ-
ten on the parcel. In order to achieve such a sort-
ing function we are provided with a device made of
a feeder connected to the root of a binary tree made
of switches and pipes as shown in the figure 1. The
switches are the nodes of the tree, pipes are the edges
and baskets are the leaves. A parcel, thanks to gravity,
can slide down through switches and pipes to reach a
basket.
A switch is connected to an entry pipe and two
exit pipes, a parcel crossing the switch is directed to
ICSOFT 2007 - International Conference on Software and Data Technologies
26
Feeder
0
1
2
3
4 5 6
7 8 9 10 11 12 13
14
1 2 3 4 5 6 7 8
Baskets
Figure 1: Router.
an exit pipe depending on the switch position. The
feeder releases one parcel at a time in the router, the
feeder contains a device to read the address of the par-
cel to be released. When released, a parcel enters
a first switch (the root of the binary tree) and slides
down the router to reach a basket. The controller can
activate the feeder and change the switches position.
For safety reasons, it is required that switch change
should not occur when a parcel is crossing it. In order
to check this condition, sensors are placed at the entry
and the exits of each switch.
We consider a simplified version of the system
with only safety properties to illustrate a specification
with the event B method and we will deal in the fol-
lowing with liveness properties (eventuality and fair-
ness) to explain our approach.
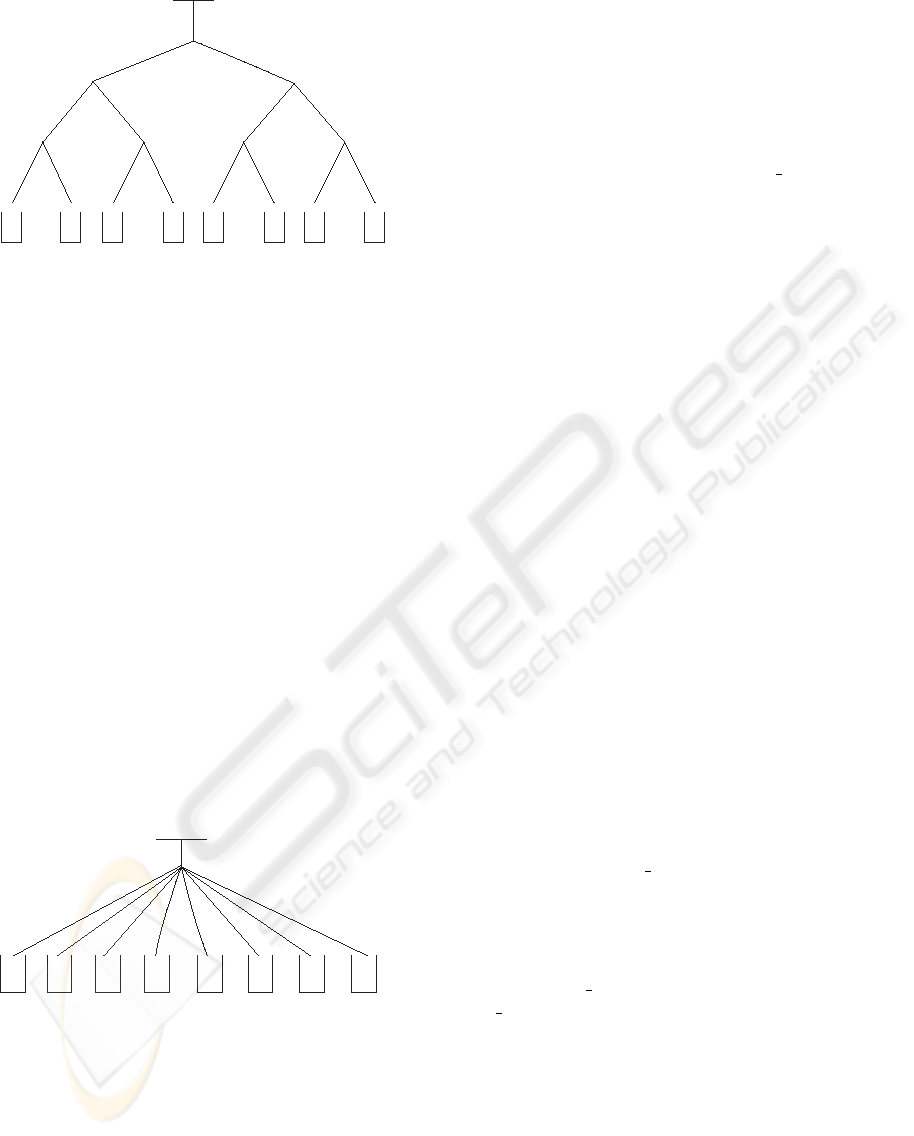
Abstract Model of the System
the abstract model of the system is given in the figure
2.
1 2 3 4 5 6 7 8
Baskets
channel
Feeder
Figure 2: Router.
The sorting device. The sorting device consists of a
feeder and a sorting layout. The feeder has two func-
tions: selection of the next parcel to introduce into the
sorting layout and opening the gate (releasing a par-
cel in the sorting layout). We introduce the events se-
lect and release to capture the two functions. In order
to produce the abstract model of the sorting layout,
we have to notice that a given state of the switches
forms a channel linking the entrance to a unique sort-
ing basket. A basket is an element of a set named
Baskets. Channels and sorting baskets are in a one
to one correspondence. Therefore, the abstract model
of the sorting device can be reduced to a single vari-
able channel taking the value of the sorting basket it
leads to, namely a value in the set Baskets. The chan-
nel value is changed by the event set
channel. It is
worth noticing that the abstraction forces a ”sequen-
tial functioning” of the sorting device, i.e. the value
of the channel remains unchanged as long as the par-
cel released in the sorting device has not reached a
sorting basket.
Parcels. Parcels, as part of the environment, are rep-
resented as elements of a set we name PARCELS. We
use a total function (adr) from PARCELS to the inter-
val Baskets to refer to the parcels address. We give
the status ”arrived” to the parcel which has reached
a sorting basket. The variable (arrived) is a function
from PARCELS to Baskets. The goal of the sorting
system is to decrease the set of the parcels to sort. The
variable sorted represents the set of sorted parcels.
The remaining parcels are defined by the expression
PARCELS - sorted named UNSORTED. As pe is un-
defined when the sorting device is empty, we have in-
troduced a set PPARCELS of which PARCELS is a
proper subset; pe is an element of PPARCELS and
assignment of any value in PPARCELS - PARCELS
stands for ”undefined”. The expression PPARCELS -
PARCELS will be referred as NOPARCELS. The se-
lection of a parcel is an event which may be activated
once the device is free and the variable pe is unde-
fined, which means it does not exist a parcel being
sorted.
Moving parcels. In our abstraction a parcel takes no
time to travel from the feeder to a basket. A parcel
arrives in the basket to which the channel leads up.
When the event cross
parcel occurs, the current par-
cel sorting is finished and then, of course, the current
parcel becomes undefined.
The Controller. The controller has to ensure right
parcel routing. Two events are added for the con-
troller : Set
channel and Release. The event
Set
channel assigns to channel the value of adr(pe).
The event Release changes the state of the sorting de-
vice from free to busy. The model of the automated
system is presented in Figure 3.
Simulation of the B model with ProB. We have used
ProB (Leuschel and Butler, 2003), witch is an simu-
lator and model checker for the (B/Event-B) Method.
It allows fully automatic animation of many B spec-
ifications, and can be used to systematically check a
specification for errors. ProB’s animation facilities al-
low users to gain confidence in their specifications,
SPECIFICATION AND PROOF OF LIVENESS PROPERTIES IN B EVENT SYSTEMS
27
MODEL Parcel Sorting
SETS PPARCELS ; SortingState = {free , busy }
CONSTANTS PARCELS, adr, Baskets
PROPERTIES
PARCELS ⊂ PPARCELS ∧ PARCELS 6= ∅ ∧
Baskets 6= ∅ ∧ adr ∈ PARCELS → Baskets
VARIABLES
arrived, channel, sorting, pe, sorted, ready
to sort
INVARIANT
arrived∈ PARCELS 7→ Baskets ∧ channel ∈ Baskets
∧
pe ∈ PPARCELS ∧ sorting∈ SortingState ∧
ready
to sort ∈ BOOL ∧ sorted ⊆ PARCELS ∧
(sorting = busy ⇒ channel = adr(pe)) ∧
(sorting = busy ⇒ ¬ ready
to sort) ∧
(ready
to sort ⇒ channel = adr(pe)) ∧
(ready
to sort ⇒ pe ∈ PARCELS) ∧
∀p.(p ∈ PARCELS ∧ p ∈ dom(arrived) ⇒
arrived(p) = adr(p))
DEFINITIONS
UNSORTED == PARCELS - sorted ;
NOPARCELS == PPARCELS - PARCELS
INITIALISATION
arrived := {} || channel :∈ Baskets || sorting := free
||
pe :∈ NOPARCELS || sorted := {} ||
ready
to sort := FALSE
EVENTS
select
parcel = ANY p Where p ∈ UNSORTED ∧
pe ∈ NOPARCELS ∧ sorting = free
THEN pe := p
END;
set
channel = SELECT sorting = free ∧ pe ∈
PARCELS
∧ ¬ ready
to sort
THEN channel := adr(pe) ||
ready
to sort := TRUE
END;
release = SELECT sorting = free ∧ pe ∈
PARCELS ∧
ready
to sort
THEN sorting := busy ||
ready
to sort := FALSE
END;
cross
parcel = SELECT sorting = busy
THEN arrived(pe) := channel ||
sorted := sorted ∪ { pe} ||
pe :∈ NOPARCELS || sorting :=
free
END
END
Figure 3: Abstract model of the sorting device.
and unlike the animator provided by the B-Toolkit,
the user does not have to guess the right values for the
operation arguments or choice variables. ProB con-
tains a model checker and a constraint-based checker,
both of which can be used to detect various errors in
B specifications. ProB enables users to uncover errors
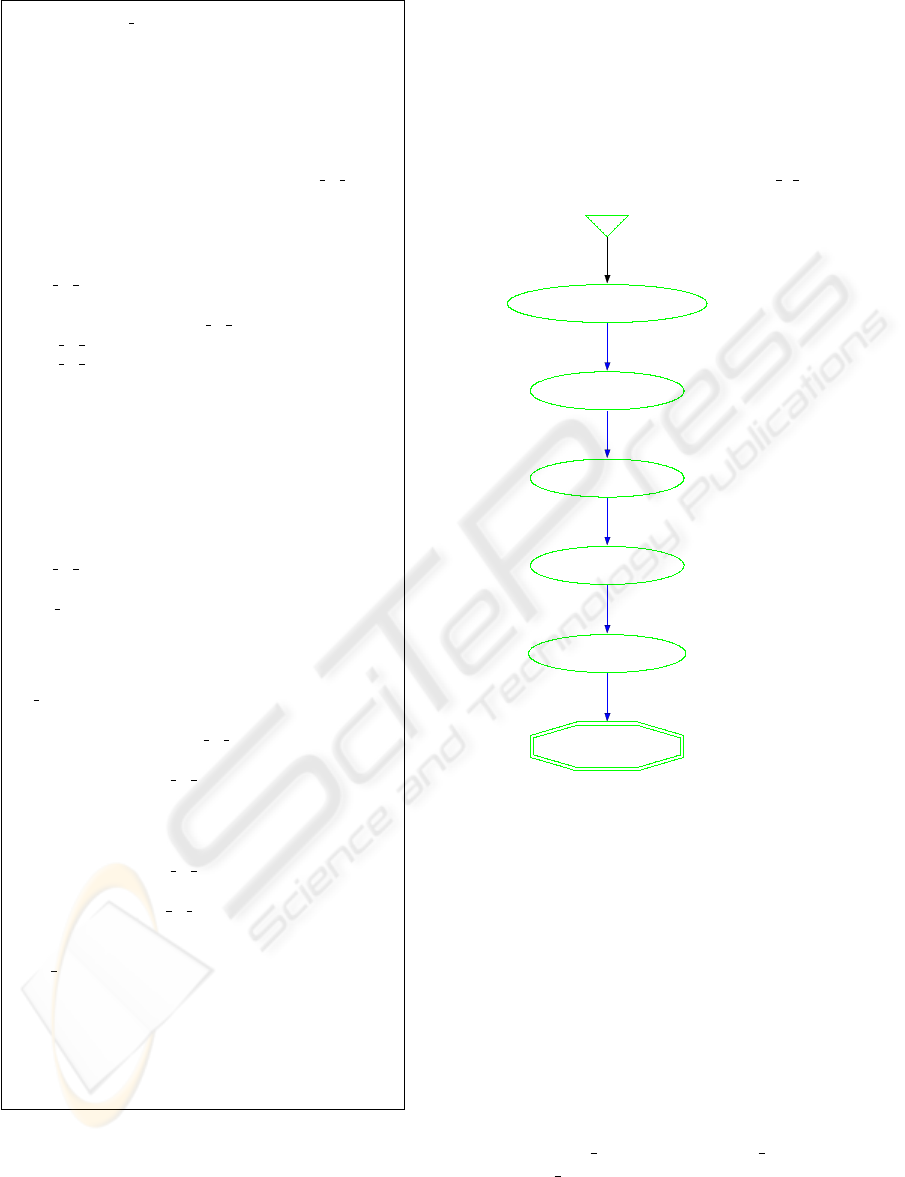
that are not easily discovered by existing tools. Fig-
ure 4, shows the simulation of the abstract model of
the system.
Verification of the B model . All generated proof
obligations are verified with the B click
n Prove tool.
setup_constants({q,r,s},{e,f,g,h},{(q,e),(r,f),(s,g)})
initialise_machine({},e,free,p,{},FALSE)
Select_parcel
set_channel
release
cross_parcel
PARCELS={q,r,s},Baskets={e,f,g,h},adr(q,e),
adr(r,f),adr(s,g)
arrived={},channel=e,sorting=free,
pe=p,sorted={}
arrived={},channel=e,sorting=free,
pe=q,sorted={}
arrived={},channel=e,sorting=free,
pe=q,sorted={},ready_to_sort
arrived={},channel=e,sorting=busy,
pe=q,sorted={}
channel=e,sorting=free,pe=p,
sorted={q},arrived(q,e)
Figure 4: Model checking of the router abstract model.
Requirement of liveness properties. In our example,
we need to consider the dynamics of the system. Our
model must take into account the following properties
1. Every parcel introduced in the entry eventually
reaches one of the baskets, this property is de-
scribed with :
∀p.(p ∈ UNSORTED ⇒ ♦arrived(p) ∈ Baskets)
2. Every parcel introduced in the entry must reach
the basket corresponding to its destination ad-
dress, this property is described with :
∀p.(p ∈ UNSORTED) arrived(p) = adr(p))
3. Weak fairness conditions on the events is assumed
: WF(select
parcel) ∧WF(cross parcel)∧
WF(set
channel) ∧WF(release)
These properties can not be specified in the clause
INVARIANT. We need to extend the expressivity of
event B to take into account such properties.
ICSOFT 2007 - International Conference on Software and Data Technologies
28

3 OVERVIEW OF THE
LANGUAGE TLA
+
TLA
+
is a language intended for the high level speci-
fication of reactive, distributed, and in particular asyn-
chronous systems. It combines the linear-time tempo-
ral logic of actions TLA (Lamport, 1994), and mathe-
matical set theory. The language has a mechanism for
structuring in the form of modules, either by exten-
sion, or by instance. The semantics of TLA is based
on behaviors of state variables. It can be viewed as a
logic built in an incremental way in three stages :
1. predicates whose semantics is based on states.
2. actions whose semantics is based on pairs of
states.
3. temporal formulas of actions whose semantics is
based on state behaviors of variables.
A TLA specification of a system denoted by
Spec(S) looks like : Init ∧ [Next]
x
∧ L where :
1. Init is the predicate which specifies initial states,
2. x is the list of all state variables and [Next]
x
means that either two consecutive states are equal
on x, x
′
= x (stuttering), or Next is an action (a re-
lation) that describes the next-state relation, usu-
ally written as a disjunction of more elementary
actions,
3. L is a fairness assumption (strong or weak) on
actions. WF
unprimed
var(S)
(S) defines the condi-
tion of weak fairness over the system S and
SF
unprimed var(S)
(S) defines the condition of strong
fairness over the system S, where primed
var(S)
are primed occurrences of the system variables x
and as is conventional, a primed occurrence v
′
of
a state variable v denotes the value of v in the
state following the transition described by Next.
unprimed
var(S) are unprimed occurrences of the
system variables x and an unprimed occurrence
denotes the value of a variable v in the state be-
fore the transition.
In the sequel we will focus on the extension of the
event B method with liveness properties, their syntax,
their semantics and verification rules.
4 ASSIGNING TEMPORAL
MEANING TO B MODELS
This section defines an extension to event B in order
to deal with liveness properties. The most important
construction we need is the ”leads to” eventuality op-
erator as in TLA and Unity which expresses require-
ments on behaviors, i.e. sequence of states. In order
to assess eventuality properties we must state assump-
tions on the fair occurrence of events. Such assump-
tions are stated using the TLA operators WF and SF.
WF(e) assumes that the event e is weakly fair, i.e. the
event e occurs infinitely often provided that it is even-
tually always enabled. SF(e) assumes that the event e
is strongly fair, i.e. the event e occurs infinitely often
provided that it is infinitely often enabled.
We indeed integrate some pieces of the language
TLA
+
into the event B models and we deal with proof
obligations of ”temporal” B models.
In the following, we start with the syntax of the
extension, then we give a semantics and verification
rules of liveness properties over traces as it is done in
TLA
+
. We suggest the use of TLA
+
operators because
the two methods are very close with respect to their
foundations.
4.1 Syntax of the Extension
In order to establish liveness properties we must as-
sume some progress conditions on the system. As
long as we have to verify that an event system sat-
isfies safety properties, it is sufficient to refer to a pair
of states (before and after states of a triggering event).
But in order to prove temporal properties we need
to introduce behaviors (sequences of states) starting
from the initial state and where two consecutive states
s
i
and s
i+1
are such that some event enabled in s
i
and
leads to the state s
i+1
.
Before defining the syntax of formulae which ex-
tends B expressivity, we start with some definitions.
State and rigid variables. The state of a system is
composed of a denumerable set of flexible or state
variables (V). Let (X) be a denumerable set of rigid
variables. These variables are not modified by pro-
gram transitions and hence keep the initially chosen
value during a program run (logical constant). A state
is a valuation of flexible variables.
Terms and States. A term t is defined recursively as
follows :
t ::= c | x | f (t
1
, ...,t
n
) where c is a constant, x is a
variable (x ∈ [V ∪ X]) , t
1
, ...,t
n
are terms and f is a
function symbol with arity n.
Atomic propositions. An atomic proposition ap is a
formula of the form :
ap ::= p(t
1
, ...,t
n
) where p is a predicate symbol with
arity n and t
1
, ...,t
n
are terms.
State predicates. A state predicate sp is a formula
defined by the following grammar
sp ::= ap | ¬sp | sp∨ sp | sp∧ sp | sp ⇒ sp | sp ⇔
SPECIFICATION AND PROOF OF LIVENESS PROPERTIES IN B EVENT SYSTEMS
29

sp | ∃x sp | ∀x sp.
In our extension, we introduce transition and live-
ness formulae.
Transition formulae. A transition formula describes
state transitions. A transition formula ac is a formula
of the form :
ac ::= GS(e) | [e]sp | heisp where e is an event,
GS(e) is its generalized substitution and sp is a state
predicate.
Safety properties. Safety properties are formulae of
the form
F ::= sp | (sp ⇒ sp) , where sp is a state predi-
cate.
Liveness properties. Liveness properties (fairness
and eventuality) are formulae defined as follows:
- Eventuality properties are expressed with formulae
of the form :
F G (F leads to G) defined as (F ⇒ ♦G)
and means that every F will be followed by G,
where F and G are formulae of the form : F ::=
sp | ♦F | F | WF(e)|SF(e).
Where sp is a state predicate, WF(e) and SF(e)
are respectively the weak and strong fairness of
the event e.
These properties are added in the clause EVEN-
TUALITY.
- Fairness properties are expressed with formulae of
the form :
- WF(e) defined as ♦grd(e) ⇒ ♦GS(e). It is
the weak fairness condition of an event e and
it means that the event e occurs infinitely often
provided that it is eventually always enabled,
- SF(e) defined as ♦grd(e) ⇒ ♦GS(e). It is
the strong fairness condition of an event e and
it means that the event e occurs infinitely often
provided that it is infinitely often enabled,
Where :
• e is a B event,
• grd(e) is the guard of this event e (state predicate),
• GS(e) is the generalized substitution of the event
e. It is a transition formula containing both
primed and unprimed occurrences of states vari-
ables, such as a before-after predicate.
These properties are added in the clause FAIRNESS.
4.2 Semantics of the Extension
In our extension, we deal with properties over state se-
quences (fairness and eventuality properties). This is
why we need a semantics over sequence of states and
have to explain how we can view events as a relation
over primed and unprimed variables and we will use
this point to find the extension of the event B method.
A system S is modelled as a set of possible events trig-
gering actions, when guards are true. An event e as it
was shown in the table 1, is defined by a guard de-
noted grd(e) (condition for triggering or enabledness
condition) and by a relation over a set of flexible vari-
ables (V) denoted GS(e) (relation stating the transfor-
mation of variables). According a TLA
+
module, we
consider three kinds of properties :
- State properties which denote properties on states
of the system S and are interpreted over states.
These properties are state predicates,
- Relational properties which denote relations on S
between pairs of states, which we call transition
formulae,
- Temporal Properties state properties over traces and
use state properties, relational properties and tem-
poral operators (, ♦, , ...), which we call live-
ness properties.
Properties are interpreted over traces (sequences
of states). We introduce notations for characterizing
systems :
- V is the set of state variables of the system S, v is a
state variable; x is the current value of v and x
′
is
the next value of v. Primed
Var(S) = {x
′
|v ∈ V}
and Unprimed
Var(S) = {x|v ∈ V}.
- Init(S) specifies the initial values of state variables
of the system S.
- Events(S) specifies the set of possible events of S;
it means that we list the possible events defined in
the figure 1. An event e is defined as follows :
e , grd(e) then GS(e)
- Next(S) is a formula over primed and unprimed
variables of S corresponding to the relation over
States(S), namely →, where States(S) is the set
of states of the system S. Next has the following
form :
Next(S) , R(e
1
)(x, x
′
) ∨.... ∨R(e
n
)(x, x
′
)
where R(e
i
)(x, x
′
) is a relation corresponding to
one of the event forms presented in the table 1.
R(e
i
)(x, x
′
) , P(x, x
′
) ∨ (G(x) ∧ P(x, x
′
)) ∨
(∃t.(G(t, x) ∧ P(x, x
′
,t)))
- → is a relation over States(S) simulating the execu-
tion of the system S.
- Invariants(S) is a set of properties over States(S)
invariant for S. ϕ is in Invariants(S), if
1. Init(S) ⇒ ϕ
ICSOFT 2007 - International Conference on Software and Data Technologies
30

2. ∀ s
0
, s
i
∈ States(S) : s
0
, ξ |= Init(S) ∧ (s
0
→
∗
s
i
) ⇒ s
i
, ξ |= ϕ
- Traces(S) is the set of traces (state sequences) gen-
erated from Init(S) using →. A trace is denoted
by σ = s
0
s
1
.....s
i
, ..... and satisfying the following
constraints :
1. s
0
, ξ |= Init(S) (the initial state s
0
satisfies the
initial condition),
2. ∀i ∈ N : (s
i
→ s
i+1
) ∨ (s
i
= s
i+1
) any two suc-
cessive states (s
i
, s
i+1
) either satisfy the before-
after predicate BA
e
(x, x
′
) for some event e and
some variables x, or agree on the values of all
system variables (called stuttering steps)
Let σ ∈ Traces(S), A property ϕ over states se-
quence of the system S is a state property, a relational
property or a temporal property; the semantics over
traces unified semantics over states and pairs of states
as follows :
1. a state property ϕ is a trace property as follows :
σ, ξ |= ϕ, if s
0
, ξ |= ϕ.
2. a relational property ϕ is also a trace property by
extending the semantics over pairs of states into
a semantics over traces as follows : σ, ξ |= ϕ, if
(s
0
, s
1
), ξ |= ϕ.
Temporal properties contains state properties,
relational properties and temporal combination of
these properties. Our extension is the same one than
TLA
+
and a system S is specified by the following
temporal expression :
Specification(S) , ∧ Init(S)
∧[Next(S)]
<unprimed
var(S)>
∧WF
unprimed
var(S)
(S)
∧SF
unprimed
var(S)
(S)
Where:
Init(S) states initial conditions,
[Next(S)]
<unprimed var(S)>
states how traces are
built,
WF
unprimed var(S)
(S) defines the condition of weak
fairness over the system S and
SF
unprimed
var(S)
(S) defines the condition of strong
fairness over the system S.
WF
unprimed
var(S)
(S) and SF
unprimed var(S)
(S)are
defined as follows :
WF
unprimed
var(S)
(S) ,
E∈WF Events(S)
WF
unprimed
var(S)
(E)
and
SF
unprimed
var(S)
(S) ,
E∈SF Events(S)
SF
unprimed
var(S)
(E)
Where WF Events(S) is the set of weakly fair
events and SF
Events(S) is the set of strongly fair
events. WF
unprimed
var(S)
(E) is the weak fairness
associated to the event E and SF
unprimed
var(S)
(E) is
the strong fairness associated to the event E. Each
event is associated with a fairness condition which
will be a weak or strong or undefined.
In the event B, BA
e
(x, x
′
) is the before-after pred-
icate for an event; this is a first-order formula built
from the constants declared for the system specifi-
cation, as well as primed and unprimed occurrences
of the system variables V. The before-after predi-
cate BA
e
(x, x
′
) in B method is interpreted by the for-
mula Next in TLA
+
. In TLA
+
, or an action e, the
enabled condition Enabled(e) is defined by existen-
tially quantifying over the primed occurrences of the
state variables; thus, the state predicate Enabled(e) is
true of those states that have a successor state related
by an occurrence of the event e.
Enabled(e) , ∃x
′
: BA
e
(x, x
′
).
The guard grd(e) in B is interpreted by the
condition Enabled(e) in TLA
+
.
We can summarize the semantics of temporal B
notations over traces by the following equivalences in
TLA
+
:
grd(e) , Enabled(e)
BA
e
, Next
Interpretation of formulae
Let σ = s
0
s
1
... be a behavior, i.e. a sequence of
states and ξ a valuation of the rigid variables of S.
Let [|x|]
ξ
s
i
be the value of the variable x in the state
s
i
, [| f(t
1
, ...,t
n
)|]
ξ
s
i
gives the semantics of the term
f(t
1
, ...,t
n
) in the state s
i
.
[|x|]
ξ
s
i
=
ξ(x) where x ∈ X;
s
i
(x) where x ∈ V.
[| f(t
1
, ...,t
n
)|]
ξ
s
i
= [| f|]([|t
1
|]
ξ
s
i
, ...., [|t
n
|]
ξ
s
i
)
In the following, we denote by s
i
, ξ |= sp the
satisfaction of the state predicate sp in the state s
i
of
a transition system and by σ, ξ |= F the satisfaction
of the temporal formula F over a trace σ ∈ Traces(S).
Proposition formulae
s
i
, ξ |= ap iff ap holds in the state s
i
State formulae
s
i
, ξ |= sp iff sp holds in the state s
i
SPECIFICATION AND PROOF OF LIVENESS PROPERTIES IN B EVENT SYSTEMS
31

Boolean formulae
s
i
, ξ |= ¬sp iff s
i
, ξ |= sp is false
s
i
, ξ |= sp
1
∧sp
2
iff s
i
, ξ |= sp
1
and s
i
, ξ |= sp
2
s
i
, ξ |= sp
1
∨ sp
2
iff s
i
, ξ |= sp
1
or s
i
, ξ |= sp
2
s
i
, ξ |= sp
1
⇒ sp
2
iff s
i
, ξ |= ¬sp
1
or
(s
i
, ξ |= sp
1
and s
i
, ξ |= sp
2
)
s
i
, ξ |= sp
1
⇔ sp
2
iff s
i
, ξ |= sp
1
⇒ sp
2
and
s
i
, ξ |= sp
2
⇒ sp
1
s
i
, ξ |= (∃x) sp iff (∃x) ∈ V : s
i
, ξ |= sp
s
i
, ξ |= (∀x) sp iff (∀x) ∈ V : s
i
, ξ |= sp
Transition formulae
(s, s
′
), ξ |= GS(e) iff s
e
→ s
′
s, ξ |= [e]sp
′
iff for every execution of the
event e, if s
e
→ s
′
then the state s
′
, ξ |= sp
′
This formula is satisfied by a state which evolves
to a state s
′
satisfying sp
′
for every execution of the
event e.
s
i
, ξ |= heisp
′
iff it exists an execution of the
event e, such that if s
e
→ s
′
then the state s
′
, ξ |= sp
′
This formula is satisfied by a state which can
evolve to a state satisfying sp
′
by the execution of the
event e.
Temporal formulae
We interpret a temporal formula on behaviors. In
the definitions below, σ|
i
, ξ |= F means that formula
F holds of the suffix of σ from point i onwards.
σ, ξ |= F iff σ|
i
, ξ |= F for all i ∈ N
The formula F asserts that F is true at all times
during the behavior σ.
Leads-to property F G
This formula asserts that every suffix satisfying
the temporal property F is followed by some suffix
satisfying the temporal property G.
σ, ξ |= F G iff for all i ∈ N, if σ|
i
, ξ |= F
then σ|
j
, ξ |= G for some j ≥ i
F G ≡ (F ⇒ ♦G) where ♦G = ¬¬G
Weak fairness property
A behavior is weakly fair for some event e iff e
occurs infinitely often provided that it is eventually
always enabled (WF(e) ≡ ♦ grd(e) ⇒ ♦GS(e)).
σ, ξ |= WF(e) iff it exists j ∈ N such that for
all i ≥ j, σ|
i
, ξ |= grd(e) then for all n ∈ N, it exists
m ∈ N such that for all k ≥ n+m, (s
i
, s
k
), ξ |= GS(e)
Strong fairness property
A behavior is strongly fair for some event e iff
e occurs infinitely often provided that it is infinitely
often enabled (SF(e) ≡ ♦ grd(e) ⇒ ♦GS(e)).
σ, ξ |= SF(e) iff for all i ∈ N , it exists
j ∈ N such that for all l ≥ i + j, σ|
l
, ξ |= grd(e)
then for all n ∈ N, it exists m ∈ N such that for all
k ≥ n+ m, (s
i
, s
k
), ξ |= GS(e)
4.3 Verification Rules of Liveness
Properties
In this section, we give verification rules (WF, SF and
LATTICE) to prove liveness properties under fairness
assumptions.
Under weak fairness
Let S be an extended B event system and
WF
EVENTS
(S) is the set of events of the system
S satisfying the weak fair assumption. Let [e]P be the
weakest pre-condition which ensures that P is true
after the execution of the event e. Let heiP(¬[e]¬P)
be the conjugate weakest pre-condition, i.e. the state
from which it is possible for an event e to ensure P.
The following rule is used to prove a leads-to formula
under a weak fairness assumption.
WF.
I ∧ P∧ ¬Q ⇒ [e](P∨ Q) for all event e of S
it exists an event e of S where :
I ∧ P∧ ¬Q ⇒ hei true∧ [e]Q
e ∈ WF
EVENTS
(S)
S |= P Q
In this rule, P and Q are state predicates, I is
the invariant of the B event system S. By the first
premise, any successor of a state satisfying P has
to satisfy P or Q, so P must hold for as long as Q
has not been true. By the second premise, it exists a
successor of a state satisfying P must satisfy Q and
ensures that in every state, the event e is enabled
(hei true means the feasibility condition of the event
e ), and so the assumption of weak fairness ensures
that e eventually occurs, unless Q has become true
before. Finally, the third premise ensures that e is an
event for which weak fairness is assumed.
Proof of a liveness property under weak fairness.
To see why the rule is correct, assume that
σ = s
0
, s
1
, ...s
i
, ... is a behavior satisfying
I ∧ WF
EVENTS
(S), and that P holds in s
i
. We
have to show that Q holds of some states s
j
with j ≥
i. Let s
0
be the initial state and s
i
satisfies P. Suppose
that no next state satisfies Q, so all next states must
satisfy P. By the second premise, it exists a successor
ICSOFT 2007 - International Conference on Software and Data Technologies
32

of a state satisfying P in which an event e is enabled
and always its execution carry out in a state satisfying
Q (contradiction). So, from a state s
i
satisfying P,
we can reach a state s
j
( j ≥ i) satisfying Q with the
execution of an event e under weak fairness.
Under strong fairness
Let S be a B event system and SF
EVENTS
(S) is the set
of strong fair events. As similar to the previous rule,
the following rule is used to prove a leads-to formula
from a strong fairness assumption.
SF.
I ∧ P∧ ¬Q ⇒ [e](P∨ Q) for all event e o f S
it exists an event e of S where :
I ∧ P∧ ¬Q ⇒ [e]Q
S |= (I ∧ P∧ ¬Q) ⇒ ♦grd (e)
e ∈ SF
EVENTS
(S)
S |= P Q
In this rule, P and Q are state predicates, I is
again an invariant, e is an event for which strong
fairness is assumed. We assume that σ is a behavior
satisfying I ∧ SF(e) and that P holds of a state
s
i
. We have to show that Q holds of some s
j
with
j ≥ i. By the first premise, any successor of a state
satisfying P has to satisfy P or Q. By the second
premise, it exists an event e ∈ S where its execution
from a state satisfying p evolves the system to a state
satisfying Q. The third premise ensures that in all
of these states, the event e is enabled, and so the
assumption of strong fairness ensures that eventually
e occurs, unless Q has become true before, in which
case we are done. Finally, the last premise ensures
that e is an event for which strong fairness is assumed.
Using LATTICE rule
The Lattice rule is used to verify complex liveness
properties using well-founded relations. (S, ≺) is
a binary relation such that there does not exist an
infinite descending chain x
1
≺ x
2
, ... of elements
x
i
∈ S. Fand G are temporal formulae.
LATTICE.
(S, ≺) is a well − f ounded relation over S
∀x ∈ S : F(x) G∨ (∃y ∈ S : (y ≺ x) ∧ F(y))
(∃x ∈ S : F(x)) G (x not f ree in G)
In this rule, x and y are rigid variables such that x
does not occur in G and y does not occur in F. The
second hypothesis of the rule is itself a temporal for-
mula that requires that every occurrence of F, for any
value x ∈ S, be followed either by an occurrence of G,
or again by some F, for some smaller value y. Be-
cause the first hypothesis ensures that there cannot be
an infinite descending chain of values in S, eventu-
ally G must become true. This rule allows us to de-
rive liveness properties by induction over some well-
founded ordering.
Other verification rules
P Q Q R
P R
(trans)
P Q R Q
P∨ R Q
(disj)
P ⇒ Q
P Q
(dedu)
P Q
(∃x : P(x)) (∃x : Q(x))
(exists)
These rules can be used to prove complex Leadsto
formulas.
Application to the example.
We try now to prove the following property :
∀p.(p ∈ UNSORTED) arrived(p) = adr(p)).
Let P ≡ ∀p.(p ∈ UNSORTED), Q ≡
arrived(p) = adr(p) and I be the invariant of
the system S. Let e be an event of S. We have :
I ∧ P ∧ ¬Q ⇒ [e](P ∨ Q) for all event e o f S.
With the event cross
parcel, we have :
I ∧ P ∧ ¬Q ⇒ hcross
parceli true∧ [cross parcel]Q
and e ∈ WF
EVENTS
(S). So by applying the rule WF,
we have S |= P Q.
5 CONCLUSION
In this paper, we have built an extension of the event
B method to deal with fairness and eventuality prop-
erties. We have proposed a semantics of the extension
over traces, in the same spirit as TLA
+
does and we
have given verification rules in the axiomatic of the
event B method.
In future work, we plan to define new required
proof obligations. Moreover, the B prover may not be
enough powerful for proving new proof obligations.
Future work will explore also, the question of the re-
finement and the properties of refinement, within the
extended language.
ACKNOWLEDGEMENTS
Thanks to Stephan Merz for comments on an earlier
draft of this paper.
REFERENCES
Abrial, J.-R. (1996). Extending B without changing it
(for developing distributed systems). In Habrias, H.,
editor, Proceedings of the 1st Conference on the B
method, pages 169–191.
Abrial, J.-R. (2003). B# : Toward a synthesis between Z and
B. In Bert, D., Bowen, J. P., King, S., and Wald
´
en, M.,
editors, ZB’2003 – Formal Specification and Devel-
opment in Z and B, volume 2651 of Lecture Notes in
SPECIFICATION AND PROOF OF LIVENESS PROPERTIES IN B EVENT SYSTEMS
33

Computer Science (Springer-Verlag), pages 168–177,
Turku, Finland. Springer.
Abrial, J.-R. and Mussat, L. (1998). Introducing dynamic
constraints in B. In Bert, D., editor, B’98 : The 2nd
International B Conference, volume 1393 of Lecture
Notes in Computer Science (Springer-Verlag), pages
83–128, Montpellier. Springer Verlag.
Back, R.-J. and K-Sere (1989). Stepwise refinement of ac-
tion systems. In Mathematics of Program Construc-
tion., pages 115–138, Berlin - Heidelberg - New York.
Springer.
Back, R.-J. and v. Wright, J. (1998). Refinement Calculus:
A Systematic Introduction. Graduate Texts in Com-
puter Science. Springer-Verlag.
Barradas, H. R. and Bert, D. (2002). Specification and proof
of liveness properties under fairness assumptions in B
event systems. In IFM, pages 360–379.
ClearSy (2002). Atelier b. Technical Note Version 3.6, Aix-
en-Provence(F).
Jaray, J. and A.Mahjoub (1996). Une mthode itrative de
construction d’un modle de systme ractif . TSI, 15. .
Lamport, L. (1994). The temporal logic of actions. ACM
Transactions on Programming Languages and Sys-
tems, 16(3):872–923.
Leuschel, M. and Butler, M. (2003). ProB: A model checker
for B. In Araki, K., Gnesi, S., and Mandrioli, D., edi-
tors, FME 2003: Formal Methods, LNCS 2805, pages
855–874. Springer-Verlag.
Spivey, J.-M. (1988). Understanding Z, A Specification
Language and its Formal Semantics. Tracts in The-
oretical Computer Science, 3. Cambridge University
Press.
ICSOFT 2007 - International Conference on Software and Data Technologies
34
