
TOWARDS A MULTIMODELING APPROACH
OF DYNAMIC SYSTEMS FOR DIAGNOSIS
Marc Le Goc and Emilie Masse
Laboratoire des Sciences de l'Information et des Systemes - LSIS, UMR CNRS 6168 - Paul Cezanne Aix-Marseille III
University, Avenue Escadrille Normandie Niemen, Marseille, France
Keywords: Modeling, Model Based Diagnosis, Dynamic Systems, Conceptual Model.
Abstract: This paper presents the basis of a multimodeling methodolog
y that uses a CommonKADS conceptual model
to interpret the diagnosis knowledge with the aim of representing the system with three models: a structural
model describing the relations between the components of the system, a functional model describing the
relations between the values the variables of the system can take (i.e. the functions) and a behavioural model
describing the states of the system and the discrete events firing the state transitions. The relation between
these models is made with the notion of variable: a variable used in a function of the functional model is
associated with an element of the structural model and a discrete event is defined as the affectation of a
value to a variable. This methodology is presented in this paper with a toy but pedagogic problem: the
technical diagnosis of a car. The motivating idea is that using the same level of abstraction that the expert
can facilitate the problem solving reasoning.
1 INTRODUCTION
This paper is concerned with the design of
knowledge based systems to supervise, diagnose and
control industrial process. The dynamic aspect of
industrial processes poses the difficult problem of
the acquisition and the representation of the
underlying temporal knowledge which is often
mixed with other types of knowledge (Basseville
and al, 1996).
To solve these problems, we first focus our
wo
rks on the multi model based diagnosis approach
(Chittaro and al, 1993) with the aim of designing
models at the same level of abstraction level than the
experts. Second, we want that the model formalisms
to be adequate to represent the temporal knowledge
coming from both from Experts and from the
learning algorithms of the Stochastic Approach of
(Le Goc et al, 2005). And three, we want the
interpretation knowledge to closed to the cognitive
tasks the models are made for and we propose to use
a generic conceptual models. So, section 2 of this
paper positions shortly our approach according to
the main modelling approaches for diagnosis.
Section 3 presents the basis of our methodology
through its application to a toy but pedagogic
problem: the technical diagnosis of a car. Finally,
section 4 states our conclusions and perspectives.
2 MODELLING APPROACHES
The limitations and the problems (Dagues, 2001) of
the heuristic approach (Clancey, 1985) has
motivated the Model Based Diagnosis approach
(MBD) where the knowledge about the system is
represented in a unique logical model (Reiter, 1987).
The MBD approach use of a unique model of the
sy
stem to be diagnosed containing the knowledge
about both the structure (components and
interconnections) and the behavior of the system
(relations between the values of the input and the
output of the components). This model generally
comes from the design model of the system so that it
contains a lot of components leading to
computational difficulties for the diagnosis task (the
number of potential diagnosis is exponential with the
number of components). This problem is crucial and
has motivate a large amount of works to reduce the
size of the space search. But more, this model
contains nothing about the evolution of the values of
the variables over time and nothing to represent the
knowledge about the state of the system. This is a
crucial lack when diagnosing a dynamic system
where the observations are timed.
The Multi Model Based Diagnosis (MMBD) has
been
proposed to avoid these problems (Chittaro and
al, 1993). This approach defines four models linked
277
Le Goc M. and Masse E. (2007).
TOWARDS A MULTIMODELING APPROACH OF DYNAMIC SYSTEMS FOR DIAGNOSIS.
In Proceedings of the Second International Conference on Software and Data Technologies - PL/DPS/KE/WsMUSE, pages 277-282
DOI: 10.5220/0001341702770282
Copyright
c
SciTePress
each other to describe the system to diagnose (cf.
(Zouaoui, 1998) and (Thetiot, 1999) for examples).
The first one is the Structural Model that describes
the components constituting the system and how
they are connected each other. The second model is
the Behavioral Model describing how components
work in terms of the physical laws linking quantities.
These two models represent the fundamental
knowledge. The third model is the Functional Model
describing the different roles the components may
play in the physical processes in which they take
part. The concept of function is the basis of the
description of the functional roles, the processes and
the phenomena that provides an interpretation of the
fundamental knowledge. The goals assigned to the
system by its designer(s) are described in the last
model, the Teleological Model. These two last
models refer to the interpretation knowledge.
Indeed, the MMBD is still concerned with the
computational problem of the diagnosis linked with
the number of the components declared in the
structural model (Zouaoui, 1998). This problem is
directly connected to the abstraction level which is
still defined by the designer(s).
3 MODELLING WITH EXPERTS
ASSUMPTIONS
So, our works is based on the hypothesis that an
expert uses a set of models at a level of abstraction
that allows efficient diagnosis reasoning and this
level of abstraction is directly linked with the
diagnosis task, not the design task.
We propose to use a CommonKADS conceptual
model (Schreiber and al, 2000) to interpret a
knowledge source with the aim of representing the
system with three models (Zanni and al, 2005): a
structural model describing the relations between the
components of the system, a functional model
describing the relations between the values the
variables can take (i.e. mathematical functions) and
a behavioural model describing the states of the
system (corresponding to the operating modes of
(Chittaro and al, 1993)) and the discrete events firing
the state transitions. The relation between these
models is made with the notion of variable: a
variable used in a function of the functional model is
associated with an element of the structural model
and a discrete event is defined as the affectation of a
value to a variable.
Left Node
Symbol
Relation
Symbol
Right Node
Symbol
Figure 1: Typical Binary Relation.
We define a model as an organized set of binary
relations B(S
l
, S
r
) between symbols S
i
denoting
objects described in the domain ontology of the
conceptual model of the knowledge. A binary
relation B(S
i
, S
j
) is also denoted with a symbol (i.e.
B). Such a binary relation only means that there exist
a link between the objects denoted with the symbols
S
i
and S
j
. A typical graphical representation of a
binary relation is provided in Figure 1, where nodes
are boxes or circles and the relation is eventually
represented with an ellipse. When useful, the arcs
can be oriented to show the orientation of a flow like
typically a flow of energy, material or information.
A model can then be represented with a graph
where nodes are symbols and arcs are relations.
Basically, a node symbol denotes a component or an
aggregate of components (i.e. a structure) in a
structural model, a variable in a functional model or
a state in a behavioural model. An arc represents a
link between two nodes. Such a link can be a
connection link between two structures in a
structural model, an information link between the
values of variables in a functional model or a
transition between two states in a behavioural
model. Consequently, a binary relation in a
structural model represents a connection between
two structures; a mathematical function in a
functional model and a transition between two states
in a behavioural model. It is to note that a set of
binary relations with the same right node symbol can
be aggregated in a single n-ary relation when this
aggregation is meaningful (an arithmetical function
between 3 variables for example).
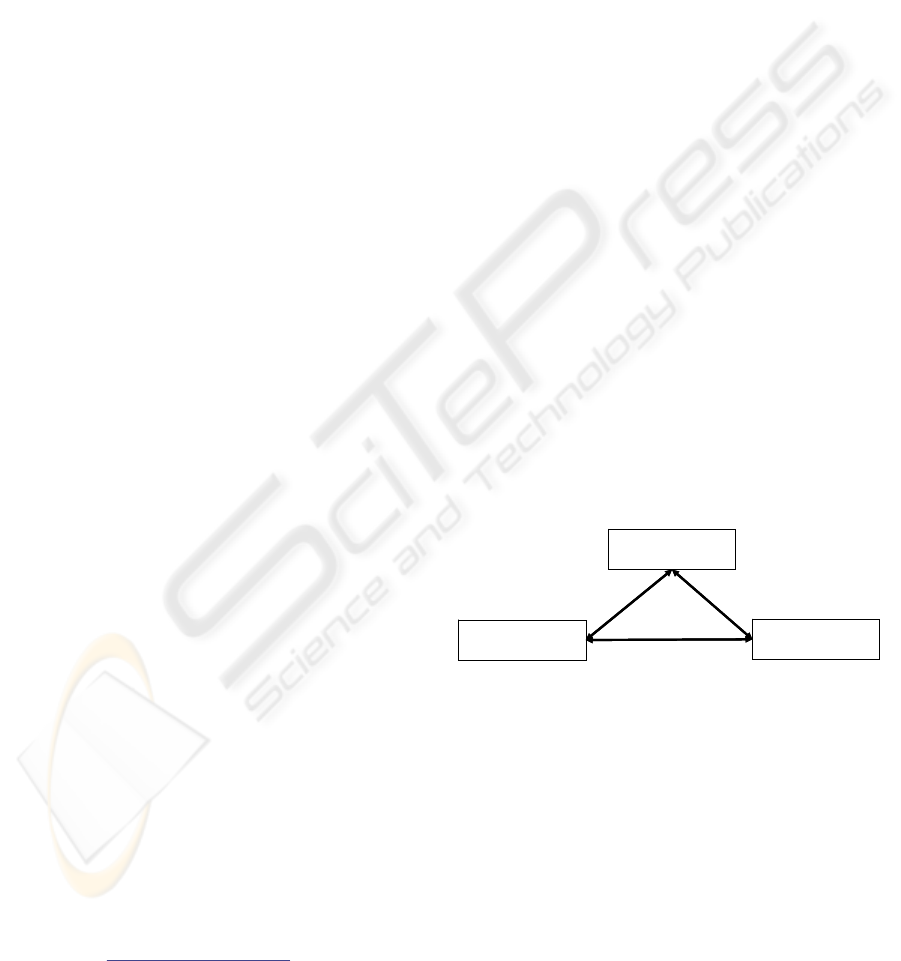
Functional
Model
Behavioral
Model
Structural
Model
(Structure, Event)
(Variable, Event)
(Variable, Structure)
Functional
Model
Behavioral
Model
Structural
Model
(Structure, Event)
(Variable, Event)
(Variable, Structure)
Figure 2: Links between the three models.
With this simple formalism, a structural model is
an organised set of physical relations between
components or aggregates, a functional model is an
organised set of logical relations defining the values
of a variable given those of a set of variables, and a
behavioural model is a set of sequential relations
between states. These sequential relations can be
conditioned with predicates concerning the
occurrence of discrete events. A discrete event is
defined according to spatial discretization principle
of the Stochastic Approach (Le Goc et al, 2005) as a
couple (x, i) where x is a symbol denoting a variable
ICSOFT 2007 - International Conference on Software and Data Technologies
278
and i is a value for x so that a discrete event
occurrence is triplet (x, i, t
k
) meaning: x(t
k
)=i.
The modelling is based on three principles. The
first is that each object symbol S
i
used in one of the
three models denotes a concept that is defined at the
domain level of a CommonKADS model. This
means that the introduction of an object symbol that
is not associated with an element of the knowledge
domain model is prohibited. This model provides
then the means for interpreting the three models. The
second principle is that a variable is always
associated with a component or an aggregate defined
in the structural model. The values a variable can
take are provided either from its associated
components (input variable) or are computed with a
function defined in the functional model. And the
third principle is that a transition between two states
is conditioned either with the time elapsed in a state
(autonomous transition) or with a logical formula
linking the occurrences of discrete events. The
notion of variable constitutes then the common point
of the three models (Figure 2), providing a means to
the consistency analysis of the models.
Fuse
blown
Battery
low
Fuel Tank
empty
Fuse inspection
broken
Battery dial
low
Gas in engine
false
Power
off
Engine behavior
does not start
Engine behavior
stops
R1 R2 R3 R4 R6
Gas dial
zeo
R5
R9R8
R7
Figure 3: An example of a knowledge base.
4 APPLICATION
To illustrate the modelling process using these
principles, let us take the example providing from
(Schreiber et al, 2000) of the (simple) knowledge
base used to diagnose a car.
Figure 3 proposes a graphical representation of
the set R={R
i
(P
c
, P
e
)} of the nine rules constituting
the knowledge base. In this graph, a rule R
i
(P
c
, P
e
)
denote a logical consequence relation from a
proposition P
c
to another P
e
. This logical relation is
used to represent a causal relation between a cause
(Fuel Tank empty) and an effect (Gas in engine
false). To interpret this knowledge, we will use the
classical and minimal CommonKADS diagnosis
template «hypothesis generation and hypothesis
discrimination» (Zanni and al, 2005). This template
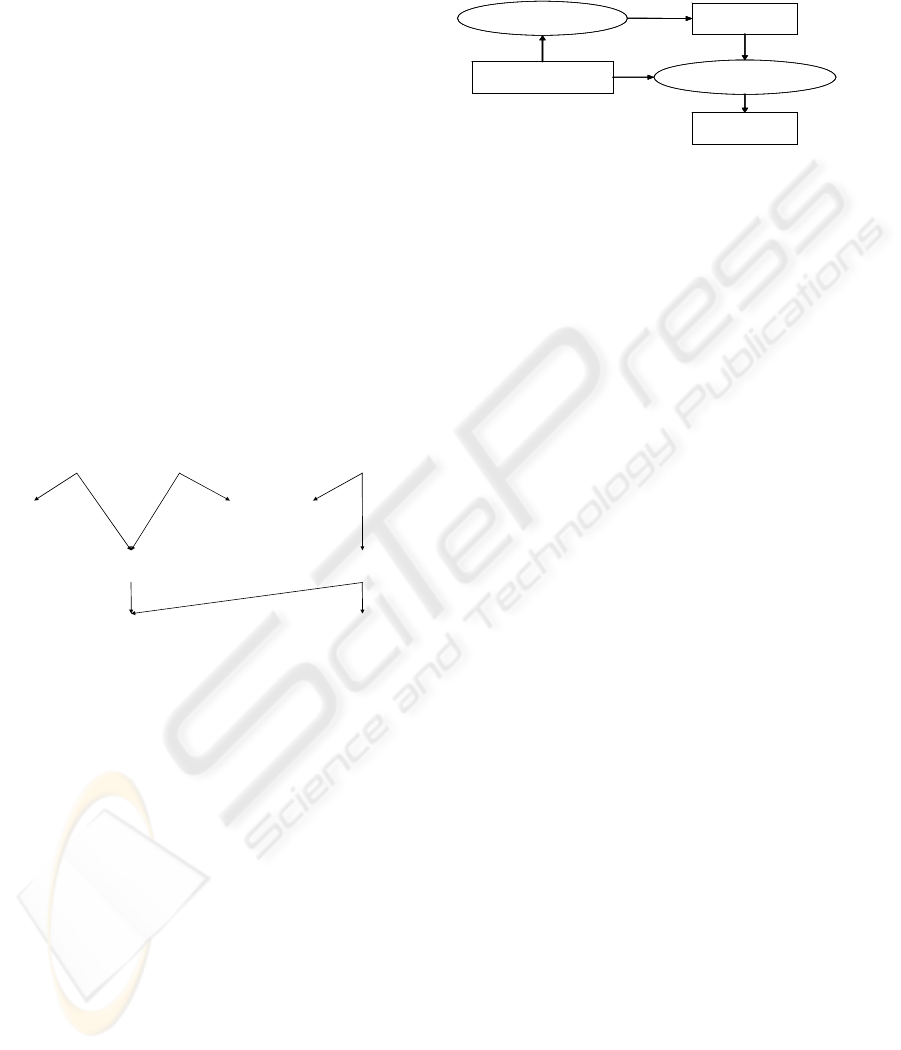
(Figure 4) considers the diagnosis reasoning as being
made of two basic inferences, one to generate the
hypothesis from the observed behaviour and the
second to discriminate between the different
hypotheses according to the observed behaviour.
hypothesis
observed behavior
generate hypothesis
discriminate hypothesis
diagnosis
hypothesis
observed behavior
generate hypothesis
discriminate hypothesis
diagnosis
Figure 4: The Diagnosis Template.
This template allows the classification of the
propositions contained in the knowledge base in a
set of observed behaviour (Fuse inspection broken,
Engine behaviour does not start, Engine behaviour
stops, Battery dial low and Gas dial zero) and a set
of hypothesis (Fuse blow, Battery low, Fuel Tank
empty, Power off and Gas in engine false). The
observed behaviour set contains the complains that
motivate the diagnosis reasoning (Engine behaviour
does not start, engine behaviour stops). This
functional classification of the propositions leads to
distinguish a first set of rules S1={R1, R4, R5} that
allows to observe unobservable states of the car
from the second set of rules S2={R2, R3, R6, R7, R8,
R9} that expresses the propagation of an
unobservable car state (Fuse blow, Battery low, Fuel
Tank empty ) to another unobservable car state
(Power off, Gas in engine false) and finally, to the
complains. So the propositions of R can be
interpreted as binary relations between a variable
(Fuel Tank for example) and a value (empty): each
proposition corresponds to a predicate
Equal(Variable, Value). Consequently, a rule is an
instantiation of a second order relation of the form
Cause(xi=v1, xj=v2) where the symbol “=” denotes
the predicate Equal, xi and xj denote a variable and
v1 and v2 two values. This relation means then that
there exist a logical relation between the fact xi=v1
and xj=v2 (i.e. a logical rule xi=v1⇒xj=v2) and
supposes that there exists a physical relation
between the variables xi and xj that is to say between
the components or the aggregates ci and cj the
variables xi and xj are linked with. The set X={xi} of
symbol variable associated with the set C={ci} of
symbol components can then be build, and the
knowledge base R can then be rewritten as follow:
•
R1: If x1=Blown Then x4=Broken
• R2: If x1=Blown Then x7=Off
• R3: If x2=Low Then x7=Off
• R4: If x2=Low Then x5=Low
• R5: If x3=Empty Then x6=Zero
• R6: If x3=Empty Then x8=False
• R7: If x7=Off Then x9=Does_not_start
• R8: If x8=False Then x9=Does_not_start
TOWARDS A MULTIMODELING APPROACH OF DYNAMIC SYSTEMS FOR DIAGNOSIS
279
• R9: If x8=False Then x9=Stops
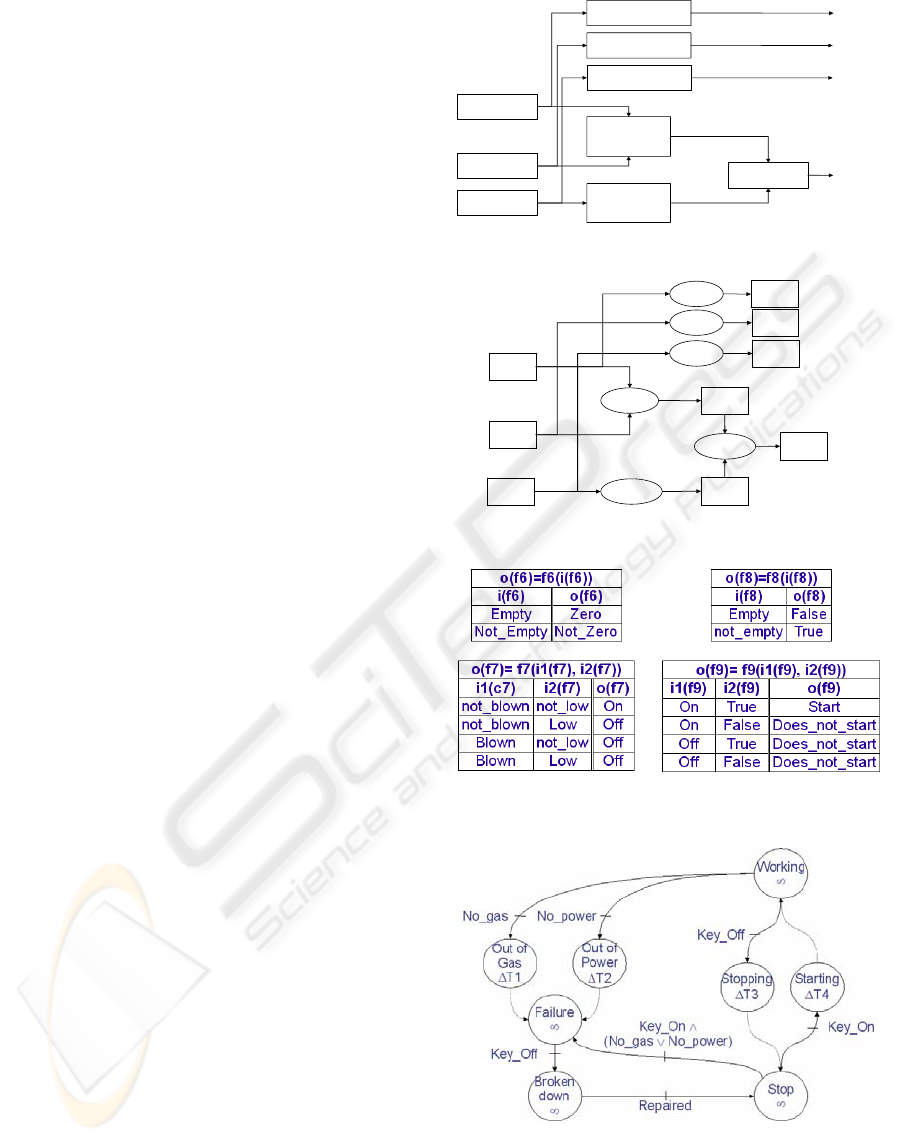
From these items, a set of connection relations of
the form ConnectedTo(ci, cj) can be deduced and
represented in the structural model of figure 5. The
symbol components electric_alimentation and
gas_alimentation, respectively associated with the
variables Power and Gas_in_engine, denotes
abstract aggregates of components. Similarly, the set
of underlying rules xi=v1⇒xj=v2 can be deduced.
When defining the domain set of value for each
variables, each rule xi=v1⇒xj=v2 subsumes a
function of the form xj=f(xi) at least defined when
xi=v1 and xj=v2. When two functions xj=fi(xi) and
xj=fk(xk, xj) share the same output variable xj, a new
function xj=fj(xi, xk) can be defined. In the
functional model of figure 6, a rectangle (node)
specifies a variable name and an ellipse (relation)
specifies a function names. When the value set of
each variable xi can be defined, the set F={fi} of
functions fi can be entirely specified with tables of
values. When a value is missing, it is always
possible to define the missing value as the
complement of the known values. For example, the
value set of the variable x1 is {Blown, not_Blown}.
The tables of figure 7 are formulated independently
of the variables, when using the notation o(f) and i(f)
to denote the value of the output and the input of the
function “f”.
To introduce the behavioural model, let us
consider the variable x9 associated with the
aggregate c9 (engine). The value set of x9 is {Off,
On} where Off means either stops or does not start.
The complains x9=Off can then be interpreted as an
undesirable car state and so, the predicate x9=On
corresponds to the desirable car state “the car is
working”. According to the set of rules R, the car
stay in this state until the occurrence of a discrete
event No_power (x7=Off) or No_gas (x8=False). In
this case, the car transit from a state Working to a
state Out of Power or Out of Gas, which are by
definition two transient states. As soon as the inertia
will have no effect, the car will stops in a Failure
state. When the ignition key will be off, the car will
be in a Broken down state where x9=Off: a repairing
action is required to bring back the car in a normal
Stop state. This analysis leads to the behavioural
model of Figure 8, which is a finite state machine
represented with the DEVS formalism (Le Goc et al,
2006). This formalism is compatible with the
formalism of Figure 1: nodes (circles) are states and
links are state transitions. Autonomous transitions
(between Out of Gas and Failure) are represented
with dashed lines. An autonomous transition is fired
when the elapse time in a state qi is greater than the
maximum duration ΔTi of the qi state.
c7
electric_
alimentation
c8
gas_
alimentation
c9
engine
c6
gas_dial
c5
battery_dial
c4
fuse_inspection
c1
fuse
c2
battery
c3
fuel_tank
R1
R2
R4
R3
R6
R5
R8 and R9
R7
Figure 5: Structural model.
f7
f8
f9
f6
f5
f4
x3
x1
x2
x8
x7
x9
x4
x5
x6
Figure 6: Functional model.
Figure 7: Specification of the functions.
Figure 8: Behavioural model.
The models of figures 5, 6, 7 and 8 are implicitly
contained in the initial knowledge base of figure 3,
ICSOFT 2007 - International Conference on Software and Data Technologies
280
but the behavioural model is the most “covered”.
Such an observation is very frequent because the
dynamic properties are generally misunderstood. For
example, the difference between the values stops
and does not start becomes clear only when
considering the role of the ignition key in the
behavioural model. It is to note also that the
behavioural model is made of two parts: one part (at
the right of figure 8) describes the normal working
of the car (Working, Stop, Starting and Stopping
states), and the second part (at the left of figure 8)
describes the abnormal working of the car. Such a
notion can not be defined with the functional model
because it is defined as an organized set of relations
between values of variables. This means that when
considering dynamic systems, the normal
behavioural model notion of Reiter’s diagnosis
theory for static systems has been shifted in the
classification of the system states in normal and
abnormal categories. This leads to design a new
algorithm for diagnosing dynamic systems.
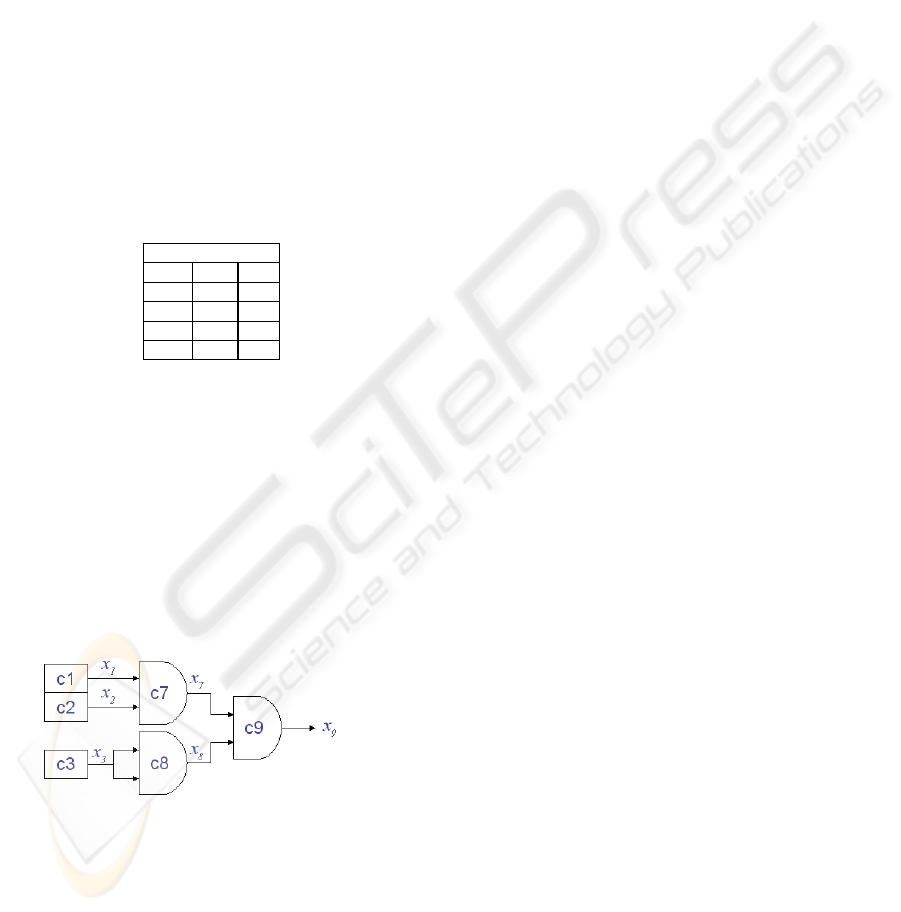
o
(f7)= f7(i1(f7), i2(f7
)
i1(c7) i2(f7) o(f7)
TTT
TFF
FTF
FFF
Figure 9: The f
7
function as an “AND” function
5 USING THE MODELS
The structural and functional models of figures 5, 6
and 7 can be used in Reiter’s diagnosis theory with a
simple logical transcription in the first order
predicate logic. The set of components COMPS is
deduced from the structural model:
COMPS={c1, c2,
c3, c4, c5, c6, c7, c8}
Figure 10: The nine rules as a logical circuit.
The system description SD is deduced from the
functional model when associating each function f
i
with the component c
i
corresponding to the output
variable of the function f
i
. For example, the function
f
7
is associated with the component c
7
through the
variable x
7
: x
7
=o(f
7
). Next, the symbols used to
specify the functions f
i
must be represented with the
Boolean symbols T for True and F for False. For
example, when rewritten the symbols not_Blown,
not_Low and Off as T and the symbols Blown, Low
and Off as F, the function f
7
become the logical
function AND (Figure 9). The same is true for the
functions f
8
and f
9
. Finaly, when considering the
components c
4
, c
5
and c
6
as sensors that can not
failed, this lead to consider the following logical
circuit of Figure 10. The system description is then:
SD = {
¬AN(x)∧FUSE(x) ⇒ o(x)=Not_blown,
¬AN(x)∧BATTERY(x) ⇒ o(x)=Not_low,
¬AN(x)∧FUEL_TANK(x) ⇒ o(x)=Not_Empty,
¬AN(x)∧AND_GATE(x) ⇒ o(x)=AND(i1(x), i2(x)),
//Component type declaration
FUSE(c1), BATTERY(c2), FUEL_TANK(c3),
AND_GATE(c7), AND_GATE(c8), AND_GATE (c9),
//Connexions
o(c1)=i1(c7), o(c2)=i2(c7), o(c3)=i1(c8), o(c3)=i2(c8),
o(c7)=i1(c9), o(c8)=i2(c9)
}
This model is not efficient for diagnosing
because, given the observations engine behaviour
stops or engine behaviour does not start, all the six
components will be suspected. Adding observation
as Gas dial zero reduces the problem, but to the
three components c7, c8 and c9, which can be
abnormal also.
Now, let us suppose that at time t
k
, the system is
in the Working state (Figure 8). The observation Gas
dial zero will be represented with the discrete event
occurrence (t
k
, x
6
, zero) (i.e. x
6
(t
k
)=zero). The
functional model provides the relations: x
6
=f
6
(x
3
) and
x
8
=f
8
(x
3
). Given the functional model (figures 6 and
7), x
6
(t
k
)=zero implies x
3
(t
k
-
τ
6
)=empty and x
8
(t
k
-
τ
6
+
τ
8
)=false corresponding to the occurrence of the
discrete event No_gas, where
τ
6
and
τ
8
are the time
transfer of functions f
6
and f
7
. The behavioural
model of Figure 8 shows then that the system will
transit from state Working to the state Out of gas at
time t
k
-
τ
6
+
τ
8
, and finally in the state Failure at time
t
k
-
τ
6
+
τ
8
+ΔT
1
. So, if at time t
n
>t
k
, the observation
engine behaviour stops is made on the car with t
n
≈t
k
-
τ
6
+
τ
8
+ΔT
1
, the observation Gas dial zero at time t
k
can be used to infer that the cause of this complain is
the fact that the fuel tank is empty since t
k
-
τ
6
.
This example shows that a diagnosis algorithms
adapted to the reasoning with timed observations is
required. The difficulty of this problem can be
perceived trough the formulae “t
n
≈t
k
-
τ
6
+
τ
8
+ΔT
1
”.
The symbol ≈ denotes a temporal equality predicate
that is generally interpreted as the fact that the time
t
n
belongs to a timed interval containing the time “t
k
-
τ
6
+
τ
8
+ΔT
1
”. The basic but fundamental problem is
then to define these intervals. The Stochastic
Approach for learning timed relations between
discrete events proposes a solution to this problem
TOWARDS A MULTIMODELING APPROACH OF DYNAMIC SYSTEMS FOR DIAGNOSIS
281

(Le Goc and al, 2005). This is the reason why one of
the main requirements for our modelling approach is
to be compatible with this approach of learning.
6 CONCLUSION
This paper presents the basis of a multimodeling
methodology that uses a CommonKADS conceptual
model to interpret the knowledge source with the
aim of representing the system with three models: a
structural model describing the relations between the
components of the system, a functional model
describing the relations between the values the
variables of the system can take (i.e. the functions)
and a behavioral model describing the states of the
system and the discrete events firing the state
transitions. The relation between these models is
made with the notion of variable: a variable used in
a function of the functional model is associated with
an element of the structural model and a discrete
event is defined as the affectation of a value to a
variable.
This methodology is presented in this paper with
a toy but pedagogic problem: the technical diagnosis
of a car with a given knowledge base (Schreiber and
al, 2000). This example shows that the resulting
models are compatible with Reiter’s theory of
diagnosis and that a specific reasoning is required to
take advantage of the behavioural model of the
dynamic system to diagnose. Such reasoning must
take into account the time of the observations. This
example illustrates clearly our goal: making explicit
the models used by experts to formulate their
knowledge. The idea is that using the same level of
abstraction that the expert can facilitate the problem
solving reasoning. This method has been applied to a
real world dynamic system, the Cubblize dam,
confirming the conclusions presented in this paper
and validating the method (Masse and Le Goc,
2007). It is to note finally that the resulting models
can be used either fore the design or the simulation
phases.
Our current work aims at formalizing the global
methodology and to design of a diagnosis algorithm
able to use a behavioural model that can be built
according to the timed relation the Stochastic
Approach of knowledge learning discovers.
REFERENCES
Basseville, M. and Cordier, M-O., 1996. Surveillance et
diagnostic de systèmes dynamiques : approches
complémentaires du traitement de signal et de
l’intelligence artificielle, office publication.
Bouché, P., Le Goc, M., and Giambiasi, N., 2005.
Modeling Discrete Event Sequences for Discovering
Diagnosis Signatures, Summer Computer Simulation
Conference, SCSC'05, Philadelphia, USA.
Clancey, W., 1985. Heuristic classification, Artificial
Intelligence Journal 25(3) 289-350.
Cordier, M.O., Dousson, C., 2000. « Alarm driven
monitoring based on chronicles », Proceedings of
SafeProcess 2000, pp.286-291, Budapest, Hungary.
Chittaro, L., Guida, G., Tasso, C., and Toppano, E., 1993.
Functional and teleological knowledge in the
multimodeling approach for reasoning about physical
systems: a case study in diagnosis. IEEE transactions
on systems.
Dagues, P., 2001. « Théorie logique du diagnostic à base
de modèles », in Diagnostic, intelligence artificielle et
reconnaissance des formes, Hermes, p. 17-105.
Le Goc, M., Bouché, P. and Giambiasi, N., 2005.
Stochastic modeling of continuous time discrete event
sequence for diagnosis. Proceedings of the 16th
International Workshop on Principles of Diagnosis,
DX-05, Pacific Grove, California, USA.
Le Goc, M., Bouché, P., Giambiasi, N., 2006. DEVS, a
formalism to operationnalize chronicle models in the
ELP Laboratory. Proceedings of DEVS’06, DEVS
Integrative M&S Symposium, Part of the 2006 Spring
Simulation Multiconference (SpringSim'06), pp. 143-
150, Van Braun Convention, Huntsville, Alabama,
USA, April 2-6 2006.
Masse, E., and Le Goc, M., 2007. Modeling Dynamic
Systems from their Behavior for a Multi Model Based
Diagnosis. To appear in the proceedings of the 18th
International Workshop on the Principles of Diagnosis
(DX‘07), Nashville, USA, Mai 29th to 31th 2007.
Reiter, R., 1987. A theory for Diagnosis from First
Principles, Artificial Intelligence 32, P 57-95.
Schreiber, A. Th., Akkermans, J. M., Anjewierden, A. A.,
de Hoog, R., Shadbolt, N. R., Van de Velde W.,
Wielinga B. J., 2000. Publication, Knowledge
Engineering and Management, The CommonKADS
methodology, MIT Press.
Thetiot, R., 1999. PhD in Sciences, Utilisation de
l’approche multi-modèles pour l’aide au diagnostic
d’installations industrielles, Université d’Evry Val d’
Essonne.
Zanni, C., Le Goc, M., Frydman, C., 2005. Publication, A
conceptual framework for the analysis, Classification
and choice of knowledge-based diagnosis systems,
International Journal of Knowledge-Based &
Intelligent Engineering Systems (KES Journal), IOS
Press Eds., 41 p.
Zouaoui, F., 1998. PhD in Sciences, Aide à
l’interprétation du fonctionnement des systèmes phy-
siques en utilisant une approche multi-modèles.
Application au circuit primaire d’une centrale à eau
pressurisée, Université de Paris XI – Orsay.
ICSOFT 2007 - International Conference on Software and Data Technologies
282
