
PET-TYPE ROBOT COMMUNICATION SYSTEM FOR MENTAL
CARE OF SINGLE-RESIDENT ELDERIES
Toshiyuki Maeda
Department of Management Information, Hannan University
5-4-33, Amamihigashi, Matsubara, Osaka, 580-8502 JAPAN
Kazumi Yoshida, Hisao Niwa and Kazuhiro Kayashima
Pin Change Co.,Ltd.
2-4-5, Minamishinagawa, Shinagawa, Tokyo, 140-0004 JAPAN
Keywords:
Telecare network application, Elderies’ welfare, Human-computer interaction, Human-robots interface, Net-
work communication, Pet-type robot, Autonomous control
Abstract:
This paper presents a pet-type robot communication system for mental care of single-resident elderies. The
robot can communicate with the people autonomously, and also it is Internet-accessible and so that allows the
people to communicate with others, directly or using the communication server. The system consists of pet-
type robots and the information center. The pet-type robot can treat not only as an information terminal, but
as a pet, which can talk to user(s), give information of the local communities, watch over them and send some
information to carers at the information center if needed. Considering necessity and sufficiency, the robot has
four motors; one for both ears, one for both eyes, one for the nose, and one for the neck. Motions generated
by the motors symbolize emotions of the robot, which is essential for our object. We have demonstrated and
examined some features of this robot system for elderies and got some good evaluation.
1 INTRODUCTION
Recently, the rate of elderies is getting higher and
higher and, in accordance with that, welfare facilities
and tools using advanced technologies have been de-
veloped(Bolmsj et al., 1995; Clarkson et al., 2003).
Many of them are, however, for aiding persons with
manipulation disabilities, or for supporting physical
works of carers and elderies, but for mental activi-
ties. Especially in Japan, single-resident elderies tend
to be isolated with local communities which may lead
loneliness of those, and so it is very important to com-
municate those elderies with others on mental aspect.
Pet-type robot system is one important candidate to
solve those sorts of humane problems, and there have
already been several researches(Matsukawa et al.,
1996; Maeda et al., 2002; Ohkawa et al., 1998; Maeda
et al., 2003), though they are not focussed enough.
We here introduce a new pet-type robot communica-
tion system which consists of pet-type robots and the
information center.
In this paper we explain some concept and features
of our system, and later we discuss some examination.
We here have demonstrated and examined some fea-
tures of this robot system for elderies, using some of
the robots, and certified some effects of our system.
Relievability & Reliability
Interface for
aged people
Mental care
Conversation
Button
Communication
Information Interchange
announce
Conversation robot
type terminal
Network accesibility
Pet-type
Information terminal
Figure 1: System concept.
2 CONCEPT OF PET-TYPE
ROBOT COMMUNICATION
SYSTEM
Figure 1 shows the basic concept of our system. In
the following subsections, we explain each aspect in
detail.
322
Maeda T., Yoshida K., Niwa H. and Kayashima K. (2004).
PET-TYPE ROBOT COMMUNICATION SYSTEM FOR MENTAL CARE OF SINGLE-RESIDENT ELDERIES.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 322-325
DOI: 10.5220/0001139003220325
Copyright
c
SciTePress
2.1 Interface Usability
Pet-type robots should satisfy following requirements
with view of elderies’ usability:
(i) They should not give a feeling of machines,
or electronic equipments. For elderies, those
“Hard” equipments are very tough to touch, and
that causes not to use frequently.
(ii) They should be able to give some conversation
with contact and/or speech, that let users feel
kind, or easy to communicate.
(iii) They should not force users to use.
To solve above problems, we introduce the follow-
ing features:
(i) We designed robots body as stuffed toy bears.
That enables robot to be more emotional, which
is essential for pet-type robots(Fujita, 1999).
(ii) We have developed speech input (recognition)
and speech output (synthesis or construction),
and other multi-modal interface for conversation
(explained below). Those techniques realize be-
havior of pets, and also offer affordance(Gibson
and Walk, 1960).
(iii) We designed user interface as easy and simple as
possible. For instance, a user does not need to
operate any mechanical equipment for telecom-
munication such as making a telephone call (dis-
cussed below).
2.2 Elderies’ information terminal
The robot should, furthermore, treat as an informa-
tion terminal as well as a fake pet. For realizing
those requirements, the robot is net-accessible and
that feature allows the people to communicate not
only with carers, but also with relatives, friends, etc.
That is quite important for elderies, especially single-
resident, not to feel alone. As described, communica-
tion is very important for our system and we discuss
as below in details.
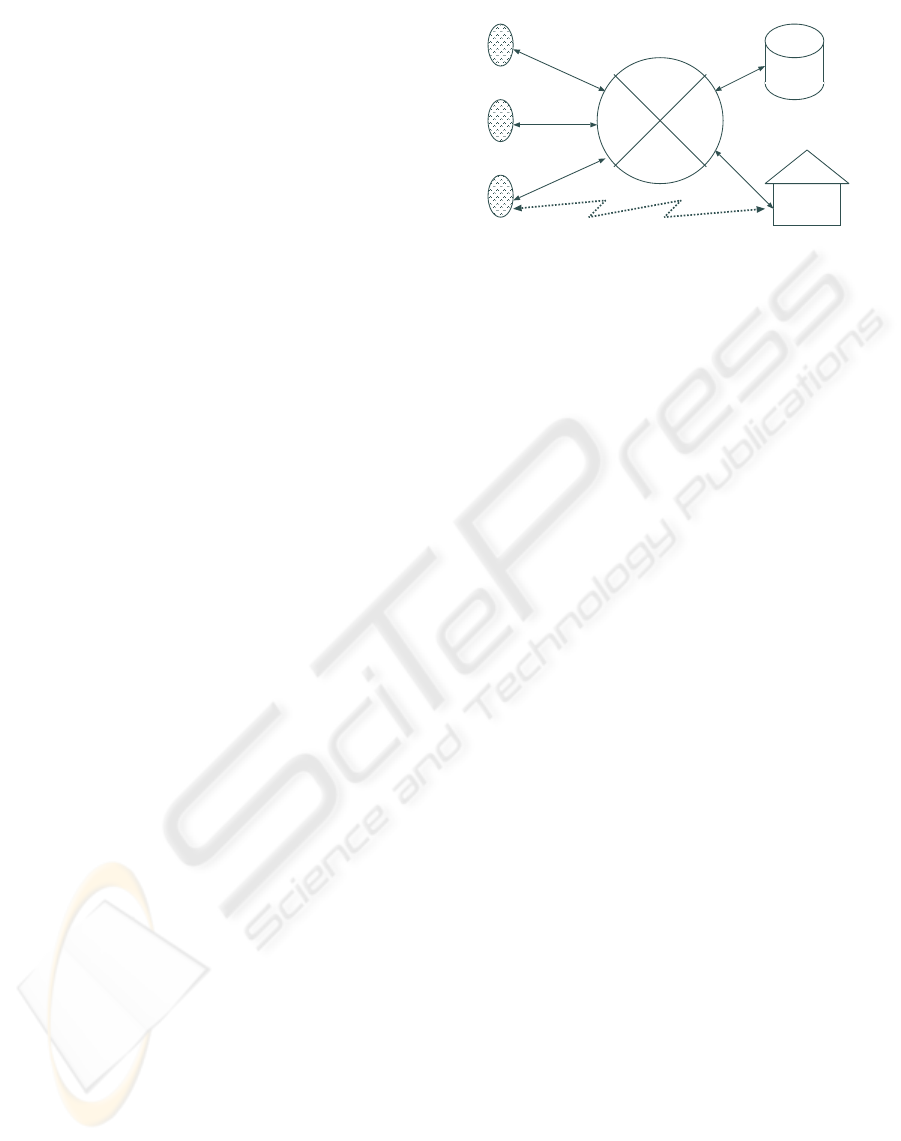
3 COMMUNICATION FEATURES
Figure 2 shows the network diagram of our system.
All robots, or terminals, are connected to Internet,
which means the robots are regarded as Internet-
accessible terminals. Furthermore, those treat a tele-
phone if required. In the following subsections, func-
tions are described.
pet1
pet2
pet3
Internet
Information Center
family/friend/...
(mobile) phonecall
Figure 2: System network diagram.
3.1 Internet connectivity
We have several versions of robot systems. Some are
connected to Internet by cable TV networks, and oth-
ers by cellular phone. The latter systems are aimed
for portability as pseudo-pets.
3.2 Communication for surveillance
The robot has a camera to watch over user(s). Images
can be taken by the camera, and are sent to the infor-
mation center via Internet. That helps carers to get
informations easily for watching over. The robot can
send images in regular intervals, and that offers some
of continual watching, or lifeguard.
3.3 Multi-modal interface
Speech techniques are, furthermore, used to some in-
formation exchange with the robot. Those speech
operation makes those people feel naturally and
friendlily, and then improves usability very much.
The current system supports the following invocation
of communication;
• “Telephone button ON!”: by this speech command,
a user can take a telephone call, or catch a call.
• “Tell!”: supports voice mails. At that time, a
user can choose “(normal) mails”, or “special (mes-
sages)”.
• “Bulletin board!”: opens voice BBS. In the situa-
tion, a user can designate “Answer” for followup
of others’ message, or “Question” for invocation of
new a thread (theme or topic) in the BBS.
Those are mainly for communication with others
through Internet and/or telephone networks, which
helps user(s) to communicate with relatives and
friends easily, as there are still some amount of people
who are not Internet-accessible.
PET-TYPE ROBOT COMMUNICATION SYSTEM FOR MENTAL CARE OF SINGLE-RESIDENT ELDERIES
323
3.4 Autonomous conversation
Besides networking communication, autonomous
communication is strongly required for single-
resident elderies user, as the pet robot could be a
partner and then that may avoid the user from loneli-
ness. Autonomous communication consists of speech
recognition and speech generation. Speech media are
very useful for elderies, who are not accustomed to
use computers straightforwardly.
The robot at the moment can tell his name, current
date/time to the user(s). The robot can also use over
200 Japanese words, including
• “Good morning!”,
• “Wake up!”,
• “Bye Bye”,
• etc.
If a user talk to the robot “Wake up!”, the the robot
talks back to the user the greeting and gives one ar-
bitrary health advice at random, which give user(s)
some feelings of “live creature”. Furthermore, for the
purpose of getting friendly, the robot can sing several
short songs.
Note that those speech is not synthesized but just
composed from parts of speech pieces, which were
previously recorded and edited from human speech.
This composed method found to be more natural to
listen to, and that leads quite important characteris-
tics for elderies to be easy to communicate rather than
synthesized ones.
4 SYSTEM ARCHITECTURE
To reinforce interaction, including communication
with user(s), more naturally and friendlily, the robot
has some sensors and motors.
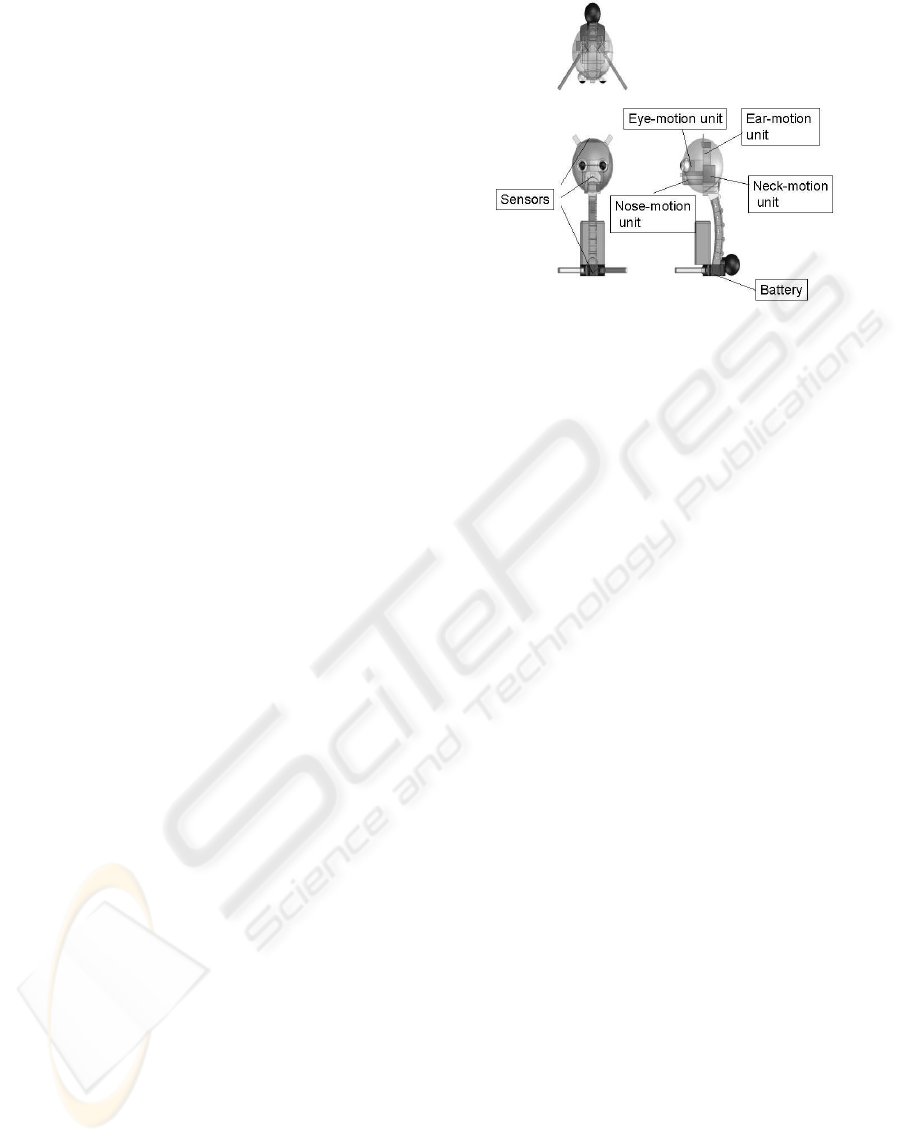
Figure 3 presents functions of the robot skeleton.
Those components enable the robot to behave
much more like a real (living) pet, which afford to be
more friendly and easy to contact (Gibson and Walk,
1960).
Sensors work for catching some signals of friend-
liness, which makes the robot cheer up/down, as well
as for interrupting its action, speech, etc. Considering
necessity and sufficiency, the robot has four motors;
one for both ears, one for both eyes, one for the nose,
and one for the neck. Motions generates by those mo-
tors symbolize emotions of the robot, which is essen-
tial for our object. For instance, the head, followed by
neck, can move vertically, which imply the emotion
of bowing, and horizontally, which imply negation.
The robot consists of two units, stuffed toy unit and
control unit, and those two are connected by a serial
line. the toy (doll) part has motors and sensors, and
Figure 3: Functions of the skeleton.
motion commands and sensed signals are sent to the
control unit. To afford user(s) to use easily, or pleas-
antly, a camera is embedded into a toy camera, mi-
crophones are set at both ears, and a speaker is set
just under the mouth.
To/from the information center, communication, or
information interchange is done through the Internet.
Telephone calls are not to use VoIP protocol, but done
using facility of cellular phones through public tele-
phone network.
5 DISCUSSION
We have examined a field test in Ikeda-city in Japan.
Targets are 7 single-resident elderies, 3 males (ave.
83 years old) and 4 females (ave. 78 years old). Each
person use the pet-type robot ave. 62 days, and in
that period we have done 4 interviews and 2 question-
naires.
Table 1 presents questionnaire results, where “Q”
stands for Questions, “V” for “Very good”, “G” for
“Good”, “N” for “Not so good”, and “B” for “Bad”.
It actually shows our system can be used quite well,
though it is not complete. Especially, the item of “un-
derstanding” is not of good point which may cause
from insufficiency of speech recognition, and thus the
function of speech recognition and autonomous con-
versation should be improved.
Table 2 shows statistics of conversation data, de-
rived from log-messages in the center (server). The
system is used Approximately each two days, which
seems to be moderate. Users turn on the switch
twice a day, which may causes from mail checking
on morning and evening . Conversation time is about
6 minutes, and it may be enough for get and give in-
formation. Conversation success rate is counted by
hand from logs of the server. 46.8 % is not so good
ICINCO 2004 - ROBOTICS AND AUTOMATION
324

Table 1: Questionnaire results
Q V G N B
How frequently do you think
the robot understand you?
0 0 6 1
Do you feel the design of the
robot is good?
2 3 0 2
Does the robot speak well? 2 3 2 0
How do you feel by listen-
ing to the delivered messages
from the center ?
4 2 1 0
Do you feel friendliness with
the robot?
2 3 1 1
Do you think you feel lonely
without the robot?
2 2 1 2
Table 2: Usability statistics.
Item Average
Active rate (actual used
days per monitored days)
49%
Power-on frequency (per
day)
1.9 times
Conversation time (per
one conversation)
5 minutes 55 seconds
Conversation success
rate
46.8%
and we have to improve this factor.
6 CONCLUSION
We developed a pet-type robot communication sys-
tem including the information center, and certify
some of our system’s effect.
We need more field tests for analyzing our system
more precisely, as we have not done enough amount
of examinations. Furthermore the contents, which
consists of conversation sets and speech programs,
should be reconsidered for the more comfortable and
pleasant interaction.
ACKNOWLEDGEMENT
Part of this study was supported by Telecommunica-
tions Advanced Organization of Japan. For field test,
we have collaboration with Ikeda-city and Sawayaka
Kousha in Osaka Prefecture in Japan. We greatly ap-
preciate those support and collaboration.
REFERENCES
Bolmsj, G., Neveryd, H., and Eftring, H. (1995). Robotics
in Rehabilitation. IEEE Transactions on Rehabilita-
tion Engineering, 3:77–83.
Clarkson, J., Coleman, R., Keates, S., and Lebbon, C., ed-
itors (2003). Inclusive Design: Design for the whole
population. Springer-Verlag UK.
Fujita, M. (1999). Emotional Expressions of a Pet-
type Robot. Journal of Robotics Society of Japan,
17(7):947–951.
Gibson, E. J. and Walk, R. D. (1960). The Visual Cliff.
Scientific American, 202:64–72.
Maeda, T., Yoshida, K., Kayashima, K., and Maeda, Y.
(2002). Mechatronical Features of Net-accessible Pet-
type Robot for Aged People’s Welfare. In Proceedings
of the 3rd China-Japan Symposium on Mechatronics,
pages 212–217.
Maeda, T., Yoshida, K., Niwa, H., Kayashima, K., and
Maeda, Y. (2003). Net-accessive Pet-Type Robot for
Aged People’s Welfare. In Proceedings 2003 IEEE In-
ternational Symposium on Computational Intelligence
in Robotics and Automation (CIRA 2003), pages 130–
133.
Matsukawa, Y., Maekawa, H., Maeda, T., and Kayashima,
K. (1996). A Appearance for affordance of electric
toys. –Implementation–. In Proceedings of The Gen-
eral Conference of The Institute of Electronics, Infor-
mation, and Communication Engineers, volume A–
14, pages A–355.
Ohkawa, K., Shibata, T., and Tanie, K. (1998). A generation
method of evaluation for a robot considering relation
with other robots. Journal of Robotics and Mecha-
tronics, 39(3):284–288.
PET-TYPE ROBOT COMMUNICATION SYSTEM FOR MENTAL CARE OF SINGLE-RESIDENT ELDERIES
325
