
SIMULATION OF SYSTEMS WITH VARIOUS TIME DELAYS
USING PADE'S APPROXIMATION
Mujo Hebibovic, Bakir Lacevic, Jasmin Velagic
Faculty of Electrical Engineering, University of Sarajevo, Zmaja od Bosne bb, 71000 Sarajevo, B&H
Keywords: Time delay, Pade's function, Simulation, Time constant, Taylor series
Abstract: In this paper, Pade's rational functions have been simulated for approximating several characteristic values
of time delay regarding the plant time constant. Several representative plants were tested in order to show in
which cases Pade’s function approximates time-delay block well. Only if the ratio of time delay versus time
constant of the plant is rather great, or the plant contains emphasized numerator dynamics; approximation
capabilities get poorer. The convergence rate of n-order Pade’s function has been also analyzed by using
Taylor series and phase-frequency characteristics.
1 INTRODUCTION
Many of industrial processes and process control
systems, along with their structural presentations,
contain one or more time delay components
(Dugard, Verriest, 1998; Chen, et al., 2003). These
make an inherent part of the mathematical models
used to describe the systems' dynamics of
management and biological systems as well. Padé
approximations are widely used to approximate a
dead-time in continuous control systems (Vajta,
2000). It provides a finite-dimensional rational
approximation of a dead-time. The accuracy of
applied time delay blocks is particularly important in
computer simulation of complex dynamic systems,
described by high-order equations, then in
computation of convolution integrals etc (Beek, et
al., 1999). The principal problem in their realization
is that their transfer function appears in transcendent
form, what is not quite appropriate for simulation
(Hebibovic, 1991; Vajta, 2000). In order to avoid the
problem, it has long been the practice to
approximate the time delay transfer function with a
rational function (Hebibovic, 1998).
In this paper MATLAB/Simulink features were
exploited and comparison of the first four Pade’s
functions has been done regarding several typical
plants and typical ratios of time-delay versus plant
time constant. Convergence that can be seen well
from simulations is supported by theoretical analysis
using Taylor series.
2 SYSTEM DESCRIPTION
Let's consider a time function u(t) as an input of the
time delay block. The output of this system is the
same function, but with time delay τ, which can be
described by Eq.1.
)t(u)t(x
τ
−
=
(1)
Time delay block can be described in Laplace
form which can be derived from Eq.1.
s
s
e
)s(U
)s(Ue
)s(U
)s(X
)s(G
τ−
τ−
=== (2)
Pade's approximation of time delay block is
very favorable in practice because of good
convergence rate of this approximation. It is also
very interesting theoretical case when Pade's
approximation order reaches infinity.
Pade's function is a rational function determined
by Eqs 3-5 (Hebibovic, 1998).
)s(D
)s(N
)s(W
τ−
τ−
=τ−
µν
µν
µν
(3)
i
1i
)s(
)!(!i
)!i(
)!i(
!
)s(N τ−
ν+µ
−ν+µ
−ν
ν
=τ−
∑
ν
=
µν
(4)
j
1j
)s(
)!(!j
)!j(
)!j(
!
)s(D τ
ν+µ
−ν+µ
−µ
µ
=τ−
∑
ν
=
µν
(5)
289
Hebibovic M., Lacevic B. and Velagic J. (2004).
SIMULATION OF SYSTEMS WITH VARIOUS TIME DELAYS USING PADE’S APPROXIMATION.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 291-295
DOI: 10.5220/0001127402910295
Copyright
c
SciTePress
For practical use, Pade's functon takes form
given by Eq.6 (µ = ν = n)
n
nn
2
2n1n0n
n
nn
2
2n1n0n
nn
sasasaa
sbsbsbb
)s(W
++++
++++
=τ−
K
K
(6)
It's obvious that coefficients a
ni
and b
ni
are
functions of time delay τ.
n,,2,1,0i,a)1(b
,
)!in()!n2(!i
)!in2(!n
a
ni
i
ni
i
ni
K=−=
τ
−
−
=
(7)
Number n determines the order of Pade's
function. It can be seen that Pade's coefficients can
be easily arranged into a square matrix. Eqs 8-10
represent some interresting relations between
adjacent members of a matrix. These relations can
simplify software evaluation of Pade's coefficients
(Hebibovic, 1991).
1n,,2,1,0m,
)in2)(1i(
in
a
a
i,n
1i,n
−=τ
−+
−
=
+
K
(8)
()
n,,1,0m,
)1in)(1n2(2
2in2)1in2(
a
a
i,n
i,1n
K=
+−+
+−+−
=
+
(9)
n,,1,0m,
)1i)(1n2(2
)1in2(
a
a
i,n
1i,1n
K=τ
++
+−
=
++
(10)
3 MAGNITUDE AND PHASE OF n-
ORDER PADE'S FUNCTION
Amplitude-frequency characteristic of time delay
block can be perfectly approximated by amplitude-
frequency characteristic of Pade's function. Beside
that, phase-frequency characteristic of Pade's
approximation converges to phase-frequency
characteristic of time delay block, as order of
approximation reaches infinity (Titov, Uspenskij
1969; Doganovskij, Ivanov 1966.)
If ''s'' from Eq.6 gets replaced with ''jω'',
magnitude and phase of observed function can be
easily determined for every number n that represents
order of approximation. All Pade's functions,
represented with Eq.6 have following form
(Hebibovic, 1998).
K,3,2,1n,
jIR
jIR
)j(W
nnnn
nnnn
nn
=
+
−
=ωτ−
(11)
It is obvious that magnitude of n-order Pade-s
function is equal to 1 (Eq.12)
K,3,2,1n,1)j(W)(A
nnnn
==ωτ−=ωτ
(12)
Unfortunately, this is not the case for phase-
frequency characteristic (Eqs.13-14)
ωτ−=
ωτ−
)earg(
j
(13)
ωτ−
≠
ω
τ
−
=
ω
τ
ϕ
))j(Warg()(
nnnn
(14)
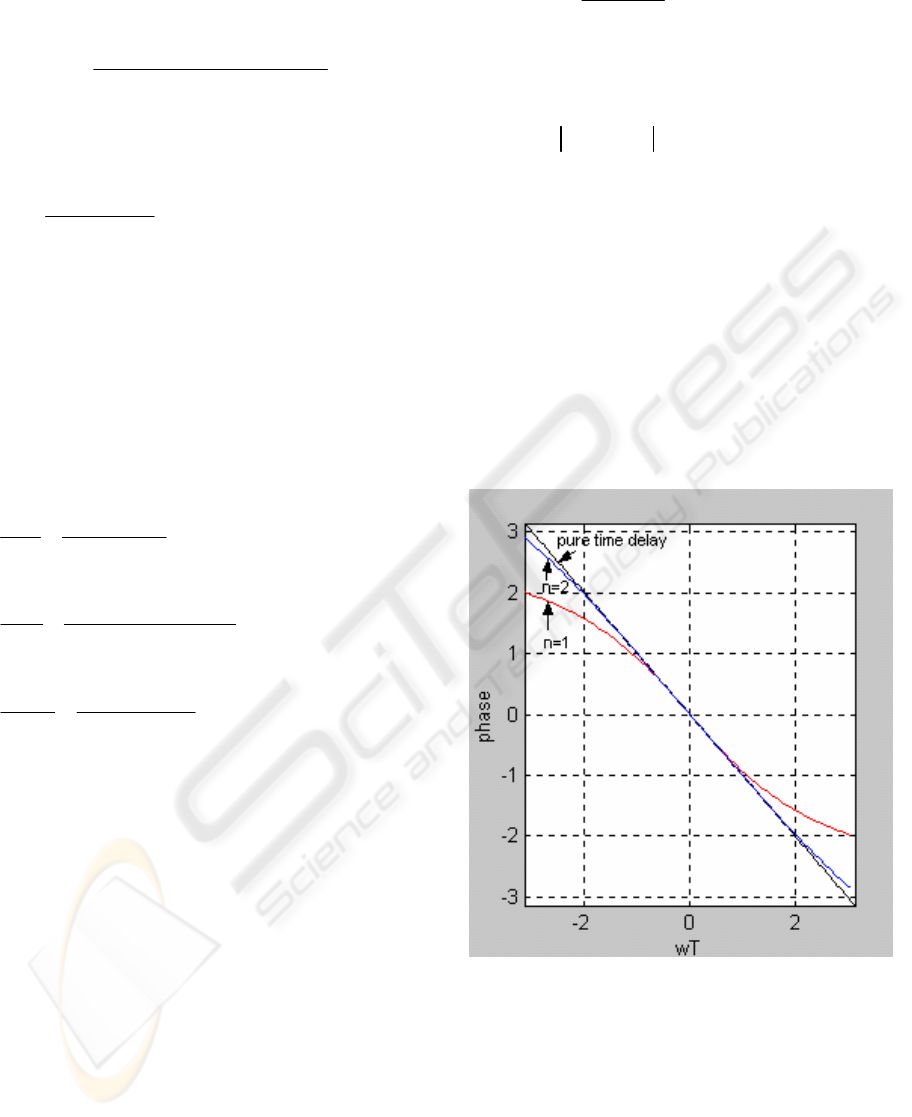
By increasing order of Pade-s function,
equations for phase-frequency characteristic
calculation become more complex, and characteristic
itself converges to phase-frequency characteristic of
pure time delay block (Fig.1, wT ≡ ωτ).
Figure 1: Phase-frequency characteristics of time delay
block and Pade’s functions
The convergence rate of Pade’s function to
transfer function of time delay block can also be
seen from corresponding Taylor series (Eqs 15-17).
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
290
)e(O
3628800
s
362880
s
40320
s
5040
s
720
s
120
s
24
s
6
s
2
s
s1e
s
1
1010
99887766
55443322
s
τ−
τ−
+
τ
+
τ
−
τ
+
τ
−
τ
+
+
τ
−
τ
+
τ
−
τ
+τ−=
(15)
))s(W(O
41472
s
10368
s
3456
s
1728
s
144
s
24
s
6
s
2
s
s1)s(W
222
1010
998877
55443322
22
τ−+
τ
−
−
τ
+
τ
−
τ
+
+
τ
−
τ
+
τ
−
τ
+τ−=τ−
(16)
))s(W(O
3628800
s
362880
s
40320
s
5040
s
720
s
120
s
24
s
6
s
2
s
s1)s(W
553
101099
887766
55443322
55
τ−+
τ
+
τ
−
−
τ
+
τ
−
τ
+
+
τ
−
τ
+
τ
−
τ
+τ−=τ−
(17)
Let k be the number of elements in Taylor’s sum
of W
nn
(-τs), which are identical to corresponding
elements of Taylor’s sum of e
-τs
. Validity of Eq.18
that binds number k with Pade’s function order n can
easlily be shown (Hebibovic, 1998).
1n2
k
+=
(18)
Hence, if n reaches infinity (n → ∞), than all
corresponding elements of two Taylor’s sums are
identical. Therefore, the next equation can be
written:
)s(Wlime
nn
n
s
τ−=
∞→
τ−
(20)
In this case, coefficients of Pade’s polynoms can
be calculated by the following theorem (Hebibovic,
1998).
Theorem: For the order n of Pade’s function
given by the Eq.6 it can be written:
,,2,1,0m,
!
m
2
alima
m
m
nm
n
m
K=τ==
−
∞→
∞
(21)
Consequences of this theorem are that by
increasing the order of Pade’s function to infinity,
perfect approximation of time delay block by
magnitude and phase is obtained. However, this
approximation can be considered only in domain of
theory. In most practical problems, Pade’s function
with order up to four can satisfy.
4 SIMULATION RESULTS
It is interesting to compare the step response of
block that contains pure time delay to step reponse
of block whose time delay sub-block is
approximated with n-order Pade’s function.
Simulations of plants with various τ/T quotients
have been run, where T represents the time constant
of the process.
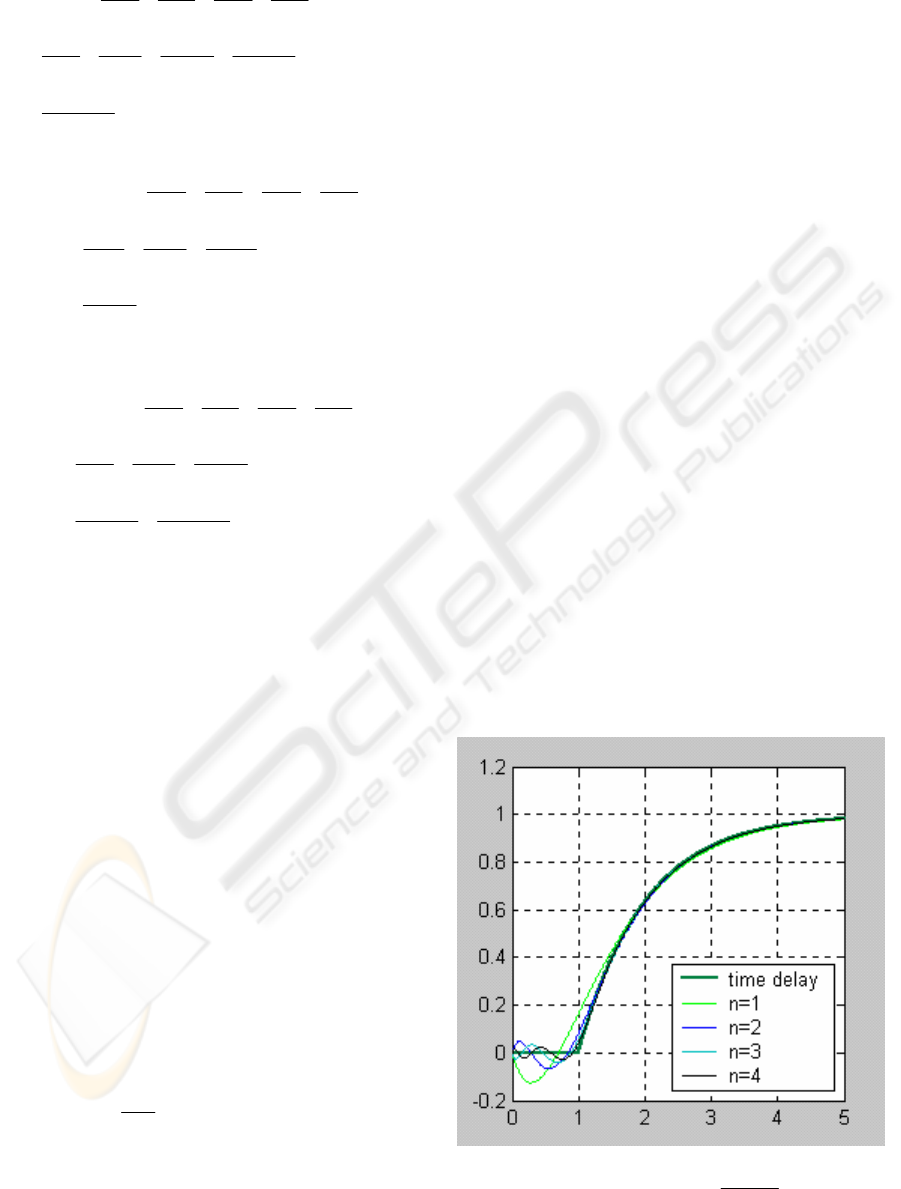
The simulation results are illustrated on Figures 2-9
that presented remarkable feature of Pade’s
approximation. Figures 2-4 show the results
obtained with the first-order static plant including
pure time delay. It is obvious that approximation is
better when τ/T is smaller.
The same procedure has been done with an astatic
first-order plant with several time-delays (Figures 5-
7). The quality of approximation also increases as
τ/T decreases.
Figures 8 and 9 illustrate time responses of
somewhat more complex plant that includes time-
delay. Time response of this transfer function
corresponds to many physiological processes, for
example blood glucose component that is depended
on stress (Hebibovic,
et al., 2003). Empirically, it
can be concluded that the quality of approximation
increases as expression T
1
T/T
d
also increases.
Figure 2: Plant
1Ts
K
e)s(G
s
+
=
τ−
, (τ/T=1)
SIMULATION OF SYSTEMS WITH VARIOUS TIME DELAYS USING PADE'S APPROXIMATION
291
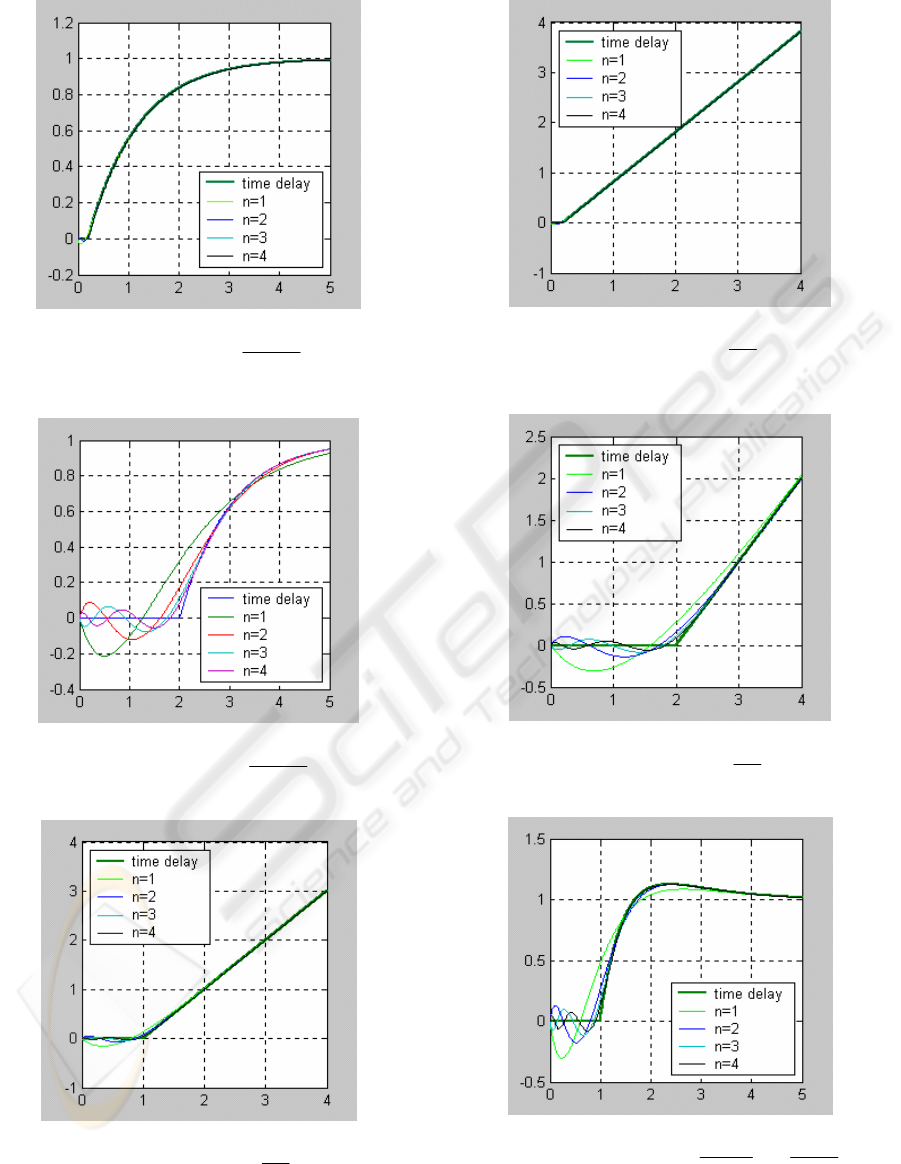
Figure 3: Plant
1Ts
K
e)s(G
s
+
=
τ−
, (τ/T=0.2)
Figure 4: Plant
1Ts
K
e)s(G
s
+
=
τ−
, (τ/T=2)
Figure 5: Plant
Ts
1
e)s(G
sτ−
=
, (τ/T=1)
Figure 6: Plant
Ts
1
e)s(G
sτ−
=
, (τ/T=0.2)
Figure 7: Plant
Ts
1
e)s(G
sτ−
=
, (τ/T=2)
Figure 8: Plant
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
+
=
τ−
1Ts
sT
1
1sT
K
e)s(G
d
1
s
,
(T
1
T/T
d
≈ τ)
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
292
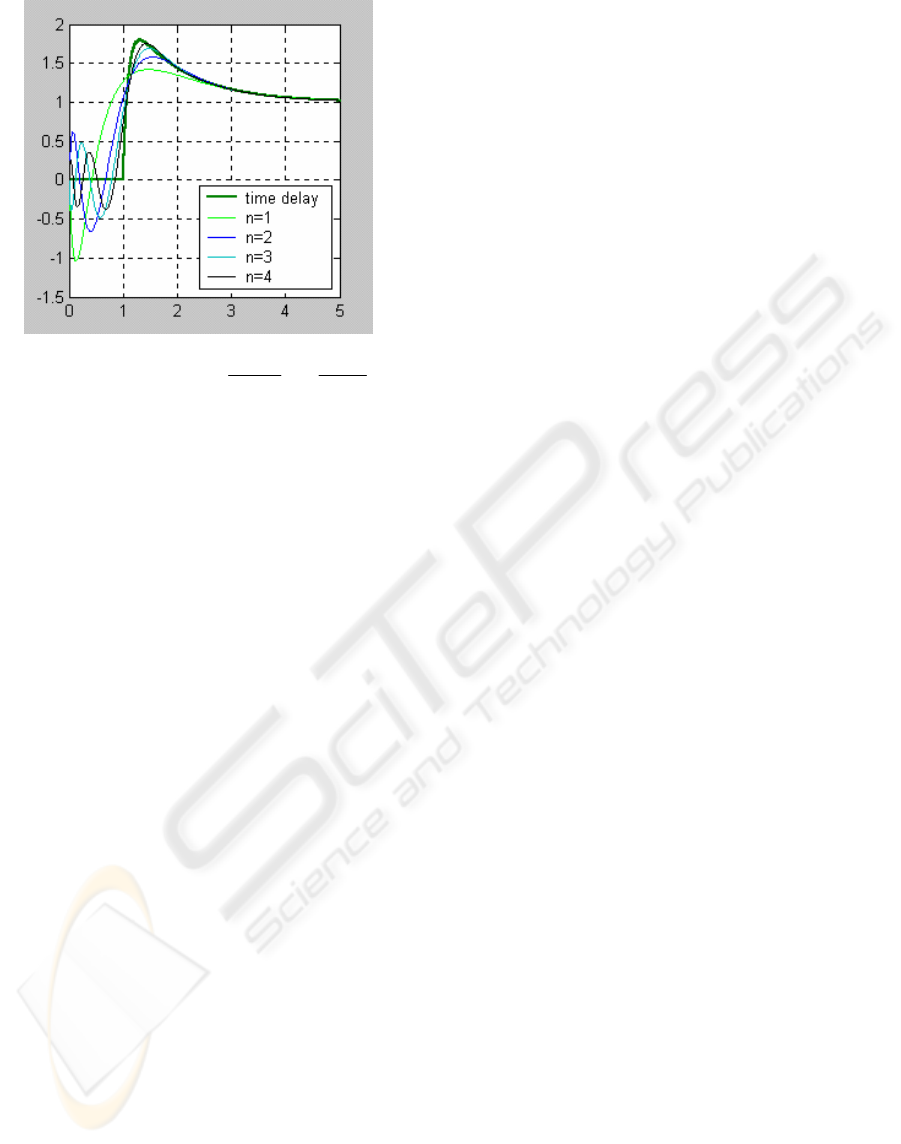
Figure 9: Plant
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
+
=
τ−
1Ts
sT
1
1sT
K
e)s(G
d
1
s
,
(T
1
T/T
d
<< τ)
5 CONCLUSIONS
Simulations have shown remarkable features of
Pade's approximation. It can be seen that the time
response of the plant that contains fourth order
Pade's function fits very well the time response of
the plant with pure time delay. This is common for
typical static and astatic industrial processes with
somewhat smaller time delays. However, the quality
of approximation has certain limits. Simulations
show that Pade's approximation doesn't give
satisfactory results for systems with greater time
delays and /or emphasized derivative time constants.
Future work will explore some different models of
rational functions for approximation of time-delay,
especially within the systems where Pade’s function
didn’t show good performance.
REFERENCES
Chen, J., Gu, K., Kharitonov, V. 2003. Stability of Time-
delay Systems, Birkhauser Verlag.
Doganovskij, S.A., Ivanov V.A. 1966. Ustrojstva
zapazdivanija i ih primjenjenie v avtomaticeskih
sistemah, Izdateljstvo Masinostojenie, Moskva.
Dugard, L., Verriest, E.I. 1998. Stability and Control of
Time-delay Systems, Springer-Verlag, Berlin.
Hebibovic, M., 1998. Identification of the block of
transport delay by using Pade’s approximation
(Doctoral dissertation), University of Sarajevo,
Faculty of Electrical Engineering, Sarajevo.
Hebibovic, M., 1991. Fast algorithm for calculating the
coefficients of Pade’s approximation of time delay
block random order, Bilten No 25, Center of RV I
PVO, Rajlovac-Sarajevo.
Hebibovic, M., Lacevic, B., Alagic, S., Kulenovic, I. 2003.
Control of Blood Sugar Components and Their
Computer Aided Modelling, 7th World
Multiconference on Systemics, Cybernetics and
Informatics (SCI 2003), Orlando, USA, July 27-30, pp.
12-16.
Titov, N.I., Uspenskij V.K. 1969. Modelirovanije sistem s
zapazdivanijem, Energija, Leningrad.
Vajta, M. 2000. Some Remarks on Padé-Approximations,
3rd TEMPUS-INTCOM Symposium, September 9-14,
Veszprém, pp. 251-256.
Van Beek, D.A., Rooda, J.E., Trienekens, B.J. 1999.
Hybrid Modelling and Simulation of Time-delay
Elements, In. Proc. of 11th European Simulation
Symposium, Erlangen, pp. 88-92.
SIMULATION OF SYSTEMS WITH VARIOUS TIME DELAYS USING PADE'S APPROXIMATION
293
